作者:許哲豪 Jack
最近在FarmBot Taiwan User Group (FBTUG)總召哈爸(許武龍)的號召下,各路高手紛紛跳坑,希望有機會發展出開源小型蔬果(蕃茄、甜椒、小黃瓜、咖啡豆等等)的採收機器人,以改善農民缺工問題及提升農業自動化技術。
採收機器人(HarvestBot)主要包含幾大部份,自走車(導航、定位)、機器視覺(果實空間XYZ位置、果實成熟度)、機器手臂(含爪子摘取、置放)及系統整合控制等部份。上一篇「【智慧農業】採收機器人之視覺技術現況」已初步整理了一些影片,這次再接再厲把關於採收時夾爪的設計整理如下,希望能提供大家一些參考,相關說明僅個人透過影片觀察而得,若有說明不對的地方再請大家不吝指教。
從下面影片中可了解到,由於不同的蔬果外型、尺寸、可承受夾爪壓力差異頗大,且果實和植株連接的強度(梗的粗細)也不同,因此採摘方式可能會採用旋轉扯斷、直接拉(夾)斷、剪斷、燒斷甚至鋸斷。接著,就依不同類型的蔬果所用到的夾爪種類進行說明。
一、易受傷的草莓
由於草莓連接的梗較細且軟,所以可採用剪斷或直接扯斷的方式摘取草莓。
1. 東京機器人展採草莓機器人 (2011):
採用小型氣壓缸二指式夾爪,在夾住草莓的蒂頭時順便剪斷,在不碰觸草莓情況下,便可摘下草莓。

(圖片來源:OmniXRI提供)
2. Octinion草莓採收機器人 (2017):
這款夾具共有三個爪子,是用3D印表機列印而成,其結構有很多空洞,可避免爪子抓到草莓本體時會壓壞。摘取時模擬人手動作,先包住草莓,再向上折斷蒂頭,取下草莓。

(圖片來源:OmniXRI提供)
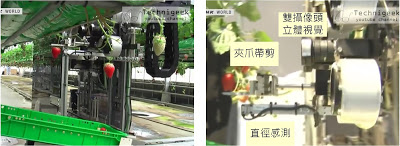
3. Strawberry Picking Robot (2013):
這款夾具也是採用氣壓缸二指式夾爪,夾住草莓蒂頭時順便剪斷,剪下後另外以光電感測器量測尺寸,順便依大小做分級。
(圖片來源:OmniXRI提供)
二、小蕃茄
小蕃茄的梗略硬,不會很粗,所以可用一般剪刀或刀片就可切斷甚至可直接拉斷。
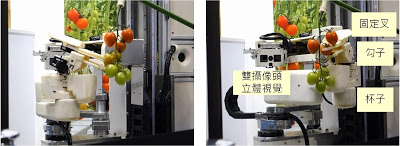
Panasonic採小蕃茄機器手 (2017):
這款夾具在採收前先用一叉子把小蕃茄壓住,再用一金屬片把梗勾斷,讓小蕃茄直接掉入下方的杯子中,完成採收動作。
(圖片來源:OmniXRI提供)
三、小黃瓜
小黃瓜的梗不會太硬亦不會太粗,所以可用一般剪刀或刀片就可切斷。
Cucumber Harvesting Robot:
這款夾具是採用氣壓缸二指式夾爪,夾住後是採用雷射燒斷連接的梗。切斷後再依序排入收集箱中。

(圖片來源:OmniXRI提供)
四、核心空空的彩椒
彩椒的梗又硬又粗,雖不到木質化程度,但切斷時仍需較大力量,刀具選用時需採較不易磨耗的材質,以免不利切不斷。另外由於彩椒是空心的植物,所以抓取時必須控制力道,以免捏壞彩椒。
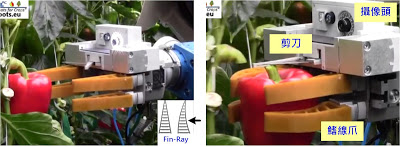
1. Wageningen University Sweet-Pepper Harvesting Robot:
這款夾具採用鰭線(Fin-Ray)夾爪設計,當受的特定方向外力時,可自動變形,形狀如同魚的背鰭一般,因此得名。當用此夾爪夾住彩椒時,再用較利的剪刀從上方剪斷,若無法完全切斷時,機器手將會直接把它扯斷。
(圖片來源:OmniXRI提供)
2. 歐盟甜椒採收機器人 (2018):
這款夾具並不用來夾彩椒,而是用一個壓輪先壓住彩椒上方的梗,再以一鋒利的刀快速由上往下切。切斷後會直接掉落在塑膠爪子上,避免碰撞和壓壞彩椒。

