


- 單元
- 技術導讀
- 教學文

CSP提高資本支出 2026年AI server出貨年增上看31%
根據市場研究機構TrendForce最新AI server產業研究,因應AI基礎建設需求高漲,估計2026年全球九大雲端服務供應商(CSP)總資本支出將年增約90%。

AI建築機器人走進工地:Built Robotics如何改變傳統施工模式
美國新創公司Built Robotics近年來將AI、自主導航與重型工程機械結合,讓原本需要由駕駛員操作的挖土機、打樁機等設備,具備自主施工能力。
AI將如何改寫EDA競爭版圖?
將生成式AI、代理式AI及相關技術導入EDA已成為產業主流,各家供應商的共同方向都是讓AI從提供建議的「副駕駛」,進一步成為能理解目標、呼叫工具、執行多步驟流程並驗證結果的工程代理。

NVIDIA擴充Agent Toolkit 顛覆全球工程、設計與產品打造方式
NVIDIA宣布擴充工程專用的NVIDIA Agent Toolkit,新增NVIDIA PhysicsNeMo與CUDA-X函式庫,作為代理就緒的工具與技能,革新全球產品設計與開發的方式。

送餐也將無人化:AI配送從洛杉磯到澳洲黃金海岸
AI與機器人技術快速發展,「送餐機器人」被視為最有機會率先改變民眾日常生活的應用之一。相較於仍在測試階段的自駕車,人行道配送機器人的運行環境較為單純,配送距離通常只有數公里,因此更容易率先落地。

最新IBM報告:AI成為資安攻擊事件幕後黑手之一
IBM調查顯示,四分之一的惡意入侵造成資料外洩事件與AI技術有關,數量比去年增加56%,造成經濟損失平均達600萬美元,比一般資料外洩事件造成的平均損失高出約100萬美元。

台灣搶攻後矽時代半導體關鍵技術
當矽材料接近物理極限,下一個能支撐高密度、低功耗運算的電晶體通道材料會是什麼?在眾多候選技術中,所謂的「二維材料」被視為延續摩爾定律的重要解方之一。

英特爾技術驅動醫療外骨骼解決方案
因下肢受傷而無法站立或行走的患者,通常需要接受密集的臨床復健與專業物理治療師的協助。此類醫療照護透過反覆訓練肢體功能,協助大腦重新學習控制肢體運動,最終幫助患者重新站立並恢復行走能力。
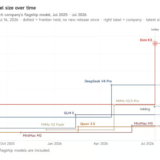
月之暗面Kimi K3模型技術觀察
北京月之暗面(Moonshot AI)在7月份發佈其最新的大語言模型Kimi K3,該模型因為有2800B(或寫2.8T,T為Trillion,台灣稱為2.8兆,大陸稱為2.8萬億)的龐大參數量而受到矚目。

恩智浦攜手大聯大世平、成大推動Edge AI機器人應用開發
恩智浦半導體再度攜手半導體零組件及研發支援通路商大聯大世平集團,參與「Race to Robot — NXP Edge AI 應用工作坊」,以「從構想到開發」為題…
月之暗面Kimi K3模型技術觀察
北京月之暗面(Moonshot AI)在7月份發佈其最新的大語言模型Kimi K3,該模型因為有2800B(或寫2.8T,T為Trillion,台灣稱為2.8兆,大陸稱為2.8萬億)的龐大參數量而受到矚目。

【當Physical AI遇上Agentic AI】下一波AI革命:Embodied Agent!
當Agentic AI遇上Phsical AI,AI技術正從數位世界邁向物理世界,從軟體代理(Software Agent)進化為具備感知、推理與行動能力的 Embodied Agent。

機器人開發環境邁入「標準化、開源化、端對端」新時代
從Isaac Teleop的直覺操控,到LeRobot v0.6.0的資料與API統一,再到GR00T N1.7 的強大具身智慧,最後在DGX Spark上實現快速閉環——這套工作流程成功構建了一座連接虛擬與現實、連接頂尖硬體與開源生態的橋樑。
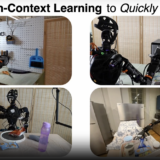
訓練方法大突破:MimicDroid讓人形機器人看影片學習動作!
由UT Austin提出的 MimicDroid,首創了完全不需要機器人遠端操作資料的端對端 ICL 訓練框架,而是直接把「人類日常活動影片(Human Play Videos)」當作唯一的訓練資料源,這技術是如何實現的呢?

