作者:CAVEDU 教育團隊
本文將帶讀者在嵌入式控制板(UP Squared)上面操作 OpenVINO™,搭配 Movidius NCS2 使用 Tensorflow 物件辨識、圖片物件分類技術,並針對台灣路況即時影像(九份老街)進行街景識別。
本文章節
- 安裝 OpenVINO™ 套件包
- 下載/安裝 OpenVINO™
- OpenVINO™ 環境設定
- OpenVINO™ 範例測試
- 圖片物件分類
- 圖片物件識別
- 結合 Movidius NCS2
- 設定 USB 介面
- 道路街景物件辨識
硬體與軟體準備 - UP Squared
本次使用的嵌入式開發版為 UP Squared,使用 Intel 的中央處理器,可支援 Windows/Linux/Android 的作業系統, 具有 USB3.0 跟 40 個 GPIO 可用來做外部的電控,可支援 OpenVINO™ 以及 PCIE 版本的 Intel Movidius VPU 做邊緣運算。
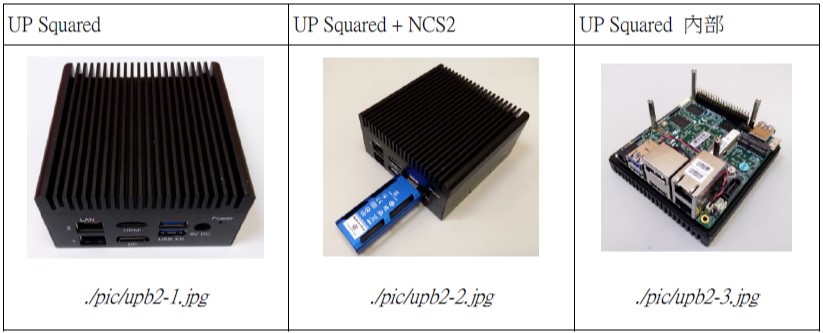
