
【Jack Hsu】專欄

關於專欄作者
Jack Hsu工作經驗超過二十年,主要專長機電整合、電腦視覺、人機互動、人工智慧、專利分析及新創輔導。曾任機電整合工程師、機器視覺研發副理、技轉中心商業發展經理。目前擔任多家公司兼任技術顧問並積極推廣實境互動相關技術,並主持:

【開發資源】TinyML MCU 等級開源推論引擎
開源推論引擎在人工智慧應用中扮演著關鍵角色,提供了多樣化且高效能的解決方案,以應對從嵌入式系統到大型資料中心的廣泛需求,本文將介紹TinyML MCU 等級開源推論引擎的連結資源。

Arm架構引領行動運算新典範:開發者無痛轉移密技大公開
Arm在Computex 2025特別為開發者舉辦了線下技術分享及交流活動。第一天主要以雲端人工智慧為主軸,而第二天則將重點放在行動遊戲與行動人工智慧(Mobile Gaming and Mobile AI)。
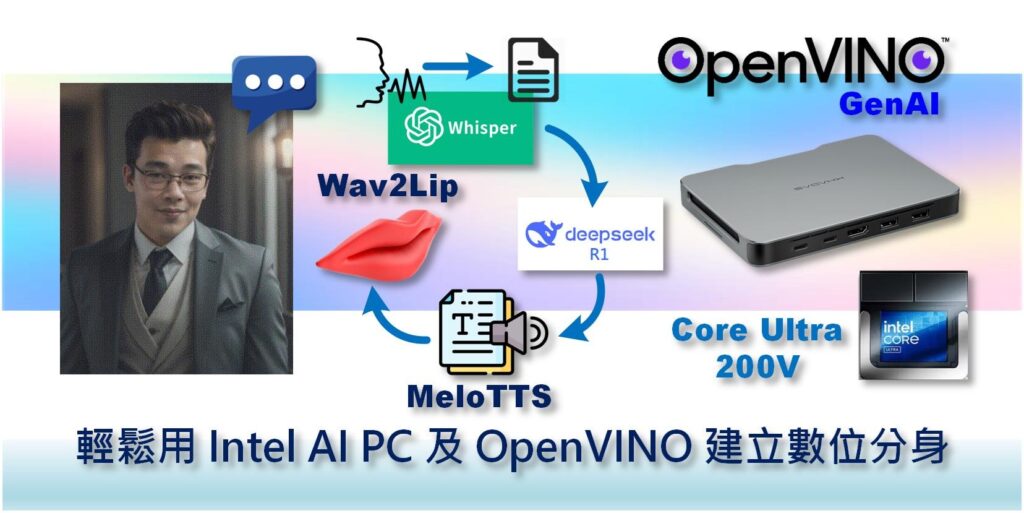
輕鬆用Intel AI PC及OpenVINO建立數位分身
一個完整的數位分身,就像真人一樣,要具有自然語言對話、豐富肢體動作和產生生動表情的能力,其中就需要用到許多生成式AI技術,包括利用語音轉文字(STT)得到問題的文字,交給大語言模型(LLM)進行文字問答,再將文字轉語音(TTS)把答案讀出,最後再配合語音自動對嘴形(Lip Sync)讓人物影像的嘴巴也能和語音同步動起來。
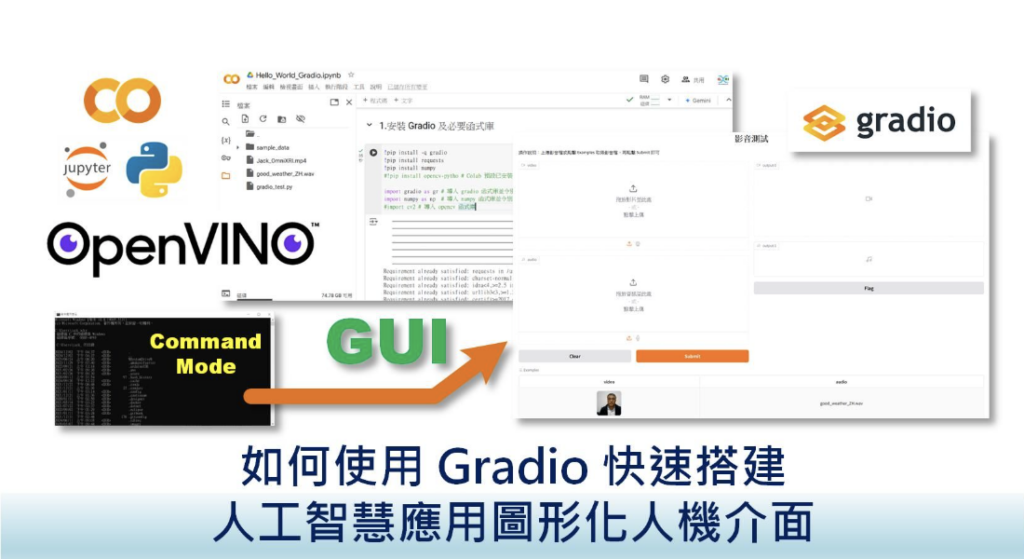
【Edge AI專欄 】 如何使用 Gradio 快速搭建人工智慧應用圖形化人機介面
目前已有很多 AI 相關應用都是Gradio這項GUI工具,包括大型語言模型對話,影音生成等,本文將介紹如何來使用Gradio。

如何使用Intel AI PC及OpenVINO實現虛擬主播
為了使大家能更進一步理解如何實作一個簡單離線版(邊緣端)的虛擬主播,可以輸入所需文字,產生對應語音,配合閉嘴人物影片生成新的對嘴影片。接下來就分別從「推論硬體及環境建置介紹」、「MeloTTS 文字轉語音生成」、「Wav2Lip 自動對嘴影片生成」及「建置完整虛擬主播」等四大部份作更進一步說明。
【Edge AI專欄】 邊緣端小語言模型崛起,開發板跟上了嗎?
本文將幫大家盤點一下常見的19個廠商提供的37種小語言模型,16種 MCU / MPU / SoC 等級 LLM 開發板解決方案,讓大家未來在開發相關應用時能有更多選擇。

【 Edge AI專欄】使用Intel OpenVINO搭配YOLOv11輕鬆駕馭姿態偵測
Intel OpenVINO 在開源範例庫 Notebooks 上給出 YOLOv11 物件偵測、姿態估測及影像分割等三個案例。本篇文章,會跟著源碼說明來了解一下如何運行 【姿態估測】 範例「Convert and Optimize YOLOv11 keypoint detection model with OpenVINO™」及動作原理。
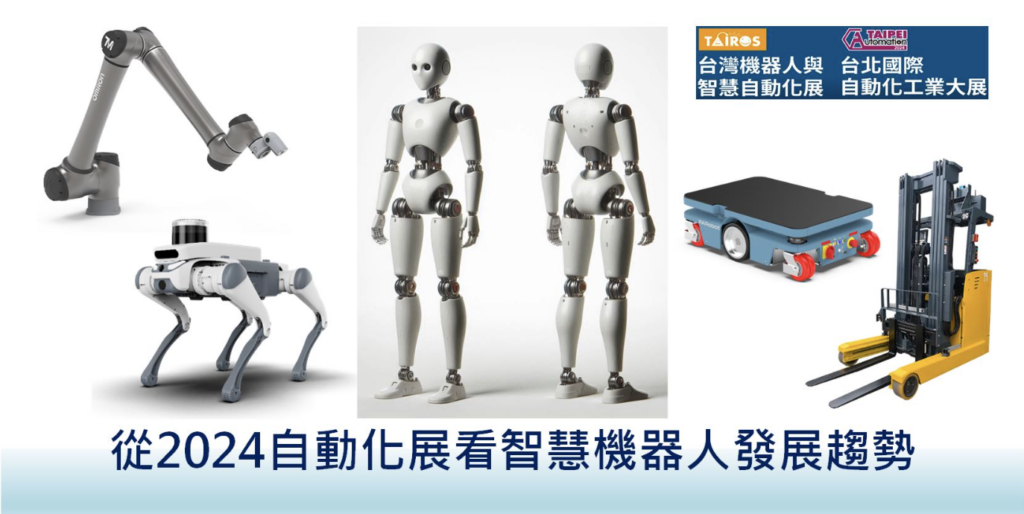
【 Edge AI專欄】 從2024自動化展看智慧機器人發展趨勢
為了讓大家能更了解此次自動化展智慧機器人相關技術,本篇文章會分別從「智慧機器手臂」、「輪型機器人」、「多足型機器人」及「人型機器人」等四個大類為大家介紹。

