在當前工業 4.0、自主無人系統(Autonomous Systems)以及機器人學急遽發展的浪潮中,全球科技巨頭與研究機構正將目光投向一個核心命題:如何讓數位世界的智慧與物理世界的實體進行深度無縫的融合?過去,人工智慧(AI)大多局限於雲端數據中心,處理著文字、語音、影像等二維資訊;而數位雙生(Digital Twin)也多被視為螢幕上靜態或半動態的 3D 視覺化儀表板。
然而,隨著「具身智能(Embodied AI / Physical AI)」概念的興起,以及空間計算(Spatial Computing)技術的成熟,這種邊界正在快速模糊。在這個大融合的時代中,有三項技術共同構築了虛實融合系統(Cyber-Physical Systems, CPS)的黃金三角,它們分別是:SLAM(同時定位與建圖)、Digital Twin(數位雙生)、以及 Physical AI(物理人工智慧 / 具身智能)。
本文將深度解析這三項關鍵技術的定義、技術定位、以及它們如何交互運作,並透過系統化的比較與架構分析,展示這三者如何共同驅動下一代智慧製造、無人駕駛與人形機器人的發展。
一、 技術核心定義與其獨特技術定位
要理解這三者的協同效應,首先必須釐清各自在科技生態鏈中所扮演的獨特角色與定位。
1. SLAM(Simultaneous Localization and Mapping):空間幾何與邊緣感知的起點
SLAM(同時定位與建圖)是一項本質上屬於邊緣端感知與空間幾何計算的技術。當一個移動機器人、無人機或穿戴式設備置身於一個未知的、沒有全球定位系統(GPS)訊號的環境中時,它必須解決兩個同時發生的問題:「我在哪裡?(定位)」以及「我周圍的世界長什麼樣子?(建圖)」。
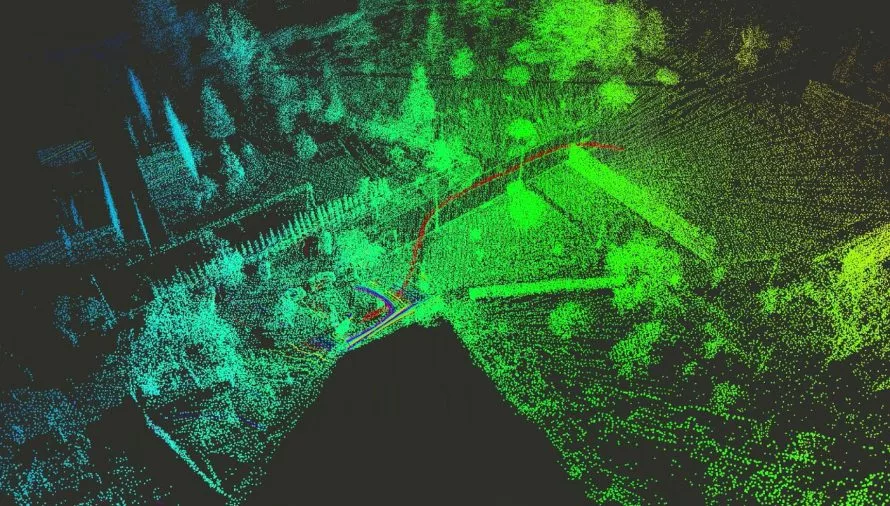
SLAM 透過融合多種感測器(如光達 LiDAR、深度相機 RGB-D、慣性測量單元 IMU 等)的數據,利用擴展卡爾曼濾波(EKF)、因子圖優化(Factor Graph Optimization)以及光束法平差(Bundle Adjustment)等數學演算法,在微秒級的時間尺度內計算出設備的精準運動軌跡與周遭環境的幾何結構。
》技術定位:現實世界到數位空間的即時轉譯器與幾何通道。它不具備長期的策略決策能力,但提供了不可或缺的即時空間狀態。
2. Digital Twin(數位雙生):高動態的虛擬大腦與時空模擬器
Digital Twin 則是位於雲端、邊緣端或混合架構中的全方位虛擬複製體。它不僅僅是物理實體的 3D CAD 模型,更是一個活生生的、擁有時間軸的數位生命體。它透過廣泛佈署的物聯網(IoT)感測器、物理引擎(如 Nvidia Omniverse, PhysX)以及歷史大數據,完整複製了現實世界中資產、流程或系統的物理狀態、熱力學特性、機械磨損甚至是流體力學行為。
數位雙生的核心價值在於「反事實推理(Counterfactual Reasoning)」與「預測性維護」。它可以在虛擬世界中以比現實快上百倍的速度進行「What-If」模擬——如果提高產線速度會發生什麼事?如果零件在特定高溫下運作多久會疲勞?
