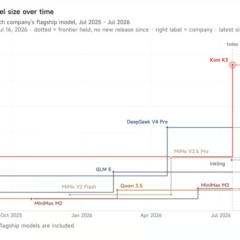
月之暗面Kimi K3模型技術觀察
北京月之暗面(Moonshot AI)在7月份發佈其最新的大語言模型Kimi K3,該模型因為有2800B(或寫2.8T,T為Trillion,台灣稱為2.8兆,大陸稱為2.8萬億)的龐大參數量而受到矚目。
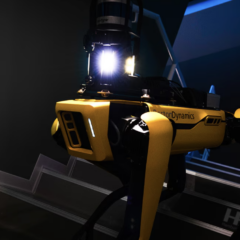
【當Physical AI遇上Agentic AI】下一波AI革命:Embodied Agent!
當Agentic AI遇上Phsical AI,AI技術正從數位世界邁向物理世界,從軟體代理(Software Agent)進化為具備感知、推理與行動能力的 Embodied Agent。
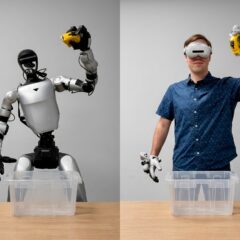
機器人開發環境邁入「標準化、開源化、端對端」新時代
從Isaac Teleop的直覺操控,到LeRobot v0.6.0的資料與API統一,再到GR00T N1.7 的強大具身智慧,最後在DGX Spark上實現快速閉環——這套工作流程成功構建了一座連接虛擬與現實、連接頂尖硬體與開源生態的橋樑。
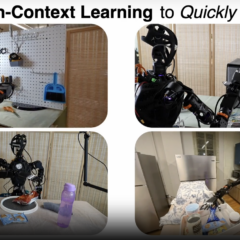
訓練方法大突破:MimicDroid讓人形機器人看影片學習動作!
由UT Austin提出的 MimicDroid,首創了完全不需要機器人遠端操作資料的端對端 ICL 訓練框架,而是直接把「人類日常活動影片(Human Play Videos)」當作唯一的訓練資料源,這技術是如何實現的呢?

微創手術需求升溫 智慧醫療機器人市場加速成長
逐漸成長的市場需求讓手術機器人成為現代手術室中不可或缺的核心平台,日本電子元件大廠村田製作所(Murata)最新發布的應用白皮書對該應用市場現況與關鍵零組件做了詳細的解析。

如何實現長時運作Agentic AI:NVIDIA NemoClaw與Nemotron
2026年,AI 領域迎來了一場根本性的典範轉移(Paradigm Shift)——長時運作(Long-Running)Agentic AI 成為新一代技術的核心主旋律。本文將剖析NVIDIA提出的兩大解方:NemoClaw及Nemotron。