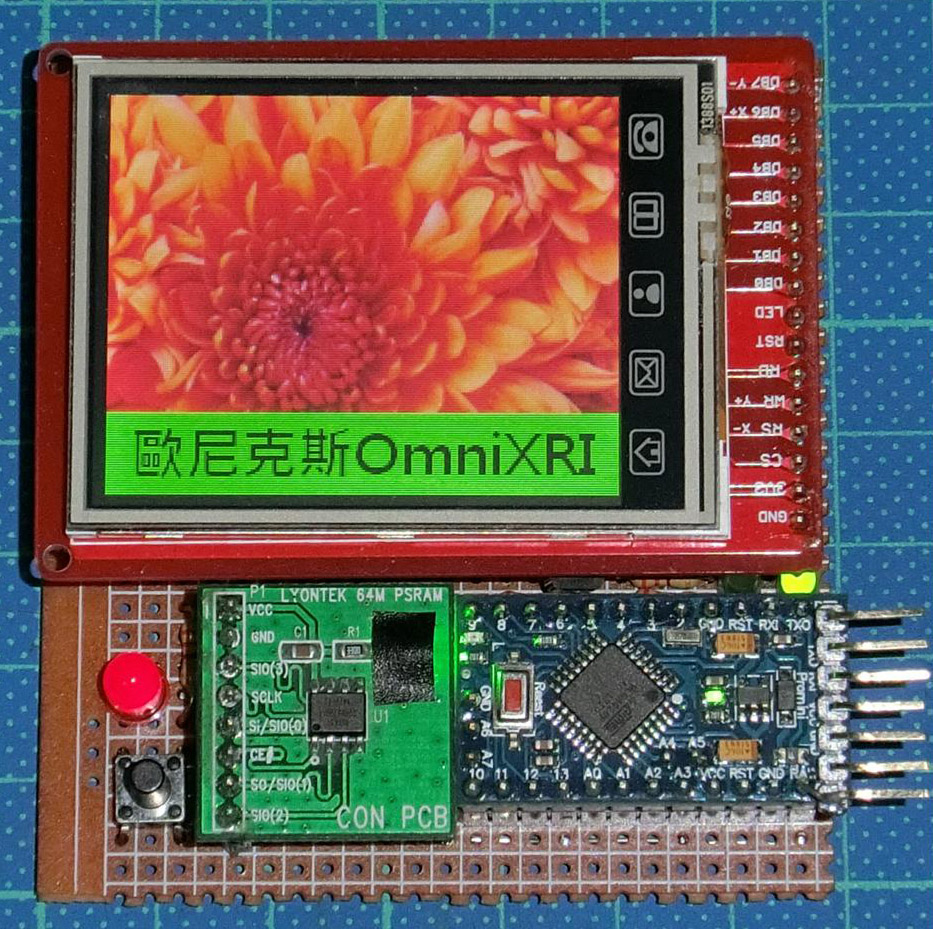
【Edge AI專欄】 單晶片也能輕鬆玩AI影像辨識?難道土耳其大叔來了?
本篇文章將分享一下只用單晶片(MCU)等級晶片也能運行微型機器學習(TinyML)類型的人工智慧應用,如聲音辨識、電腦視覺、時序預測等。

【Edge AI專欄】當MCU遇上NPU能擦出什麼新火花?
為了讓大家更了解 MCU 加上 Micro NPU 究竟能幫大家帶來什麼好處,本文就以Seeed Studio和奇景光電合作的 Grove Vision AI Module v2 開發板及 Seeed SenseCraft AI (TinyML) 開發平台,帶著大家一起來玩玩微型 AI 電腦視覺應用。

【Edge AI專欄】從Computex 2024看邊緣智慧明日之星NPU
此次 NPU 不意外地成了 Computex 2024 的目光焦點,為了讓大家更了解什麼是 NPU,為何要用 NPU 及此次 Computex 2024 究竟各家端出了什麼大菜,本文整理給大家參考。
【Edge AI專欄】 開發者如何選擇 Edge AI 開發方案
「Edge AI」到底是什麼,可能問十個專家會得到十一種答案,但這些都沒有對錯,只是大家都以自己的立場回答問題而已。本篇文章,會就Edge AI方案挑選幾項重點項目進行介紹。

【Edge AI專欄】AIPC開箱實測 ─ Yolov8斜物件偵測
本篇文章會使用Asus NUC 14 PRO來進行AI推論應用,並從AIPC 硬體規格、安裝工作環境、旋轉物件偵測及在不同硬體運行效能分析比較等方面幫大家做一個完整的介紹。
【開箱評測】看研華科技 AIR-150 搭載 Hailo-8 26TOPS AI推論晶片如何成為邊緣智慧新利器
本篇文章會對研華科技的微型工業電腦 AIR-150 進行評測。這款機器內搭 M.2 型式 Hailo-8 高效 AI 加速模組,具有 26 TOPS 推論能力,正好可以解決惡劣環境、空間窄小及AI應用推論算力不足的問題。
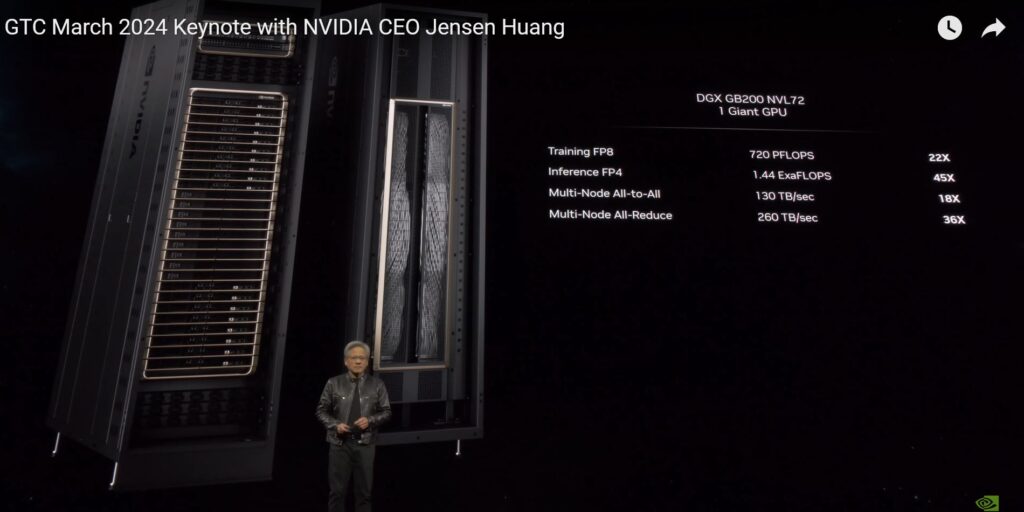
Nvidia GTC 2024 提出的 FP8/FP4 如何加速AI訓練及推論
新一代 GPU Blackwell B200 在硬體端提供了 FP4 計算能力,單片就可達 20 petaFLOPS,二片 B200 組成的 GB200 在訓練性能是前一代 H100 的 4 倍,推論性能更高達 7 倍。若再將 36個 CPU 加上 72 個 GPU 組成「GB200 NVL72」超大型伺服器,則 FP8 訓練能力可高達 720 petaFLOPS, FP4 推論能力更高達1.44 exaFLOPS。而究竟什麼是 FP8 / FP4 呢?本篇文章會簡單幫大家科普一下。

【Edge AI專欄 #15】從MWC 2024看AI手機未來發展
一年一度的世界通訊大會(MWC 2024)於2/26到2/29在西班牙巴塞隆納盛大舉行,此次重點落在了AI上,尤其是不靠連網、本機可獨立運算的生成式應用。為了讓大家更理解AI手機究竟有哪些方案供應商,硬體上究竟有哪些重大突破及軟體上到底能玩什麼應用,本篇文章會為各位一一介紹!

