儘管模型參數不斷攀升,但 LLM 始終無法擺脫「幻覺」與「邏輯斷層」。AMI Labs 的出現,正是為了填補這塊拼圖:其理論核心不再是「文字的排列組合」,而是「世界模型(World Models)」,並為 AI 的未來定下了從對話走向行動的主基調。
在 2024 年底,矽谷與學界開始出現一種集體焦慮。儘管模型參數不斷攀升,但大型語言模型(LLM)始終無法擺脫「幻覺」與「邏輯斷層」。其根本原因在於:LLM 是基於機率統計的文字預測機器,它們「聽過」重力,卻從未「感受過」重力。
這種缺失導致 AI 在處理複雜任務時顯得力不從心。當用戶要求 AI 「幫我訂一張最合適的機票」時,傳統 LLM 會列出步驟,卻無法應對支付驗證失敗、網頁改版或突如其來的航班取消。因為對 LLM 而言,世界是一串 Token(代幣化字符),而非一個充滿因果律的實體空間。
AMI Labs (Advanced Machine Intelligence Labs) 的出現,正是為了填補這塊拼圖。他們提出的理論核心不再是「文字的排列組合」,而是「世界模型(World Models)」。
AMI Labs是由「AI 教父」、圖靈獎得主、前Meta首席AI科學家楊立昆(Yann LeCun)創立的AI研究公司。儘管AMI Labs成立不久,但在 2025 年至 2026 年間的爆發式成長,已使其迅速跨越了理論階段,在資本與實務應用領域樹立了多項關鍵里程碑。

AI教父、AMI Labs共同創辦人Yann LeCun(source)
在資本市場與產業生態位上,AMI Labs 完成了高達 10.3 億美元(約新台幣 330 億元)的創紀錄種子輪融資。這筆資金由新加坡淡馬錫控股(Temasek)、Nvidia、Bezos Expeditions(亞馬遜創辦人貝佐斯的家族辦公室)等頂尖機構共同注資,將公司投前估值推升至 35 億美元。這不僅僅是金額的突破,更代表了硬體端(Nvidia)與物流供應鏈(Bezos)對其「真實世界操作能力」的深度背書。
AMI Labs 挑戰 LLM的理論依據

在人工智慧的演進史中,AMI Labs 的崛起標誌著一個關鍵轉折:AI 正在從「單純文字生成」進化為「真實世界理解」。不同於主流LLM透過增加參數、堆疊算力來強化效能,AMI Labs 的核心願景在於打破「文字進、文字出」的黑盒模式,從認知架構的根源進行重組。
以下詳述 AMI Labs 挑戰現行 LLM 主導地位的四大理論支柱:
1.從「機率預測」轉向「世界模型」 (World Models)
現有的 LLM(如 GPT-4)本質上是基於統計學的「下一個 Token 預測器」。儘管它們掌握了驚人的語言規律,卻對物理世界的因果律(Causality)缺乏真實感悟。相較之下,AMI Labs 引入了物理感知的「世界模型」,目的是要讓AI 不再僅僅學習單字之間的機率鏈結,而是學習「動作後的狀態變化」。
理論出發點的不同,導致兩者的實踐差異:以「預送快遞」指令為例,傳統 LLM 會撰寫一份文辭精美的計畫書;然而,具備世界模型的系統則會預判物流系統的 API 反應、地理空間限制與隱形成本,並預先模擬動作後的實際結果。
》延伸閱讀:讓機器也懂「趨吉避凶」:打造AI內在的世界模型 (World Model)
2.LAM 結構:語義與執行的解耦合

