隨著人工智慧技術從「生成式 AI(Generative AI)」快速邁向「實體 AI(Physical AI)與具身智慧(Embodied AI)」,機器人產業迎來了結構性的典範轉移。在 COMPUTEX 2026、NVIDIA GTC 2026 以及 Intel Edge Solutions Summit 2026 等全球頂尖科技盛會中,來自韓國的軟體運動控制廠商 Movensys成為業界注目的焦點之一。
Movensys 創辦人Bernard Boo-Ho Yang博士指出:「實體AI時代除了人工智慧模型本身,更需要能夠在物理世界中可靠運行的即時執行基礎設施,它也會是未來機器人系統的關鍵層。」
透過將源自麻省理工學院(MIT)機器人研究的核心技術「Soft Motion」進行演進,Movensys 成功打破傳統工業自動化的硬體壁壘。近期更藉由與研華(Advantech)、 NVIDIA 及 Intel 的深度技術整合,Movensys 提出了能讓機器人真正實現「眼到、心到、手到」的通用基礎架構,進而縮小了實體 AI 部署中Sim-to-Real Gap的落差。
跨越 Sim-to-Real 鴻溝:解決分離式架構的結構性延遲
實體 AI 的核心定義,在於機器人必須能夠自主執行視覺識別、推理並即時做出相應的機器人運動。然而,當前基礎模型(Foundation Models)雖能在模擬環境中產生極為穩健且複雜的運動規劃,但在真實世界中落地的最大挑戰,莫過於「模擬與現實之間的差距(Sim-to-Real Gap)」。
在傳統的實體 AI 系統中,大多採用「分離式架構(Split Architecture)」:
-
AI 推理層:由基於 GPU 的運算模組(如 Edge AI 上位機)負責大腦的視覺辨識與決策推論。
-
動作控制層:由專用的硬體運動控制器、PLC 或專屬機器人控制器負責操作底層馬達。
這兩個獨立元件通常透過標準乙太網路(Ethernet)進行通訊。這種結構性的限制會帶來無法避免的通訊延遲與任務調度延遲,從而在控制迴路(Control Loop)中引入顯著的延時。對雲端 AI 而言,幾毫秒的延遲或許微不足道;但對實體 AI 而言,當機械手臂在抓取動態物體、或自主移動機器人(AMR)在產線快速導航時,時序的不匹配將直接導致機器人軌跡偏移、穩定性下降,甚至造成嚴重的碰撞碰撞或工安意外。
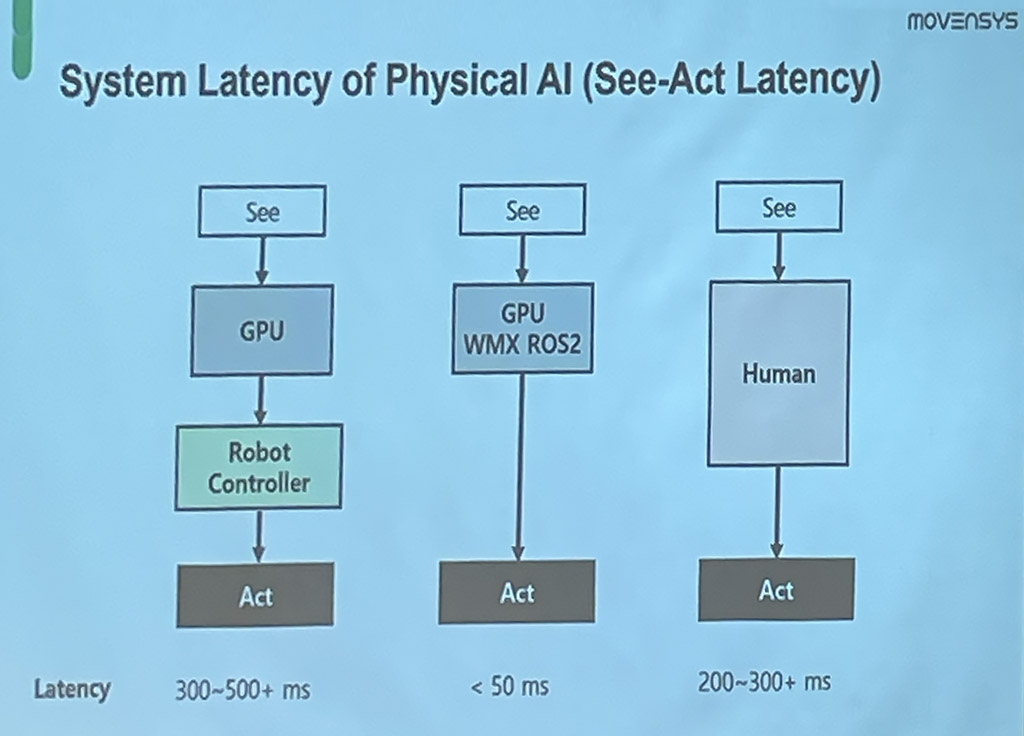
傳統架構在實體AI的「看」到「行動」存在過長的延遲問題,Movensys提出WMX ROS2解決方案(資料來源:Movensys演講)
為了解決這項痛點,Movensys 開發出針對實體 AI 的即時運動控制協定堆疊(Real-time Execution Stack) – WMX ROS2。該堆疊作為即時執行層,透過基於 EtherCAT 的即時通訊和 ROS 2 介面,將 AI 應用層與機器人控制層緊密黏合。這種緊密耦合(Tightly Coupled)的架構,能將 AI 推理與機器人運動控制之間的執行延遲降至最低,實現了「智慧」與「控制」的無縫整合。