》技術定位:數據的匯聚中心、物理定律的模擬器與記憶庫。它擁有全域的視角與深厚的預測能力,但缺乏直接干預現實世界的肉體。
3. Physical AI(物理人工智慧 / 具身智能):具備肉體與物理理解力的執行實體
Physical AI(又稱具身智能 Embodied AI)是人工智慧走向物理世界的終極型態。不同於傳統大語言模型(LLM)或生成式 AI 只在虛擬環境中生成文本或圖像,Physical AI 是將多模態大模型(如VLM)與底層的物理控制演算法、強化學習(Reinforcement Learning)相結合,注入到具有物理實體(如人形機器人、四足機器人、自動駕駛車、智慧工業機械臂)的載體中。
Physical AI 的核心在於它「理解物理定律」並能「操作物體」。它明白重力、摩擦力、物體的質地(如玻璃杯是易碎的,海綿是可壓縮的),並能自主規劃出最符合當前環境的行為指令。
》技術定位:物理世界的直接行動者與主動探索者。它是大腦的實體化身,負責將數位世界的決策轉化為現實中的物理作功(Mechanical Work)。
以下從技術本質、核心硬體、運作時延等多個維度,對這三項關鍵技術進行橫向對比:
| 比較維度 | SLAM (同時定位與建圖) | Digital Twin (數位雙生) | Physical AI (具身智能) |
|---|---|---|---|
| 技術本質與核心 | 三維幾何計算、多感測器融合與邊緣端空間定位。 | 高精度虛擬複製體、物理引擎模擬與全生命週期數據匯聚。 | 物理世界互動、多模態感知大模型、強化學習與行為決策。 |
| 技術定位的角色 | 系統的「眼睛與空間平衡感」,負責理解當前幾何結構。 | 系統的「後方修煉場與記憶庫」,負責全域模擬與預測。 | 系統的「雙手雙腳(肉體)」,負責在現實世界執行作功。 |
| 主要處理對象 | 點雲數據、特徵點、軌跡矩陣、環境幾何地圖。 | IoT 即時數據串流、CAD 3D 模型、材料力學與熱力學參數。 | 神經網路權重、運動控制指令、環境語義與操作物體。 |
| 核心依賴硬體 | 光達 (LiDAR)、深度相機、IMU、邊緣端處理器 (MCU/DSP)。 | 雲端伺服器、高階 GPU 叢集 (如 NVIDIA OVX)、IoT 閘道器。 | 邊緣端 AI 晶片 (如 Jetson Thor)、馬達驅動器、機器人軀體。 |
| 運作時延尺度 | 微秒級 (μs) 至毫秒級 (ms),強調極致的即時性。 | 秒級 (s) 至小時級 (h),專注於長期預測與離線模擬。 | 毫秒級 (ms) 運動控制閉環至秒級 (s) 的高層任務規劃。 |
| 對物理定律的理解 | 僅限於空間幾何與運動學,不涉及力學與能量。 | 全面模擬物理特性(如摩擦力、重力、熱傳導)。 | 將物理特性內化為互動直覺,在不確定性中調整動作。 |
二、 三者的共生關係:虛實融合的閉環架構
如果孤立地看這三項技術,它們各自都有其局限性:沒有 SLAM,Physical AI 就如同蒙上雙眼;沒有 Digital Twin,Physical AI 的大腦便缺乏深度思考與模擬的空間;而沒有 Physical AI,Digital Twin 就只是個好看卻無法干預現實的虛擬看板。
當三者結合時,便形成了一個完美的「感知-決策-執行」虛實融合閉環(Closed Loop)。以下為三者在系統中交互作用的三大核心維度:
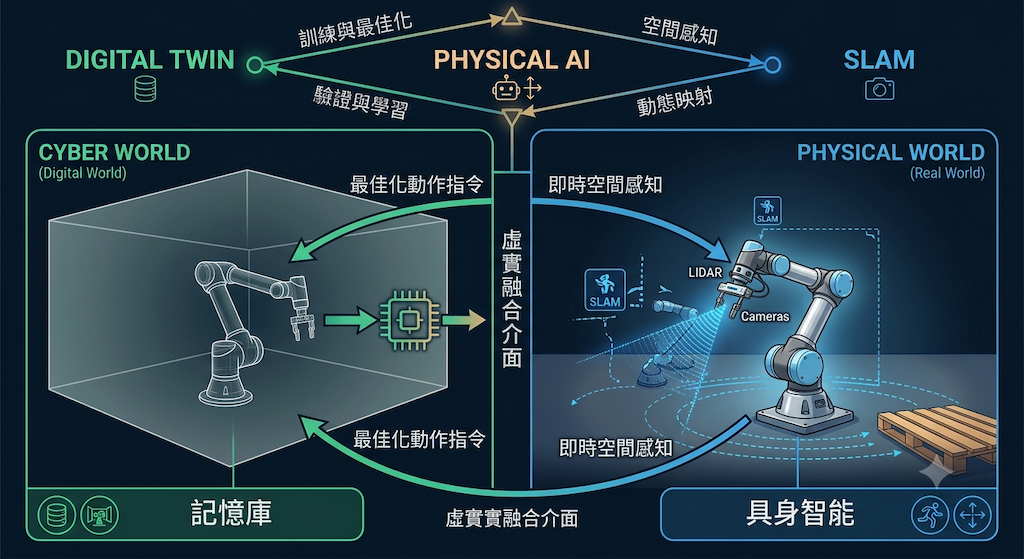
現代化智慧物流工廠中三個關鍵技術架構圖(繪圖:AI)
1. 空間幾何的即時同步(SLAM ➜ Digital Twin)