支撐AMI Labs 受關注的另一關鍵,在於其將「語義理解」與「動作執行」進行分離,這即是其核心架構——大型動作模型(Large Action Model, LAM),它有兩大特色:
- 動作原語 (Action Primitives): 研發團隊將人類在數位世界(點擊、滑動、輸入)與現實世界(感測、移動)的行為,抽象化為一套標準化的「動作語言」。
- 神經符號結合: 透過神經網路處理人類模糊且多義的意圖,再利用符號邏輯(Symbolic AI)確保執行動作的精準度。這種混合架構能有效避免 LLM 常見的「幻覺」現象,防止 AI 執行錯誤或無效的指令。
| 特點 (Feature) | 大語言模型 (LLMs) | 大動作模型 (LAMs) |
|---|---|---|
| 功能 | 語言生成 | 任務執行與完成 |
| 輸入 | 文本數據 | 文本、圖像、指令等 |
| 輸出 | 文本數據 | 行動、文本 |
| 訓練數據 | 海量文本語料庫 | 文本、程式碼、圖像、動作數據 |
| 應用領域 | 內容創作、翻譯、聊天機器人 | 自動化、決策、複雜交互 |
| 優勢 | 語言理解、文本生成 | 推理、規劃、決策、實時交互 |
| 劣勢 | 推理能力有限、缺乏行動能力 | 仍在開發中、涉及倫理考量 |
3.主動感知與環境回饋 (Closed-loop Control)
現行 LLM 多處於「開迴路」(Open-loop)模式:用戶輸入、模型回覆,互動即宣告結束。AMI Labs 則強調建構「閉迴路」(Closed-loop)系統,賦予 AI 持續監控與自我修正的能力,若在執行任務的第一步遭遇挫折,會根據環境反饋自動修正後續計畫,而非停滯不前等待用戶的下一個 Prompt。
4.具身智慧 (Embodied AI) 的虛擬化應用
AMI Labs 的核心理論深受具身智慧的啟發,主張真正的智能並非產生於靜態的資料運算,而是在與環境持續的「交互」中淬煉而成。即便在不涉及實體機器人硬體的數位領域,該理論依然能透過「虛擬具身」(Virtual Embodiment)的方式實現轉化。
》延伸閱讀:Voyager: An Open-Ended Embodied Agent with Large Language Models
在此架構下,複雜的作業系統、瀏覽器及各類專業軟體不再只是工具,而被視為 AI 在數位世界中探索與感知空間的「身體」。這種概念將 AI 從螢幕後的觀察者推向了執行者的位置,使其能夠直接在數位環境中感官化地理解每一項操作的物理意義與因果邏輯。
在知識獲取的路徑上,這種模式徹底顛覆了傳統 LLM 的範式。不同於以往模型僅能依賴被動、靜態且缺乏即時性的「死去紀錄」進行訓練,AMI 系統所獲得的是一種隨時變化的「動態經驗」。
從理論到落實
要證明一個理論「比 LLM 更有效」且「現實可行」,必須從架構效率、錯誤率控制與實際應用產出三個維度來檢視。AMI Labs目前已從理論進入到原型驗證與大規模產業部署的階段。以下是其證明「有效性」的具體路徑與初期成果:
現實可行性的關鍵:JEPA 與世界模型
在技術路徑的重構上,AMI Labs 展現了極具野心的策略:他們並非完全拋棄現有的語言模型技術,而是將 LLM 從運算核心「降級」為輔助性的語音或指令介面。真正的核心大腦則改為採用 JEPA(Joint-Embedding Predictive Architecture,聯合嵌入預測架構)。這種架構上的轉向,從根本上解決了傳統語言模型在實務執行時的兩大致命傷,讓 AI 跨越了從「說客」到「職人」的鴻溝。