如何在Google Colab上運行OpenVINO Open Model Zoo範例
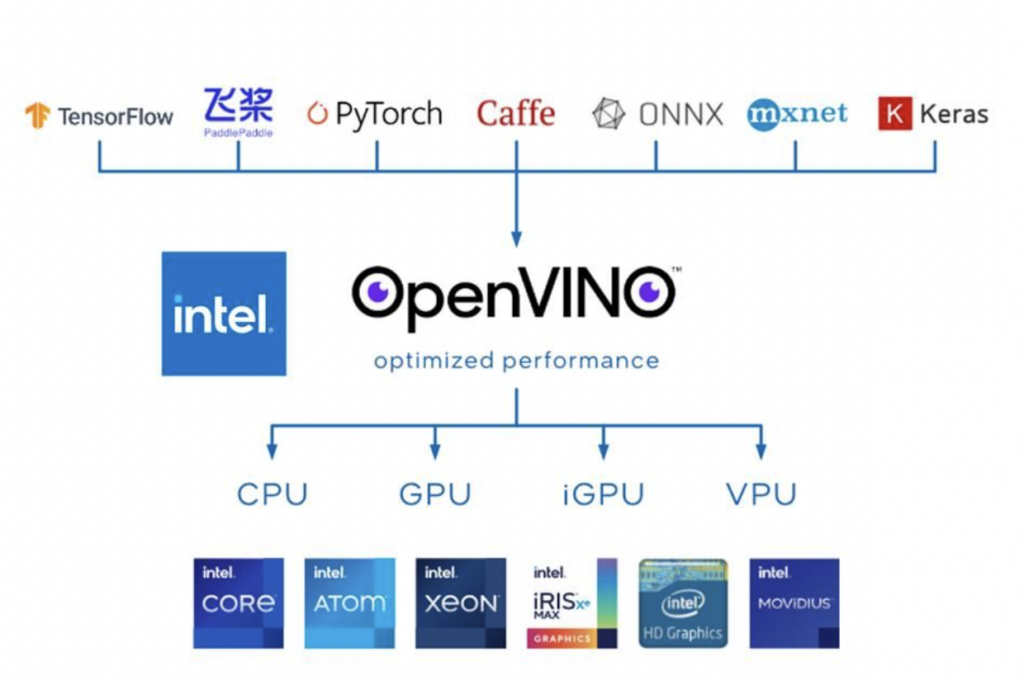
本篇文章會以OMZ 影像分類(Classification) Public Pre-Trained Models為例,說明如何在Colab 上直接運行Intel Open Model Zoo。

【Edge AI專欄】從CES 2024 看Edge AI及TinyML最新發展趨勢
今年CES的主軸:人工智慧、數位健康、永續發展、汽車科技、遊戲與電子競技、擴增/虛擬實境、智慧城市、智慧家居等領域最新技術。為了讓大家更了解在邊緣智慧(Edge AI)和微型機器學習(TinyML / MCU AI)的最新趨勢,本篇文章簡單盤點了此次四十多項較具代表性的產品讓大家認識一下。


【Edge AI專欄】AI Maker世代即將展開 – 大家跟上了嗎?
這一年來,遠在天邊(雲端)的技術迅速落地(邊緣),高階手機(Mobile)、單板微電腦(SBC)甚至高階單晶片(MCU)也有機會玩AIGC相關應用,這似乎意味著「AI Maker世代」即將到來。本篇文章,幫大家整理了有哪些硬體、軟體相關技術資源可用,還有哪些創意、應用可能成為AI Maker的新寵。

【Edge AI專欄】Edge AI如何協助淨零碳排
為了讓大家更了解追求淨零碳排發展歷史及如何利用邊緣智慧(Edge AI)及微型機器學習(TinyML)技術來改善生活中能源的不當浪費,本文簡單介紹了五個案例,希望能拋磚引玉,吸引更多創意發想!
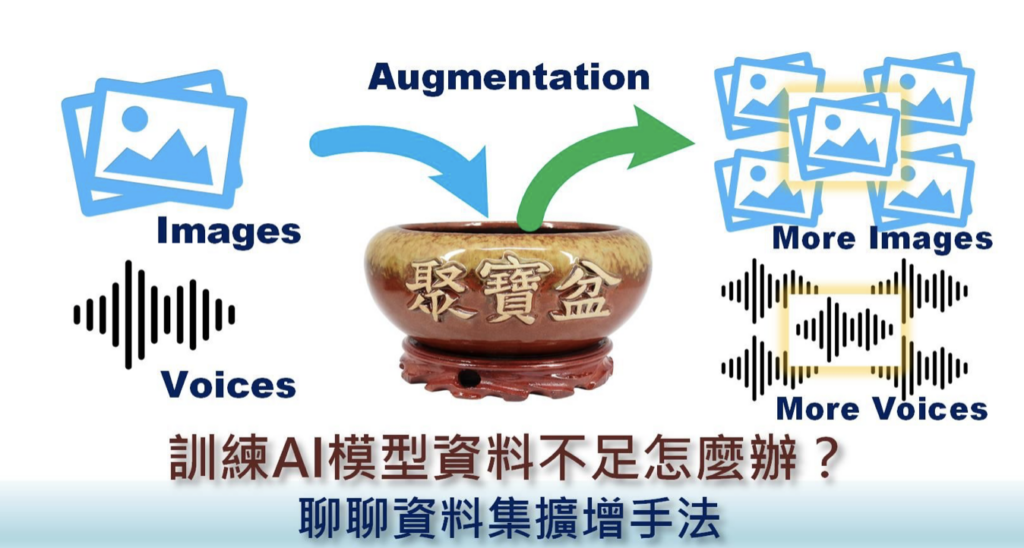
【Edge AI專欄】 訓練AI模型資料不足怎麼辦?聊聊資料集擴增手法
本篇文章會簡單盤點一些常見的資料擴增手法,包含影像類(二維資料)及時序類(一維資料,如聲音、溫度、振動等各式感測器產生的連續信號),希望能帶給大家一些幫助。

【Edge AI專欄】從臺灣智慧農業週2023 看邊緣智慧最新趨勢
剛落幕的臺灣智慧農業週及臺灣國際海洋暨漁業產業展中有相當多廠商秀出AIoT應用,主要分為傳統的智慧監控、遙控、管理及新一代具有影像、聲音分析能力的邊緣智慧應用,本篇文章會針對後者幫大家簡單介紹幾項最新邊緣智慧的應用。
【Edge AI專欄】 親愛的我把AI模型縮小了- 模型減量與壓縮技術簡介
雖然我們難以像蟻人或黃蜂女一樣把自己縮小而保持生理機能不變,但把超巨大的AI模型縮小而保持推論精度不變,還是有很多方法可以達到的。接下來我們就來幫大家簡單介紹一下幾種常見技術。
【Edge AI專欄】TinyML (MCU AI) 運行效能誰說了算?
6月27日,公佈了Tiny v1.1測試結果報告,其中包括了台灣新唐科技(Nuvoton)及臺灣發展軟體科技(Skymizer)提交的亮眼成果。本篇文章會來幫大家解讀一下這份報告,讓大家能更了解未來單晶片運行AI的方向及可行性。