在今年的NVIDIA GTC及Computex中,該公司都參與了,也展現了值得關注的技術亮點:
技術亮點一:聯手 NVIDIA 整合 Isaac 平台,追蹤誤差暴減 85%
在 NVIDIA 主辦的全球 AI 盛會 NVIDIA GTC 2026 中,Movensys 的即時執行堆疊研究成果,在競爭極其激烈的遴選中脫穎而出,成功入選海報展示(Poster Presentation)環節。
Movensys 現場展示了如何透過 WMX 軟體運動控制器,將 NVIDIA Isaac 機器人平台(應用層)與底層 EtherCAT 設備進行高效率對接。在基於 NVIDIA Jetson Orin 邊緣運算平台(IPC)的 Isaac 機械手臂對比實驗中,Movensys 的即時控制堆疊展現出驚人的數據突破:
-
追蹤誤差(平均絕對誤差,MAE)大幅降低了約 85%。
這項具體數據有力地證明,不需更改 AI 模型本身,僅透過優化底層的即時執行基礎設施,就能大幅提升機器人在真實環境中的追蹤精度與穩定性。
此外,這套架構更為未來的具身智慧預留了演進通路。展示中概述了「即時自適應微調框架(Real-time Adaptive Fine-tuning Framework)」的未來方向。該框架能即時採集真實世界的感測器遙測數據(例如關節狀態、力回饋等),並直接回饋給機器人基礎模型進行動態調整,讓機器人在操作未知物體或面對多變環境時,具備更強大的自適應能力。
技術亮點二:攜手 Intel 打造單機「觀察-思考-行動」的一體化架構
除了在 NVIDIA 平台的優異表現,Movensys 同樣受到半導體巨頭 Intel 的青睞,受邀在 Intel Edge Solutions Summit 2026(英特爾邊緣解決方案峰會)上展示其確定性即時控制技術。
這項合作展示了如何利用單台 PC 體現實體 AI 的高效境界。Movensys 開發出專為 ROS 2 打造的 WMX Driver for ROS 2,使其運行在搭載 Intel 最新酷睿™ Ultra 系列 3(Core™ Ultra Series 3)處理器的 AI PC 上。該晶片整合了 Arc™ B390 GPU 與高效能 NPU。
核心的技術突破在於雙方軟硬體的深度整合:
-
Intel 技術支援:整合 Intel 的 AI 推理最佳化工具包 OpenVINO™ 與 Intel® TCC(時間協調計算,Time Coordinated Computing) 技術。
-
單機多工(Single-PC Architecture):在 TCC 的保障下,系統具備了「確定性(Deterministic)」的即時回應能力。這使得這台 AI PC 能夠在不需要任何傳統硬體機器人控制器的情況下,於同一個運算核心內,同時運行高負載的 AI 推理與微秒級的即時機器人運動控制。
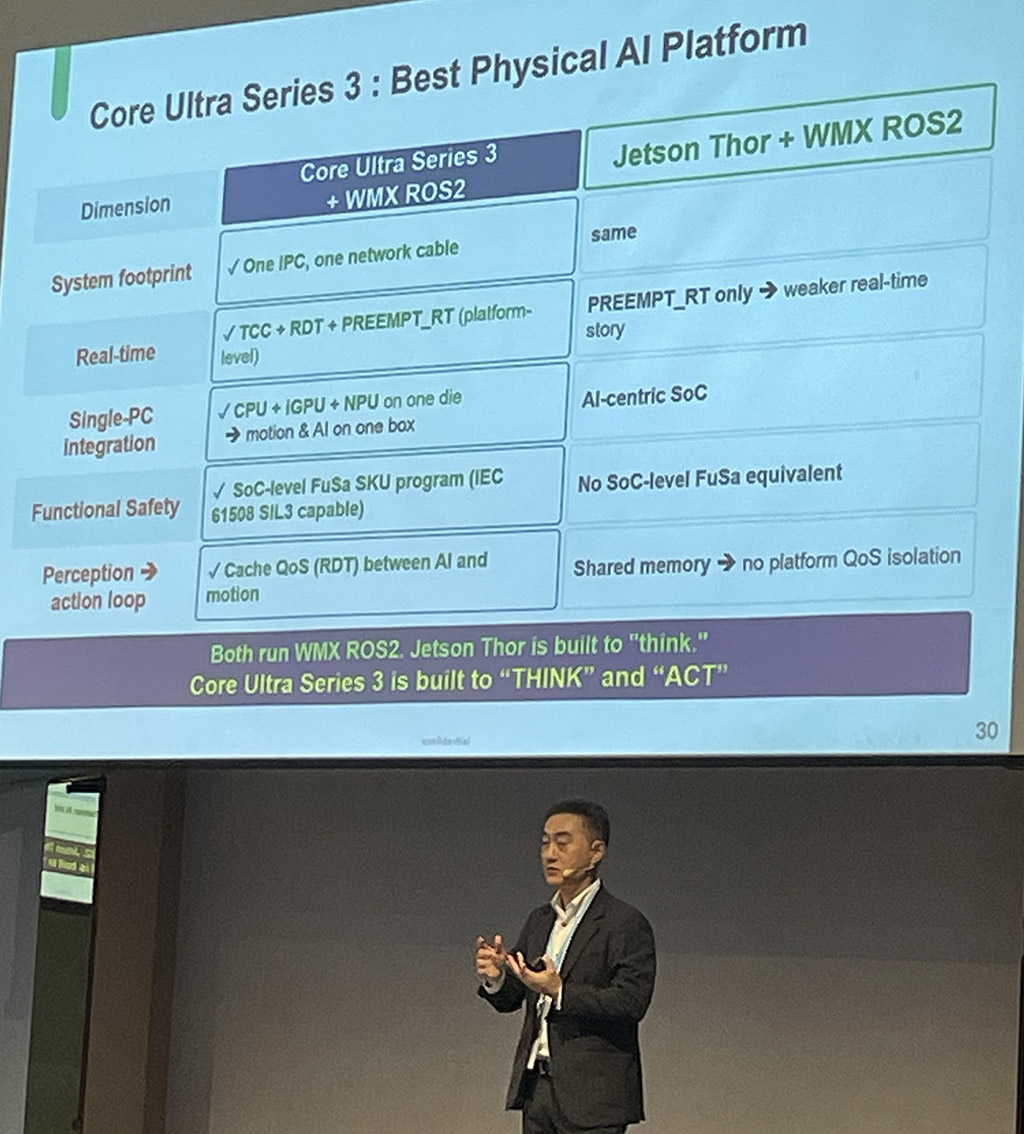
Movensys創辦人楊博士比較Core Ultra Series 2及Jetson Thor結合WMX ROS2的效益(攝影:歐敏銓)