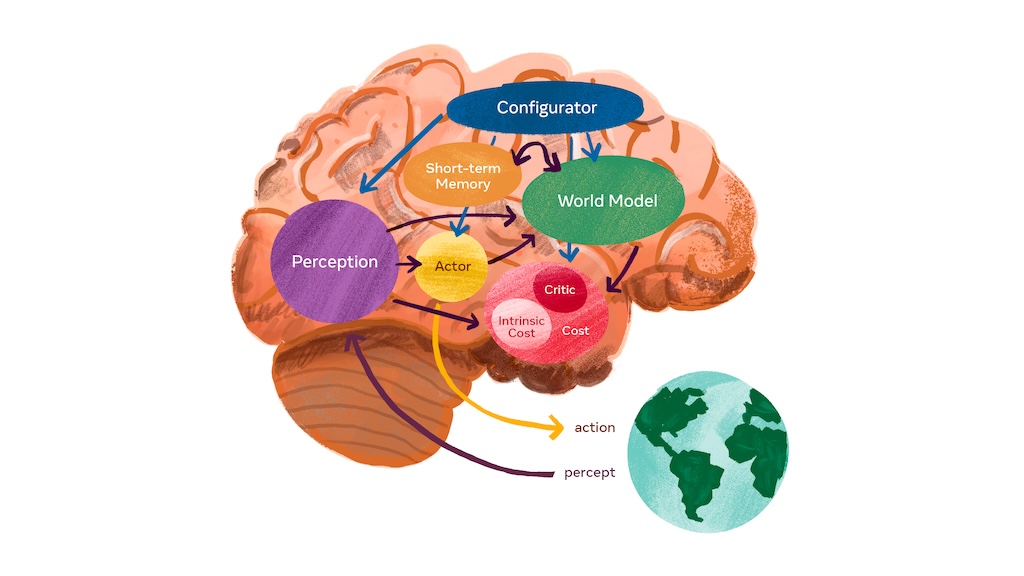
source:Meta AI部落格文章,Yann LeCun闡述了讓人工智慧系統像動物和人類一樣學習和推理的願景
首先,這種轉變帶來了運算效率的數量級提升。傳統 LLM 的運作模式如同試圖預測每一點像素或每一個單字的精密畫家,計算量極其龐大且充斥著無意義的環境噪音。相比之下,基於 JEPA 的 AMI 世界模型則像是一位經驗豐富的工程師,只在「抽象空間」內進行關鍵預測。
它會精準地計算與任務直接相關的特徵,例如在執行「開門」動作時,系統僅專注於門把的轉動與受力,而自動忽略背景中閃爍的燈光或流動的雲朵。這種過濾冗餘資訊的能力,使模型能以極低的算力執行更為複雜且長程的行為規劃。
》延伸閱讀:What Is JEPA? Joint Embedding Predictive Architecture
更為關鍵的是,AMI 實現了從「預測文字」到「預測後果」的認知進化。透過所謂的「動作條件化」(Action-conditioned)模擬機制,AI 在正式執行任何動作前,會在內部虛擬空間先行「演練」預期的物理結果。如果模擬顯示該路徑會導致系統崩潰或違反安全規則,模型會立即排除該選項並重新尋求最優解。
這種具備自我預驗證的機制,證明了其在工業控制與醫療診斷等容錯率極低的現實場景中,遠比會「一本正經胡說八道」且缺乏結果感知的傳統 LLM 更加可行且安全。
初期成果與實證
在具體應用場景中,AMI Labs 的技術已開始展現出超越傳統模型的執行潛力:
- 醫療自動化(與 Nabla 合作): AMI Labs 的首個戰略合作夥伴為醫療科技公司 Nabla。目前的實驗數據顯示,該系統能夠從嘈雜、混亂的診間對話中精準抽離物理行為事實,並將其轉化為可執行的醫療決策動作。在決策的可靠性與邏輯連貫性上,該系統表現優於單純進行文字總結的 GPT 系列模型。
- 影片物理規律辨識:Yann LeCun 指出,他們的原型系統已能識別影片中「不符合物理規律」的異常事件。這是 AI 邁向「機器常識」的重要一步,未來將能有效減少自動駕駛系統或工業機器人在協作過程中的致命判斷錯誤。
- 工業流程控制: 目前 AMI 已在新加坡等區域據點,測試用於監控複雜工業感測器數據的世界模型。該模型具備在雜訊極大的動態環境中預測設備疲勞與機械故障的能力,其目標是提供精準的實體介入建議,而非僅僅是停留在文字層面的風險預警。
結語
AMI Labs 對於LLM提出的挑戰核心非常明確:「會說話並不代表會做事」。初期成果顯示,在處理「不確定性」與「物理交互」的任務時,AMI 的世界模型比傳統 LLM 節省了超過 40% 的計算資源,且在複雜任務的成功率上顯著超越了純文字驅動的方案。
儘管這類系統目前仍面臨現實世界動作數據稀缺的挑戰,但這股轉向「世界模型」的浪潮,已然為 AI 的未來定下了從對話走向行動的主基調。

- 機器人開發環境邁入「標準化、開源化、端對端」新時代 - 2026/07/21
- 人形機器人站上手術檯動刀的最後一哩路 - 2026/07/13
- 【產業剖析】全球機器人生態系競合趨勢 - 2026/06/22
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


