
恩智浦攜手大聯大世平、成大推動Edge AI機器人應用開發
恩智浦半導體再度攜手半導體零組件及研發支援通路商大聯大世平集團,參與「Race to Robot — NXP Edge AI 應用工作坊」,以「從構想到開發」為題…
【當Physical AI遇上Agentic AI】下一波AI革命:Embodied Agent!
當Agentic AI遇上Phsical AI,AI技術正從數位世界邁向物理世界,從軟體代理(Software Agent)進化為具備感知、推理與行動能力的 Embodied Agent。
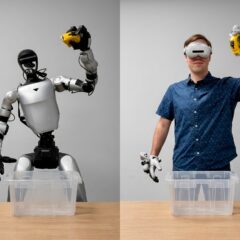
機器人開發環境邁入「標準化、開源化、端對端」新時代
從Isaac Teleop的直覺操控,到LeRobot v0.6.0的資料與API統一,再到GR00T N1.7 的強大具身智慧,最後在DGX Spark上實現快速閉環——這套工作流程成功構建了一座連接虛擬與現實、連接頂尖硬體與開源生態的橋樑。

需求發酵 陪伴型機器人2030年產值估計可達11億美元
市場研究機構TrendForce的最新機器人產業觀察指出,陪伴型機器人除了早期由日本主導的長照陪伴、療癒設計,近年已拓展至真人化互動和情感陪伴…
訓練方法大突破:MimicDroid讓人形機器人看影片學習動作!
由UT Austin提出的 MimicDroid,首創了完全不需要機器人遠端操作資料的端對端 ICL 訓練框架,而是直接把「人類日常活動影片(Human Play Videos)」當作唯一的訓練資料源,這技術是如何實現的呢?