【開箱評測】OpenVINO讓你不上網也能和Dolly聊聊天
以往在AI模型部署優化及推論部份,通常都會想到使用 Intel OpenVINO,不過大家多半只注意到它在「電腦視覺」相關的應用,殊不知自從2022.1版後就已開始加入許多「自然語言」的範例。而最近2023.0版又更加強GPU處理記憶體動態外形(Dynamic Shape)的能力,使得如生成型預訓練變換模型(GPT)這類基於轉換器(Transfomer)技術的大型語言模型能得到更好的實現。

【Edge AI專欄 #06】 Intel OpenVINO 2023.0初體驗─如何快速在Google Colab運行人臉偵測
如今在學習AI時,往往需要一個好的教練指導開發AI的每個步驟和細節,不然就得換一套方便的工具,讓我們能專心在開發應用程式而不需要了解太多AI的數學和原理,而其中 Intel OpenVINO Toolkit就是一套不錯的AI推論(Infernece)優化工具。

【Edge AI專欄 #05】Google MediaPipe快速上手 ─ 浮空手勢也能用來當作簡報播放器
本篇文章會介紹MediaPipe及其手部追蹤、手部特徵點提取及手勢辨識的原理,最後再用浮空手勢辨識來控制PowerPoint簡報播放的實例,讓各位感受一下這項工具的方便好用之處。

【開箱評測】巴掌大的迷你主機也能跑出高效AI推論表現!
為了更進一步了解這類迷你主機在AI推論效能的表現,此次選用東擎(ASRock Industrial) NUC BOX-1260P作為測試機,AI推論部份則選用OpenVINO 2022.3版作為基礎工具。而測試項目則使用OpenVINO Notebooks中最新的物件偵測「Convert and Optimize YOLOv8 with OpenVINO」範例作為實測效能的分析。

【Edge AI專欄】從Embedded World 2023看Edge AI及TinyML最新發展趨勢
2023年嵌入式世界展會在德國紐倫堡順利落幕了,在展會中自然也包括了Edge AI及TinyML的相關應用,本文會根據此展會中所展示的項目,帶大家一同看Edge AI及TinyML的發展趨勢。

【Edge AI專欄】AI晶片發展歷史及最新趨勢
想要玩邊緣智慧(Edge Artificial Intelligence, Edge AI)前,我們要先來認識基本觀念,本篇文章會逐一為大家介紹不同類型的AI晶片用途及優缺點,又有那些常見分類及未來可能發展方向。
【Edge AI專欄】要玩AI前,先來認識數字系統
先從類比、數位系統的關係開始介紹,再來會說明數位系統是如何表示整數及小數,最後會詳解AI模型訓練和推論常用的數字系統,及最新AI專用的數字系統,以便幫大家建立好玩AI前的基本功。

從CES 2023 看Edge AI及TinyML最新發展趨勢
CES 2023有許多創新產品令人眼睛一亮,在邊緣智能(Edge AI)及微型機器學習(TinyML)相關產品亦有非常精彩的表現,本文將幫大家盤點一下。

讓你也能成為智能影音分析大師 – Intel OpenVINO DL Streamer
Intel OpenVINO Toolkit 2022.1版在今年作出不少重大變革,本文將帶大家認識DL Streamer架構及安裝技巧,以及分析DL Streamer的表現,帶領大家深入了解OpenVINO這項好用的工具。
如何在Windows安裝Linux(WSL2+Ubuntu)及Docker來執行OpenVINO和DL Streamer
隨著Win11上市,WSL2也迎來較大幅度的更新,本文將帶著大家從零開始一步一步架設Linux開發環境並且安裝安裝Intel OpenVINO、Docker和DL Streamer進行練習。

有了OpenVINO 2022 PrePostProcessor APIs,影像推論就更有效率了!
OpenVINO 2022.1版本中,透過PrePostProcessor (PPP) APIs使得推論效能有明顯的改善,當使用iGPU來推論時,其效能更大幅超越CPU和神經運算棒(NCS2, Myriad X)。PPP的特色及優勢為何?且看本文介紹。
OpenVINO 2022大改版 讓Edge AI玩出新花樣
Intel開發的電腦視覺與深度學習應用的開發套件OpenVINO自2018年問世以來,造福了不少AI應用的開發者,而今年發布的2022.1版是這三年半來最大幅度的更新,本文將簡單盤點此次更新的幾大要點。
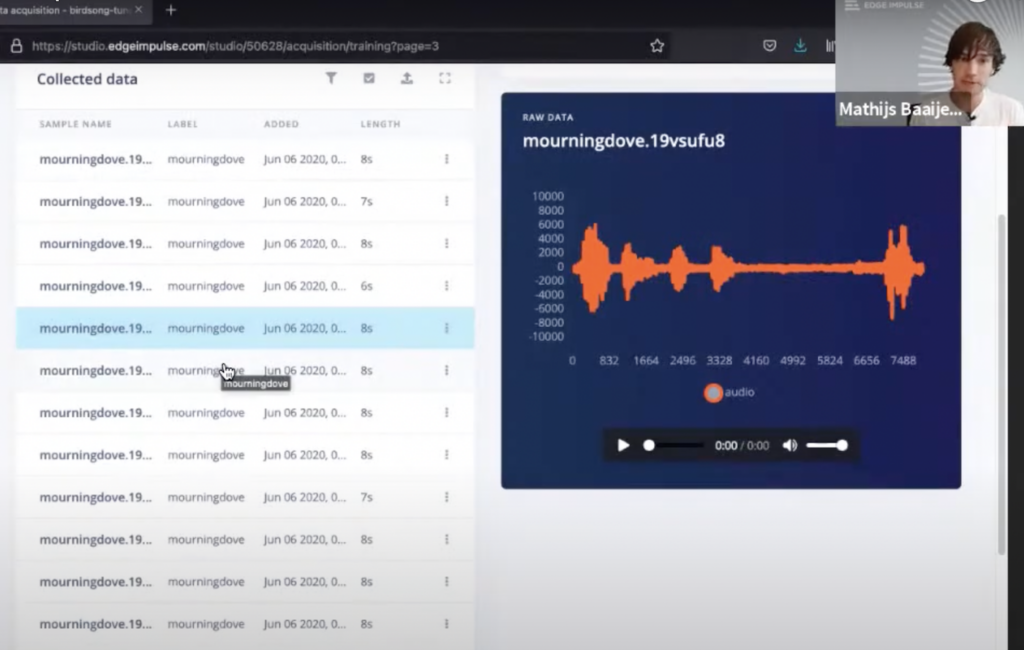
【Edge Impulse】EON Tuner AutoML工具介紹
EON Tuner是一項對於憑經驗手動逐一調整設定參數來說特別好用的工具,是可更輕鬆並快速找出多種合適且優化的模型,方便我們快速迭代及驗證想法。
當AIoT遇上tinyML是否會成為台灣MCU供應鏈下一個新商機!?
結合AI與IoT的智慧物聯網AIoT是近期科技業最火熱的行銷關鍵詞,tinyML(MCU等級的AI)也正悄悄崛起。本文將探討AIoT、MCU及tinyML之間的關聯,能帶給台灣MCU產業鏈什麼樣的機會,以及如何整合才能變成下一個明星產業。
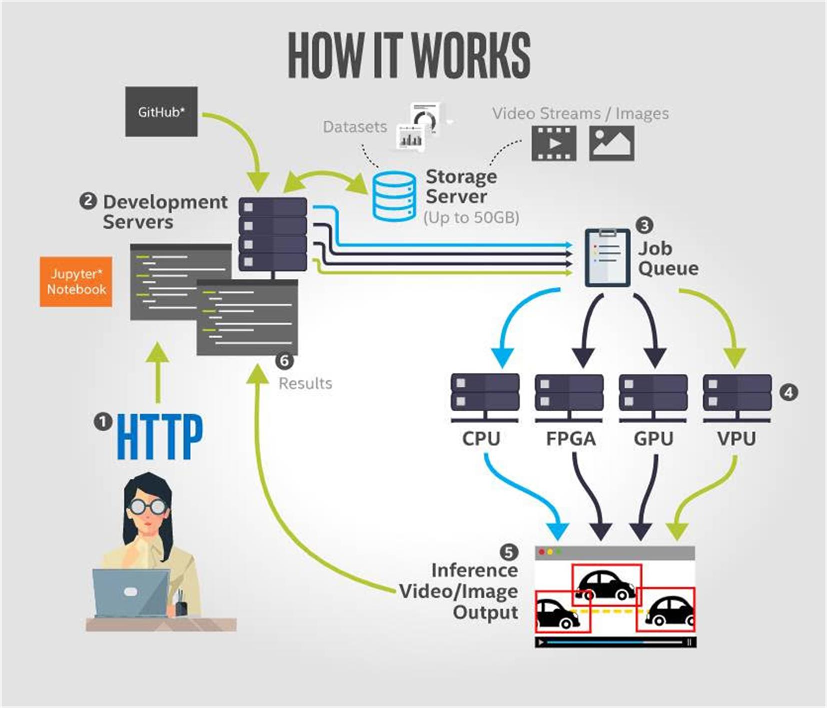
【先試再上】Intel DevCloud助你雲端驗證AI佈署,免費!
Intel 推出的免費雲端開發平台「DevCloud」,不僅提供OpenVINO讓使用者進行AI推論程式開發及測試,更協助評估佈署後效能,讓使用者可以更精準地採購所需設備。本篇文章將帶領讀者深入了解這項免費工具。