(圖片來源:OmniXRI提供)
五、蘋果
由於蘋果較硬所以可以用夾具直接夾持,只要不要傷到水果表面即可。而其梗不會太粗,可直接旋轉扭斷或者用剪刀切斷。
1. Washington State University Apple Harvesting Robot:
這款夾具採用三個舵機拉線,讓三隻爪子能像手指一樣彎折抓住蘋果,再將機械手旋轉並向後拉扯,直接拉斷再置於指定位置。

(圖片來源:OmniXRI提供)
2. GoodFruitGrower Robotic apple picker:
這款設計沒有夾具而是直接用高壓吸塵器將蘋果吸入,並直接通到儲存的箱子中。

(圖片來源:OmniXRI提供)
3. ACFR Robotic Arm Picking Apples:
這款夾具是採用五組軟式氣動夾爪,當充氣時夾爪可抓取蘋果,反之可釋放掉。其爪子為可塑性其高的材質構成,因此不會傷到蘋果的表面。摘取時亦是模仿人手動作,轉動後再向下拉扯使蘋果脫離。

(圖片來源:OmniXRI提供)
4. FF Robotics:
這款機器手臂是伸縮臂型,伸出手臂時會順便把三隻爪子閉合,用來抓取蘋果,而向後退時爪子自動打開,此時需有一個布籃承接落下的蘋果,接著再用布管將蘋果輸送到後方。

(圖片來源:OmniXRI提供)
六、有彈性的柳橙
柳橙和蘋果一樣是實心水果可以用夾具直接夾持,且柳橙本身有彈性,表面很粗糙,所以梗可直接旋轉扭斷或者用剪刀切斷。
Michael Hannan Orange Harvesting Robot:
這款夾爪很直接,就是三根直的金屬板,當閉合時夾爪會略向內縮,確保柳橙不會掉落。

(圖片來源:OmniXRI提供)
七、大蕃茄類
大蕃茄的梗略粗但不硬,所以只需一般剪刀或刀具即可切斷連接梗,但果實本身較軟,所以夾爪不能太用力,以免捏壞蕃茄。
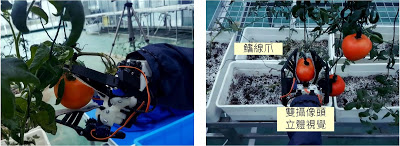
1. China Robot Harvest:
這款夾爪也是採用鰭線夾爪,可避免夾壞蕃茄。另外機器手也是採取旋轉後向下扯斷的作法。
(圖片來源:OmniXRI提供)
2. Bo Wu Tomato picking Robot:
這款設計不算有夾爪,而是直接剪斷梗,讓蕃茄掉落到網子中。所以外表看似夾爪的部份實際上是一把剪刀。

(圖片來源:OmniXRI提供)
小結
綜合上述設計說明,共列舉出十多種不同的夾爪案例,雖然無法適合所有水果及農作物,但應可幫助大家多增加一點想法,來設計更符合需求夾爪,甚至設計成可更換式的夾爪。
(本文同步發表於歐尼克斯實境互動工作室、原文連結;責任編輯:賴佩萱)

主持歐尼克斯實境互動工作室(OmniXRI):http://omnixri.blogspot.com
Edge AI Taiwan邊緣智能交流區:https://www.facebook.com/groups/edgeaitw/
- 【Arduino UNO Q專欄04】人臉偵測開關燈具 - 2026/06/22
- 【Arduino UNO Q專欄03】板載點矩陣LED應用 - 2026/06/08
- 【Arduino UNO Q專欄02】軟體開發初體驗 - 2026/05/21
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