在峰會現場,Movensys 示範了一個極具說服力的協作機器人場景:一台基於 Intel Core Ultra 3 的單一邊緣運算裝置,能夠即時透過視覺辨識並解釋骰子與遊戲棋子的狀態(觀察與思考),接著透過相同的 CPU 運算核心,無延遲地精確驅動機械手臂進行抓取與移動(行動)。這種架構徹底取消了分離式的控制器與獨立電源,精簡了機器人內部的物理空間與硬體成本,同時將穩定性推向全新高度。
技術亮點三:合作研華導入 TSN 網路,智慧工廠的邊緣 AI 實踐
在 COMPUTEX 2026 中,Movensys 則與研華(Advantech)聯手,在研華 InnoTalks 論壇中發表了題為「Integrating TSN for Deterministic Communication at the Control Level」的演說,展示如何將控制層級推向工業物聯網的最前沿。
Movensys 與研華合作的重點,在於將時間敏感網路(TSN, Time-Sensitive Networking)完美整合至其軟體定義控制(Software-defined Control)架構中:
-
純軟體化控制:Movensys 將傳統 PLC 或專用控制卡的功能完全軟體化,直接布署於研華的邊緣運算硬體上,大幅降低了設備廠的硬體依賴與維護代價。
-
微秒級確定性通訊:透過 TSN 網路技術,打破了邊緣運算與動作執行之間的通訊時差。無論是 AMR 在複雜的工廠產線中進行極速避障、路徑動態導航,或是多軸機械手臂在智慧製造產線上的高精度協同作業,TSN 都能確保控制指令在規定的時間內準確送達。
結論
從源自 MIT 實驗室、並已在全球半導體製造設備等尖端工業自動化領域獲得驗證的「Soft Motion」技術出發,Movensys 如今成功將這套工業級即時控制技術,與當前最頂尖的 AI 機器人基礎模型(Foundation Models)軟體堆疊無縫整合。
不論是與 NVIDIA Jetson 平台的結合、在 Intel AI PC 上實現的單機一體化架構,還是與研華硬體及 TSN 網路的垂直整合,都一再表明:Movensys 的軟體執行技術,具備了跨越不同硬體運算環境的「通用基礎設施」特質。
當全球科技產業將目光聚焦於 AI 模型的參數與大腦的智慧時,Movensys 透過其 WMX 軟體控制器,為實體 AI 打造了一套高頻、低延遲、且極具韌性的「神經傳導與骨骼控制系統」。這項突破不僅縮短了數位模擬與物理現實之間的距離,更為下一代自主機器人的大規模商業落地,鋪設了一條切實可行的通途。
(責任編輯:歐敏銓)

- 跨越Sim-to-Real鴻溝:韓國Movensys提出WMX ROS2軟體定義解方 - 2026/06/25
- 東擎科技發表全新工業級強固邊緣AIoT系統平台 - 2026/06/25
- Nordic將AI輔助開發導入整個產品生命週期 - 2026/06/24
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