小孩才作選擇,AI推論速度及準確度我全都要 ─ OpenVINO Post-Training Optimization Tool簡介
身為人工智慧(AI)從業人員,如何兼顧模型的速度和準確度是一大挑戰。利用INTEL OpenVINO推出的「Post-Training Optimization Tool (POT)」能有效解決,一起來了解如何使用吧。

不用寫程式也能玩轉深度學習模型 ─ OpenVINO™ DL Workbench圖形化介面工具簡介
DL Workbench(Deep Learning Works Benchmark)一個方便的網頁式圖形化介面工具,讓非程式設計背景的社群夥伴都可以輕鬆使用,一起來看看其使用流程以及範例操作吧!

串流影片分析慢吞吞?看OpenVINO™ DL Streamer如何加速效率
當深度學習技術遇到視訊檔案或串流影片時,逐格(by Frame)影像分析就變得很沒效率,有辦法提升嗎?可試試用DL Streamer來加速喔。

如何利用Docker快速建置OpenVINO™ Toolkit開發環境
為解決安裝步驟系統無法運行,OpenVINO推出Docker安裝方式,輕鬆搞定安裝及執行問題,本篇簡單說明Docker是什麼?以及相關的工作環境以及範例說明。

【開箱測試】開機即用的研華AI人臉辨識系統
透過研華最新「AI人臉辨識運算智能系統」,並搭配和訊連共同開發的FaceView及Intel VPU加OpenVINO,作者從不同面向來開箱評測,帶大家了解這套系統。

【OpenVINO™教學】土炮智能機器手臂之視覺系統
機器手臂早已成為自動化工廠中不可或缺的最佳幫手,本篇文章將會說明如何使用Intel OpenVINO™+RealSense™自製機器手臂之視覺系統。
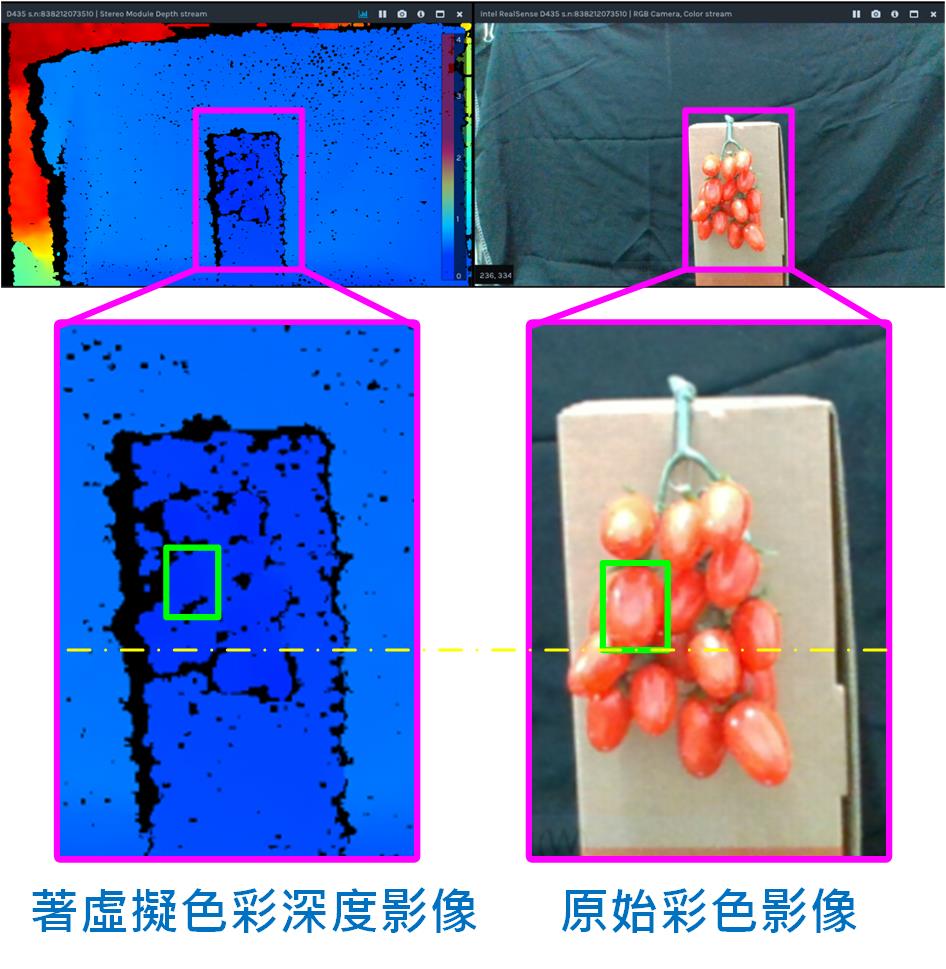
【AI_Column】如何以YOLOv3訓練自己的資料集 ─ 以小蕃茄為例
本篇文章使用 RealSense D435 深度感測器取得影像,以 YOLO v3 為演算法,並以辨識(偵測)小蕃茄為例和大家介紹從收集(取像)、標註、訓練資料集到推論的工作流程。

【文創新利器】4D (Volumetric Capture) 建模與重現
文化部「IP內容實驗室」重金由法國引進的「4DViews」系統,且聽Jack解說這技術如何協助台灣多個文創領域產生新的火花。

【3D感測器】如何擷取Intel RealSense™串流影像到OpenCV
本篇文章將教大家如何從RealSense SDK擷取彩色、深度及紅外線串流影像並導入OpenCV中,方便後續開發自己的人機介面及相關計算功能。

搭配OpenVINO與OpenCV 電腦視覺一點都不難
處理電腦視覺只能靠 OpenCV 單打獨鬥嗎?OpenVINO 開源工具其實強化了「深度學習」技術在電腦視覺的相關應用,有效搭配兩者將能提升執行效能。

Intel RealSense™ SDK 無痛安裝指引
本篇文章以 Windows 10 環境安裝RealSense D435 為例,帶著大家一步步完成 SDK 安裝及 3D 感測器的韌體更新。

【OpenVINO™教學】土炮體感控制系統
微軟推出的Kinect雖然在2017年停產,卻也讓體感互動更上一層樓,但其實想要自製體感控制系統也不無可能,本篇文章將會說明,如何使用Intel OpenVINO結合OpenPose預訓練模型來完成「土炮體感控制系統」。
【OpenVINO™教學】土炮影像實例分割型智慧監控系統
過去要做到精準的物件偵測,不僅需要高難度的技術更需要專家協助,但運用OpenVINO能讓「語義分割」及「實例分割」的開發難度大大降低,本篇文章將會分享「實例分割型智慧監控系統」的概念驗證實驗。