微創手術需求升溫 智慧醫療機器人市場加速成長
逐漸成長的市場需求讓手術機器人成為現代手術室中不可或缺的核心平台,日本電子元件大廠村田製作所(Murata)最新發布的應用白皮書對該應用市場現況與關鍵零組件做了詳細的解析。

如何實現長時運作Agentic AI:NVIDIA NemoClaw與Nemotron
2026年,AI 領域迎來了一場根本性的典範轉移(Paradigm Shift)——長時運作(Long-Running)Agentic AI 成為新一代技術的核心主旋律。本文將剖析NVIDIA提出的兩大解方:NemoClaw及Nemotron。

TensorFlow vs. PyTorch:AI框架之戰,誰是最佳選擇?
Google 的 TensorFlow 與 Meta 的 PyTorch,代表著兩條截然不同的技術哲學,也各自影響著全球數百萬名 AI 開發者,本文將剖析兩大陣營的發展現況與優劣勢比較。
Real-to-Sim-to-Real:探討SLAM、Digital Twin與Physical AI的共生關係
沒有 SLAM,Physical AI 就如同蒙上雙眼;沒有 Digital Twin,Physical AI 的大腦便缺乏深度思考與模擬的空間;而沒有 Physical AI,Digital Twin 就只是個好看卻無法干預現實的虛擬看板。當三者結合時,便形成了一個完美的「感知-決策-執行」虛實融合閉環(Closed Loop)。

【從Vibe Coding到全能AI Agent】四大指標性AI編程與代理人工具
當Vibe Coding與AI Agent讓技術實作的門檻降到最低時,真正決定價值的不再是「如何寫出這行程式碼」,而是「如何定義核心問題」、「如何評估架構的安全性」以及「如何引導 AI 做出正確的決策」。

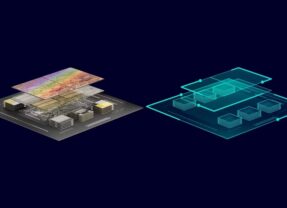
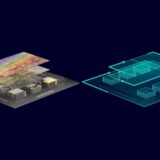
從雲端到邊緣 AI ASIC推動算力架構「專用化」
隨著AI應用進入大規模、長時間、對成本敏感的部署階段,半導體晶片在AI運算系統中形成更細緻的算力分工,為特定任務提供更高能效與更可控的營運成本。

【Arduino UNO Q專欄06】關鍵字偵測
要滿足智慧裝置的「關鍵字偵測」需求,使用 Arduino UNO Q內建Arm Cortex-A53 + Cortex-M33就可以輕鬆解決。本文就帶著大家了解如何一步步實現「關鍵字偵測」功能!

【Arm的AI世界】按步驟學習在Arm Ethos-U85上部署PaddlePaddle模型
Ethos-U85是目前效能最高的Arm Ethos NPU,可因應在邊緣端執行先進AI推論工作負載日益成長的需求,包括LLM等基於Transformer的網路。

【Arduino UNO Q專欄05】家庭氣象站
本文將藉UNO Q App Lab範例進行修改,使其可以搭配常見氣溫和氣壓感測器變成自定義感測器的家庭氣象站,若依此擴展到更多的感測器上還能實現更完整的智慧家庭應用。

【Arduino UNO Q專欄04】人臉偵測開關燈具
本文將使用Arduino UNO Q加上一般市售網路攝影機(Webcam)來控制板載LED的點亮和熄滅,未來還有機會擴展到其它家電的開關甚至調整溫濕度、照度、空氣品質等。

【Arduino UNO Q專欄03】板載點矩陣LED應用
Arduino UNO Q開發板上有很多內建的元件可直接呼叫,為了讓大家能更熟悉開發板上的元件控制,本文介紹能產生簡單顯示介面的LED點矩陣…

【Arduino UNO Q專欄02】軟體開發初體驗
Arduino 為了讓開發者更容易開發出整合式微型 AI 應用,因此推出了新的開發工具 Arduino App Lab(以下簡稱 App Lab)。本文將簡單說明如何安裝App Lab並撰寫執行一個簡單的範例程式。

【Arduino UNO Q 專欄01】 基礎硬體及軟體簡介
Arduino UNO Q雖然外觀及擴充腳位和傳統UNO R4很接近,但其核心系統採用的是雙晶片架構,使其可以兼具Raspberry Pi和傳統Arduino的用法,本文將逐一為大家介紹其中的特性。

【Arm的AI世界】運算平台開發者必看:無須硬體也能進行OpenBMC+UEFI模擬與驗證!
在現今的伺服器中,BMC不僅僅是開機時的輔助元件,更是整個平台的控制中樞。這篇文章將帶您了解如何將BMC與韌體模擬整合至持續整合(CI)流程,以加速平台啟動(bring-up)、測試,以及開發人員上手的效率。
【Arm的AI世界】運用ExecuTorch與Arm SME2加速裝置端機器學習推論
這篇文章將探討ExecuTorch和Arm SME2如何為互動式影像分割等行動端應用場景帶來速度更快、回應更流暢的AI體驗。
Windows PC上安裝PicoClaw最基礎實務
PicoClaw雖然很大程度是為了推展SiPEED公司的硬體而提出,但PicoClaw支援多種晶片與作業系統,其中也包含x86 CPU與Windows,所以也可以把PicoClaw安裝在一般電腦上,以下我們簡單快速說明安裝與設定。