現實世界是高動態且不斷改變的。工廠裡的貨物會被搬移、道路會因施工而封閉、甚至環境光線都會改變。SLAM 在這條鏈條中扮演著「動態畫筆」的角色。當搭載著 SLAM 系統的 Physical AI 實體在環境中移動時,它所建構的稀疏(Sparse)或稠密(Dense)3D 點雲地圖,會即時透過 5G/6G 等低延遲通訊網路回傳給雲端的 Digital Twin。
Digital Twin 接收到這些幾何與語義數據後,會立刻更新其內部的虛擬場景結構。這種「幾何一致性」確保了數位雙生系統不會因為現實世界的改變而失效。
2. 模擬訓練與策略優化(Digital Twin ➜ Physical AI)
在現實世界中訓練一個 Physical AI(例如讓一個擁有 20 多個自由度的人形機器人學會流暢走路、泡咖啡、或搬運貨物)代價是極其高昂且危險的。在早期階段,機器人可能會無數次跌倒、撞壞昂貴的設備甚至傷及人類。
這時,Digital Twin 就成為了 Physical AI 的「大腦修煉場」(Sim-to-Real,虛擬到現實的遷移訓練)。在 Digital Twin 打造的超擬真虛擬環境中,物理引擎完全模擬了重力、表面摩擦力與碰撞特性。Physical AI 可以利用強化學習,在虛擬工廠中進行數百萬次、數千萬次的加速訓練。當 AI 模型在數位雙生世界中達到極高的成功率後,再將這套優化後的權重(Weights)直接部署到現實世界的實體機器人中。
3. 即時導航、避障與具身執行(Physical AI ↔ SLAM)
當 Physical AI 在真實工廠、倉庫或街道上執行任務時,它必須依賴 SLAM 提供的高頻率(通常在 30Hz 以上)位姿估計(State Estimation)來維持自身的平衡與導航。當實體機器人(Physical AI)透過 SLAM 發現前方出現了一個 Digital Twin 歷史數據中未曾出現的新障礙物(例如一個突然掉落的箱子)時,Physical AI 的邊緣端大腦會立刻做出反應,一邊避開障礙物,一邊將這個新發生的突發事件再次回報給 Digital Twin,觸發新一輪的全域路徑優化。
四、 落地應用場景:以智慧工廠為例
為了更具體地描繪這三者結合的威力,我們可以想像一座現代化的智慧物流工廠:
-
AMR 移動機器人(Physical AI 載體) 走進一個剛卸下大批貨物的混亂倉庫,它啟動車載的 視覺 SLAM 系統,在一秒內定位出自己相對於倉庫的位置,並繪製出被貨物局部擋住的新通道地圖。
-
該地圖數據立刻透過無線網路同步給工廠的中央雲端 Digital Twin 系統。數位雙生系統迅速在虛擬環境中模擬了 50 種不同的行車路線,避開擁堵點,找出最省電且最安全的配送路徑。
-
最佳路徑指令隨即下達給機器人,機器人體內的 Physical AI 控制演算法 驅動輪軸與機械臂,流暢地繞過新障礙物,精準地抓取目標貨物。
結論
在未來的科技版圖中,SLAM、Digital Twin 與 Physical AI 絕非孤立發展的垂直技術,而是三位一體的共生生態。SLAM 是探索真實世界的眼睛,Digital Twin 是運籌帷幄的數位大腦,而 Physical AI 則是切實改變物理世界的雙手。
這三者的深度融合,將使機器不再只是執行固定程式的「鐵塊」,而是成為能理解空間幾何、能預測物理未來、並具備實體自主行動能力的「具身智能實體」,這正是開啟下一代工業自動化與智慧生活的終極關鍵。
(責任編輯:歐敏銓)

- Real-to-Sim-to-Real:探討SLAM、Digital Twin與Physical AI的共生關係 - 2026/06/26
- 跨越Sim-to-Real鴻溝:韓國Movensys提出WMX ROS2軟體定義解方 - 2026/06/25
- 東擎科技發表全新工業級強固邊緣AIoT系統平台 - 2026/06/25
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