【AI_Column】從 AIGO 業界出題看如何成功導入 AI
本篇文章依據AIGO第二梯次的廠商出題,探討一般人對 AI 的迷思、說明如何確認導入 AI 成效及未來該如何出題才能得到快速有效的解題方案。
如何讓Jetson Nano順利執行OpenCV中CUDA函式
本篇文章教大家如何讓 Jetson Nano 能順利執行 OpenCV4.1.0 中 CUDA 相關函式,該下載什麼、輸入什麼指令,全部詳細告訴你,有一樣困擾的人快來看看。

【AI_Column】3大熱門AI開發板效能比較文摘要
本篇文章摘要了外國網友比較三個 AI 開發版的文章,內容則是樹莓派加 Intel 神經計算棒、 NVIDIA Jetson Nano 及 Google Coral 三者的實驗數據比較。
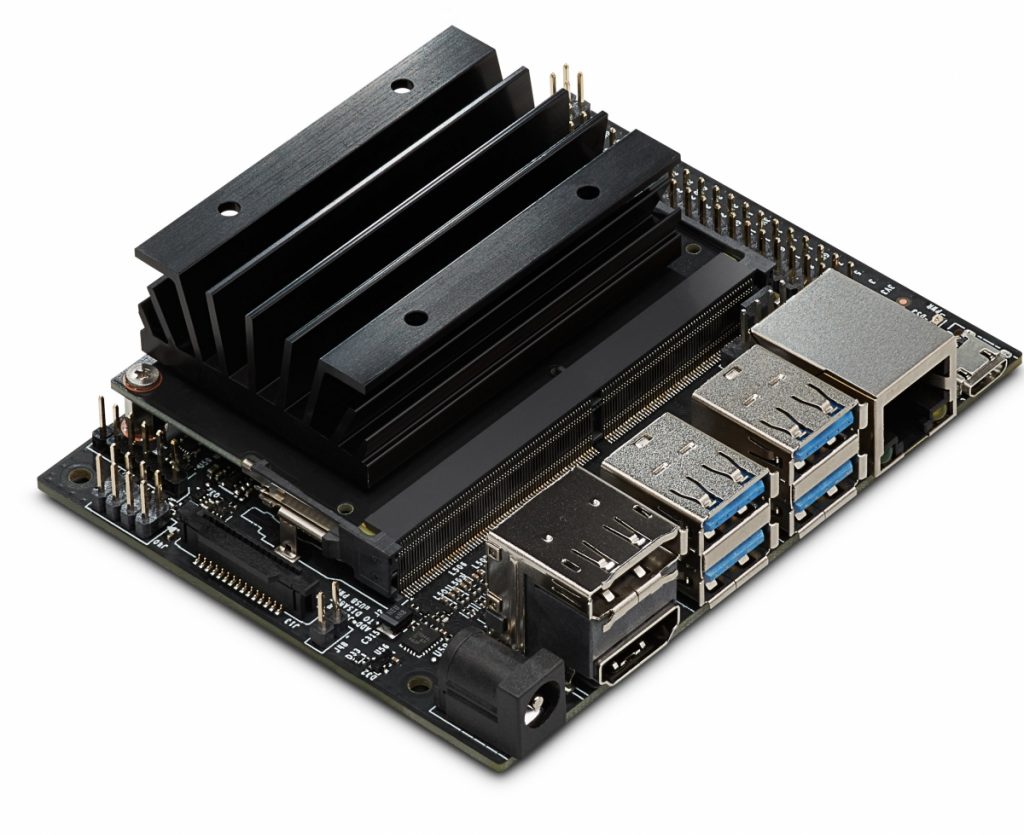
【AI_Column】Nvidia Jetson Nano 真的比 Google Edge TPU 厲害嗎?
Nvidia 近期推出 Jetson Nano AI 開發板,勇奪各大人工智慧社群版面,來看看當前市場上三大 AI 開發板的比較吧!
【AI_Column】從 AIGO 業界出題內容看台灣 AI 如何落地
本文解析 AIGO 「產業出題、AI人才解題」的出題內容,並剖析分別屬於「電腦視覺」、「自然語言」及「數據分析」三大領域涵蓋的範圍及核心技術。

【AI_Column】樹莓派(Pi 3+)安裝 OpenCV4 / QT5 心得
本篇文章提供在樹莓派(Pi 3+)上安裝 OpenCV4 / QT5 的紀錄及注意事項,幫助大家順利進入開發環境。
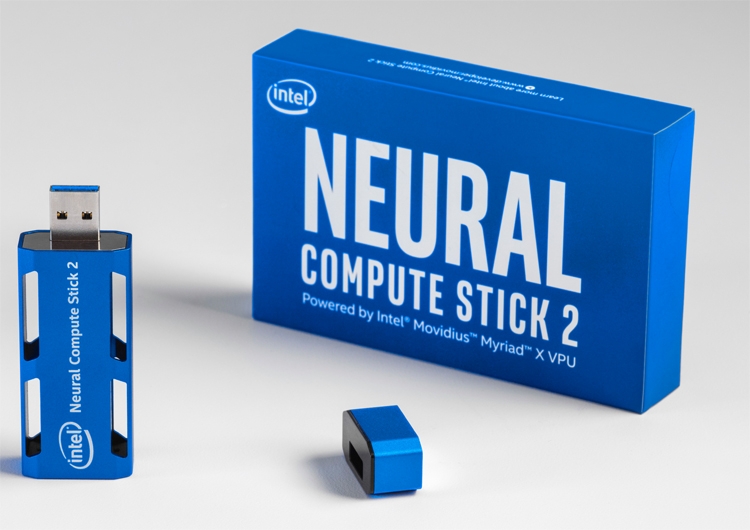
【AI_Column】AI 神經計算棒大比拼:Intel Movidius vs. Orange Pi
USB 神經計算棒能加速執行深度學習推論工作,深受創客喜愛,本篇文章比較 Intel Movidius NCS、才剛推出的 NCS 2,及其競爭對手推出的不同規格。

