
自駕車突破以往的運輸方式,打造全新經濟模式
不需要人類操作即能感測環境與導航的自駕車是全球各國、各車廠投入資金研究的領域之一,透過人工智慧、計算機、大數據分析等智慧科技,高速迎向未來。
【CAVEDU講堂】使用Intel NCS 2及OpenVINO在樹莓派上跑自駕車
本篇文章分享CAVEDU 團隊使用樹莓派結合第二代的 NCS 實作自駕車, 並搭配Intel的AI加速工具OpenVINO 來實現。
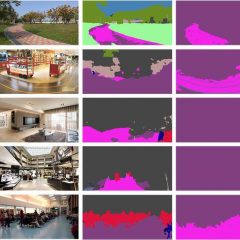
【AI_Column】運用 Intel OpenVINO 土炮自駕車視覺系統
本文除了介紹影像語義(像素級)分割原理、OpenVINO基本架構,更以如何建構自駕車視覺系統為例,介紹如何應用OpenVINO中預先訓練與優化的模型來進行場景辨識。