【AI_Column】移植 Movidius 神經計算棒到 Pi Zero W
人工智慧當道,對於想學習及實作的 Maker 而言,樹莓派加上 Intel Movidius 神經計算棒(NCS)大概屬最容易取得且最經濟的平台,本文將教你如何打通NCS與Rasberry Pi Zero W連結運作的層層難關。
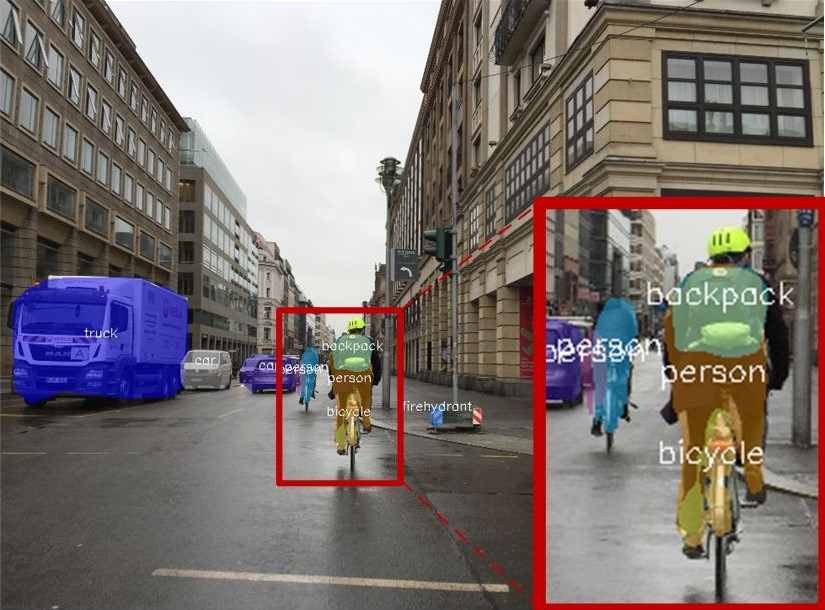
【AI_Column】運用 Intel OpenVINO 土炮自駕車視覺系統
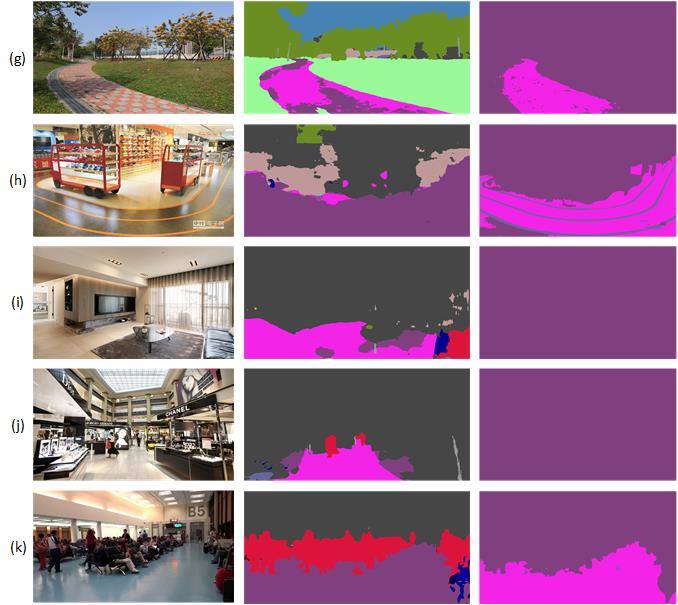
本文除了介紹影像語義(像素級)分割原理、OpenVINO基本架構,更以如何建構自駕車視覺系統為例,介紹如何應用OpenVINO中預先訓練與優化的模型來進行場景辨識。

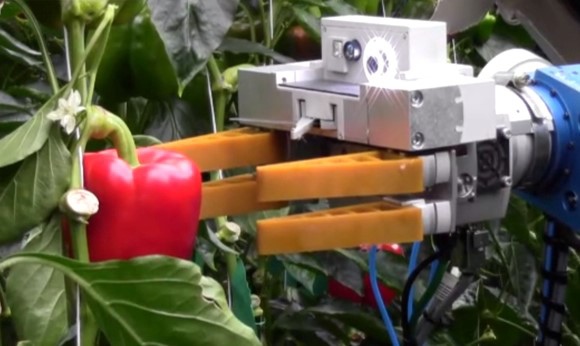
【智慧農業】採收機器人之視覺技術現況
採收機器人主要包含幾大部份,自走車(導航、定位)、機器視覺(果實空間XYZ位置、果實成熟度)、機器手臂(摘取、置放)等,本文將介紹視覺部份的可行技術現況。

【AI_Column】影像式AI虛擬助理真的要來了嗎?(下)
上一篇從影像式AI虛擬助理的應用場景以及關鍵技術進行討論,而下篇則著重在於市場趨勢發展,在目前市場發展的趨勢下,「語音助理」已經看似走到了瓶頸,而影像式AI虛擬助理是否能為「語音助理」帶來一道新的氣象?


【AI_Column】影像式AI虛擬助理真的要來了嗎?(上)
語音助理發展至今儼然已成了「超級紅海」,但下個「藍海」在那裡呢?會是影像式AI虛擬助理嗎?接下來,第一篇就從應用場景與關鍵技術來為大家說明。

SIGGRAPH 2018 先進技術(Emerging Technologies)解析
今年電腦圖學及人機互動領域研討會「ACM SIGGRAPH 2018」,作者就官方影片裡的八個項目進行介紹,讓大家能夠了解這些產品的技術與特色。

【AI_Column】AI 邊緣運算即將掀起風潮
今年Computex & InnoVEX 2018中可以嗅出一個方興未艾的風潮,那就是邊緣運算,本文將介紹邊緣運算為何興起,以及有哪些台灣廠商已推出相應的解決方案。
【Maker玩AI】使用Google Colaboratory免費資源學AI,正是時候!
當各政府單位、學界及業界街紛紛投入AI產業中,在Maker的場域中,如何迎接這AI世代的來臨呢?本文就為大家介紹如何取得及應用免費的AI實驗場域資源「Google Colaboratory」,並利用「深度學習」模型進行影像二元分類。

【AI Column】深度學習,從「框架」開始學起
想學習深度學習技術的人,第一步通常會遇到一大堆框架(Framework)卻不知如何選擇,本文將告訴你哪些才是主流框架,協助你找出最符合自己需求的框架。


創客也可以是網紅,台灣Maker網紅大集合
Maker(創客)也可以是Youtuber(網紅)嗎?我想這應該也是一個先有雞還是先有蛋的問題。是創客佛心地分享作法才讓一堆粉絲追隨,還是為了想紅搞出一堆瘋狂的創作吸引大家的目光?我想兩者都有。不管你現在是不是Maker,就從現在開始投入Maker的世界吧

【Tutorial】OpenQCam 在ePTZ攝影機的應用
這次的文章是利用上次 OpenQCam 樹莓派迷你開源相機所衍生的應用實例【ePTZ 攝影機】,一樣也會使用到 OpenCV,希望多提供大家一些應用上的想法。
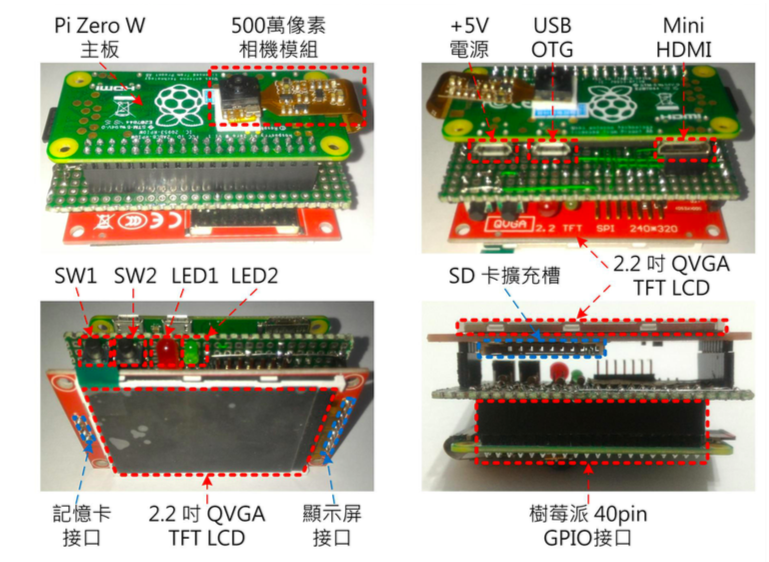
【Tutorial】OpenQCam 樹莓派迷你開源相機
本文教你利用樹莓派 Pi Zero W、500 萬素相機模組、2.2 吋 TFT LCD、OpenCV,完成迷你可愛版數位相機【OpenQCam】。
輕鬆用Intel AI PC及OpenVINO建立數位分身
一個完整的數位分身,就像真人一樣,要具有自然語言對話、豐富肢體動作和產生生動表情的能力,其中就需要用到許多生成式AI技術,包括利用語音轉文字(STT)得到問題的文字,交給大語言模型(LLM)進行文字問答,再將文字轉語音(TTS)把答案讀出,最後再配合語音自動對嘴形(Lip Sync)讓人物影像的嘴巴也能和語音同步動起來。
如何使用Intel AI PC及OpenVINO實現虛擬主播
為了使大家能更進一步理解如何實作一個簡單離線版(邊緣端)的虛擬主播,可以輸入所需文字,產生對應語音,配合閉嘴人物影片生成新的對嘴影片。接下來就分別從「推論硬體及環境建置介紹」、「MeloTTS 文字轉語音生成」、「Wav2Lip 自動對嘴影片生成」及「建置完整虛擬主播」等四大部份作更進一步說明。
如何在Google Colab上運行OpenVINO Open Model Zoo範例
本篇文章會以OMZ 影像分類(Classification) Public Pre-Trained Models為例,說明如何在Colab 上直接運行Intel Open Model Zoo。
【開箱評測】OpenVINO讓你不上網也能和Dolly聊聊天
以往在AI模型部署優化及推論部份,通常都會想到使用 Intel OpenVINO,不過大家多半只注意到它在「電腦視覺」相關的應用,殊不知自從2022.1版後就已開始加入許多「自然語言」的範例。而最近2023.0版又更加強GPU處理記憶體動態外形(Dynamic Shape)的能力,使得如生成型預訓練變換模型(GPT)這類基於轉換器(Transfomer)技術的大型語言模型能得到更好的實現。
【開箱評測】巴掌大的迷你主機也能跑出高效AI推論表現!
為了更進一步了解這類迷你主機在AI推論效能的表現,此次選用東擎(ASRock Industrial) NUC BOX-1260P作為測試機,AI推論部份則選用OpenVINO 2022.3版作為基礎工具。而測試項目則使用OpenVINO Notebooks中最新的物件偵測「Convert and Optimize YOLOv8 with OpenVINO」範例作為實測效能的分析。
讓你也能成為智能影音分析大師 – Intel OpenVINO DL Streamer
Intel OpenVINO Toolkit 2022.1版在今年作出不少重大變革,本文將帶大家認識DL Streamer架構及安裝技巧,以及分析DL Streamer的表現,帶領大家深入了解OpenVINO這項好用的工具。
如何在Windows安裝Linux(WSL2+Ubuntu)及Docker來執行OpenVINO和DL Streamer
隨著Win11上市,WSL2也迎來較大幅度的更新,本文將帶著大家從零開始一步一步架設Linux開發環境並且安裝安裝Intel OpenVINO、Docker和DL Streamer進行練習。
有了OpenVINO 2022 PrePostProcessor APIs,影像推論就更有效率了!
OpenVINO 2022.1版本中,透過PrePostProcessor (PPP) APIs使得推論效能有明顯的改善,當使用iGPU來推論時,其效能更大幅超越CPU和神經運算棒(NCS2, Myriad X)。PPP的特色及優勢為何?且看本文介紹。
OpenVINO 2022大改版 讓Edge AI玩出新花樣
Intel開發的電腦視覺與深度學習應用的開發套件OpenVINO自2018年問世以來,造福了不少AI應用的開發者,而今年發布的2022.1版是這三年半來最大幅度的更新,本文將簡單盤點此次更新的幾大要點。
【先試再上】Intel DevCloud助你雲端驗證AI佈署,免費!
Intel 推出的免費雲端開發平台「DevCloud」,不僅提供OpenVINO讓使用者進行AI推論程式開發及測試,更協助評估佈署後效能,讓使用者可以更精準地採購所需設備。本篇文章將帶領讀者深入了解這項免費工具。
小孩才作選擇,AI推論速度及準確度我全都要 ─ OpenVINO Post-Training Optimization Tool簡介
身為人工智慧(AI)從業人員,如何兼顧模型的速度和準確度是一大挑戰。利用INTEL OpenVINO推出的「Post-Training Optimization Tool (POT)」能有效解決,一起來了解如何使用吧。
不用寫程式也能玩轉深度學習模型 ─ OpenVINO™ DL Workbench圖形化介面工具簡介
DL Workbench(Deep Learning Works Benchmark)一個方便的網頁式圖形化介面工具,讓非程式設計背景的社群夥伴都可以輕鬆使用,一起來看看其使用流程以及範例操作吧!
串流影片分析慢吞吞?看OpenVINO™ DL Streamer如何加速效率
當深度學習技術遇到視訊檔案或串流影片時,逐格(by Frame)影像分析就變得很沒效率,有辦法提升嗎?可試試用DL Streamer來加速喔。
如何利用Docker快速建置OpenVINO™ Toolkit開發環境
為解決安裝步驟系統無法運行,OpenVINO推出Docker安裝方式,輕鬆搞定安裝及執行問題,本篇簡單說明Docker是什麼?以及相關的工作環境以及範例說明。
【OpenVINO™教學】土炮智能機器手臂之視覺系統
機器手臂早已成為自動化工廠中不可或缺的最佳幫手,本篇文章將會說明如何使用Intel OpenVINO™+RealSense™自製機器手臂之視覺系統。
搭配OpenVINO與OpenCV 電腦視覺一點都不難
處理電腦視覺只能靠 OpenCV 單打獨鬥嗎?OpenVINO 開源工具其實強化了「深度學習」技術在電腦視覺的相關應用,有效搭配兩者將能提升執行效能。
【OpenVINO™教學】土炮體感控制系統
微軟推出的Kinect雖然在2017年停產,卻也讓體感互動更上一層樓,但其實想要自製體感控制系統也不無可能,本篇文章將會說明,如何使用Intel OpenVINO結合OpenPose預訓練模型來完成「土炮體感控制系統」。
【OpenVINO™教學】土炮影像實例分割型智慧監控系統
過去要做到精準的物件偵測,不僅需要高難度的技術更需要專家協助,但運用OpenVINO能讓「語義分割」及「實例分割」的開發難度大大降低,本篇文章將會分享「實例分割型智慧監控系統」的概念驗證實驗。
【AI_Column】運用 Intel OpenVINO 土炮自駕車視覺系統
本文除了介紹影像語義(像素級)分割原理、OpenVINO基本架構,更以如何建構自駕車視覺系統為例,介紹如何應用OpenVINO中預先訓練與優化的模型來進行場景辨識。
【Edge AI專欄】 邊緣端小語言模型崛起,開發板跟上了嗎?
本文將幫大家盤點一下常見的19個廠商提供的37種小語言模型,16種 MCU / MPU / SoC 等級 LLM 開發板解決方案,讓大家未來在開發相關應用時能有更多選擇。
【Edge AI專欄】 單晶片也能輕鬆玩AI影像辨識?難道土耳其大叔來了?
本篇文章將分享一下只用單晶片(MCU)等級晶片也能運行微型機器學習(TinyML)類型的人工智慧應用,如聲音辨識、電腦視覺、時序預測等。
【Edge AI專欄】從CES 2024 看Edge AI及TinyML最新發展趨勢
今年CES的主軸:人工智慧、數位健康、永續發展、汽車科技、遊戲與電子競技、擴增/虛擬實境、智慧城市、智慧家居等領域最新技術。為了讓大家更了解在邊緣智慧(Edge AI)和微型機器學習(TinyML / MCU AI)的最新趨勢,本篇文章簡單盤點了此次四十多項較具代表性的產品讓大家認識一下。
【Edge AI專欄】AI Maker世代即將展開 – 大家跟上了嗎?
這一年來,遠在天邊(雲端)的技術迅速落地(邊緣),高階手機(Mobile)、單板微電腦(SBC)甚至高階單晶片(MCU)也有機會玩AIGC相關應用,這似乎意味著「AI Maker世代」即將到來。本篇文章,幫大家整理了有哪些硬體、軟體相關技術資源可用,還有哪些創意、應用可能成為AI Maker的新寵。
【Edge AI專欄】TinyML (MCU AI) 運行效能誰說了算?
6月27日,公佈了Tiny v1.1測試結果報告,其中包括了台灣新唐科技(Nuvoton)及臺灣發展軟體科技(Skymizer)提交的亮眼成果。本篇文章會來幫大家解讀一下這份報告,讓大家能更了解未來單晶片運行AI的方向及可行性。
【Edge AI專欄】從Embedded World 2023看Edge AI及TinyML最新發展趨勢
2023年嵌入式世界展會在德國紐倫堡順利落幕了,在展會中自然也包括了Edge AI及TinyML的相關應用,本文會根據此展會中所展示的項目,帶大家一同看Edge AI及TinyML的發展趨勢。