UP Squared圖解(圖片來源:CAVEDU提供)
作業系統
本篇中所用的系統版本為的 Ubuntu 18.04,可從官方的連結下載系統映像檔,系統安裝完畢後,請開機並接上乙太網路,接下來下載套件時會需要能連到外網。
安裝 OpenVINO™ 套件包
下載 OpenVINO™
請到 Intel 官方的網站點選 Register & Download,註冊並下載最新的 OpenVINO™ Toolkit for Linux。

下載完成後,請在 UP Sqaured 上打開終端機(Terminal),並找到下載的壓縮檔, 例如筆者是下載到家目錄下(~),在家目錄下輸入以下的指令的話就可以看到一個 tgz 的壓縮檔。
Ls

接下來我們需要將這個壓縮檔做解壓縮,以下的指令中跑得壓縮檔名稱會根據讀者下載下來的版本有所不同,以本文章為例其壓縮檔名稱為「l_openvino_toolkit_p_2019.1.144.tgz」。
tar xvf l_openvino_toolkit_p_2019.1.144.tgz l_openvino_toolkit_p_2019.1.144/

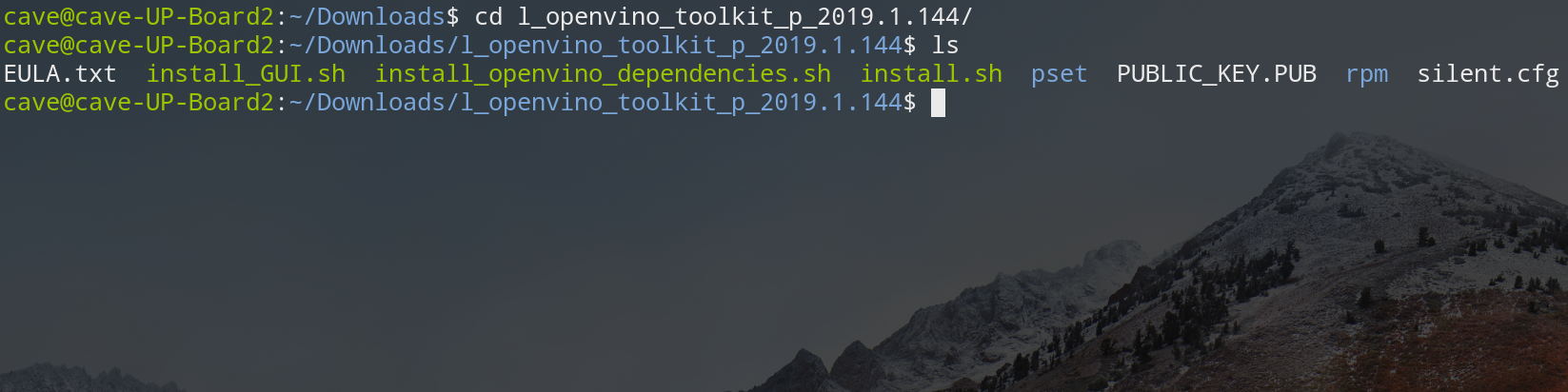
解壓縮完成後,我們切換工作目錄到解壓縮完成後的目錄,準備做下一步的安裝。
cd l_openvino_toolkit_p_2019.1.144
另外輸入ls的話可以查看一下待會用的一些安裝檔,如下圖。
ls
安裝 OpenVINO™
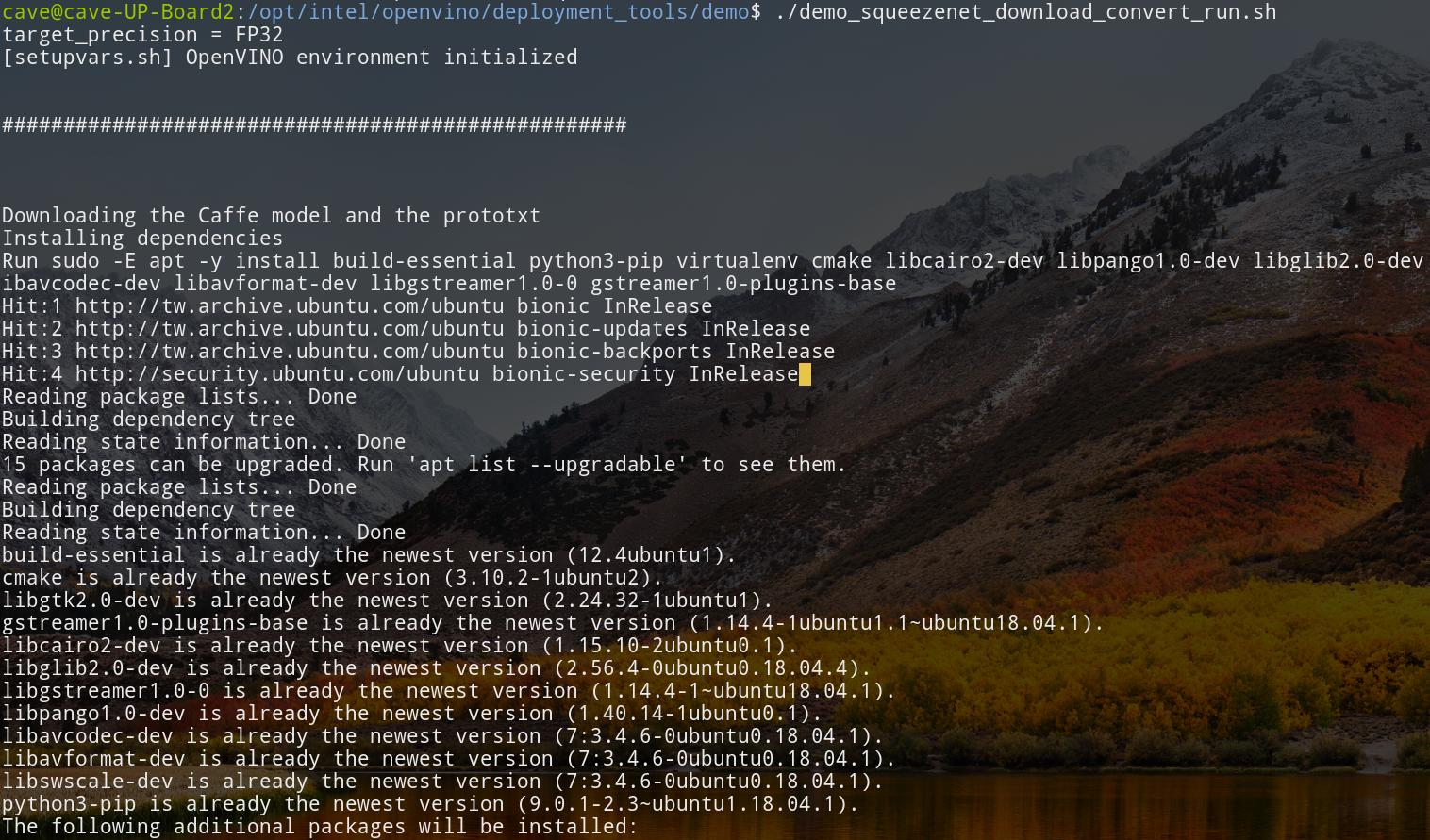
在執行安裝檔之前,我們必須先在系統上安裝必要的編譯套件,首先輸入以下指令來更新及升級系統套件。
sudo apt-get update
sudo apt-get upgrade
接下來安裝必要的編譯套件 CMake。
sudo apt-get install cmake

緊接著我們就可以來進行 OpenVINO™ 的安裝, 輸入以下的指令來執行安裝檔。
sudo ./install.sh
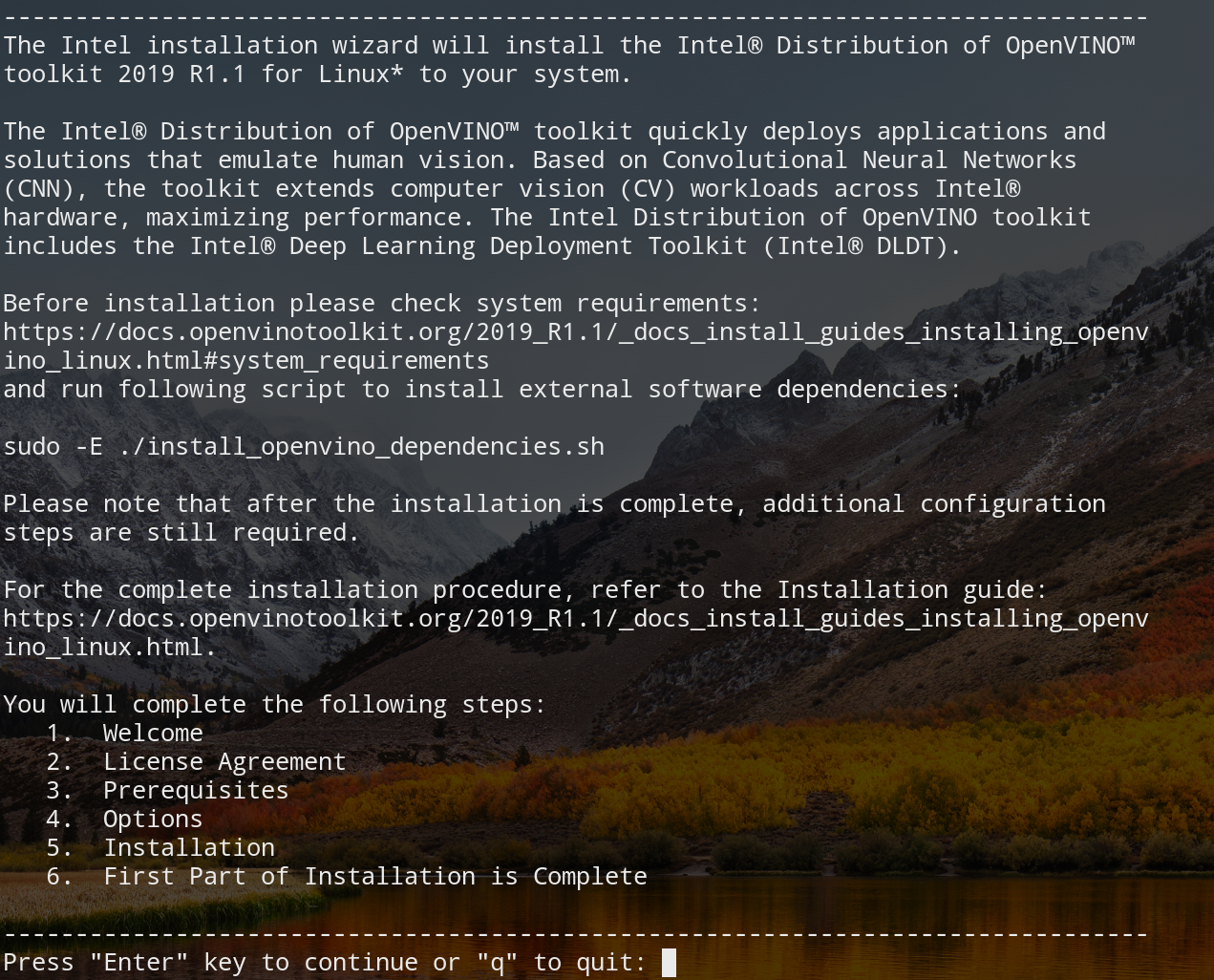
 第一步,請先輸入「Enter」確認開始安裝。
第一步,請先輸入「Enter」確認開始安裝。
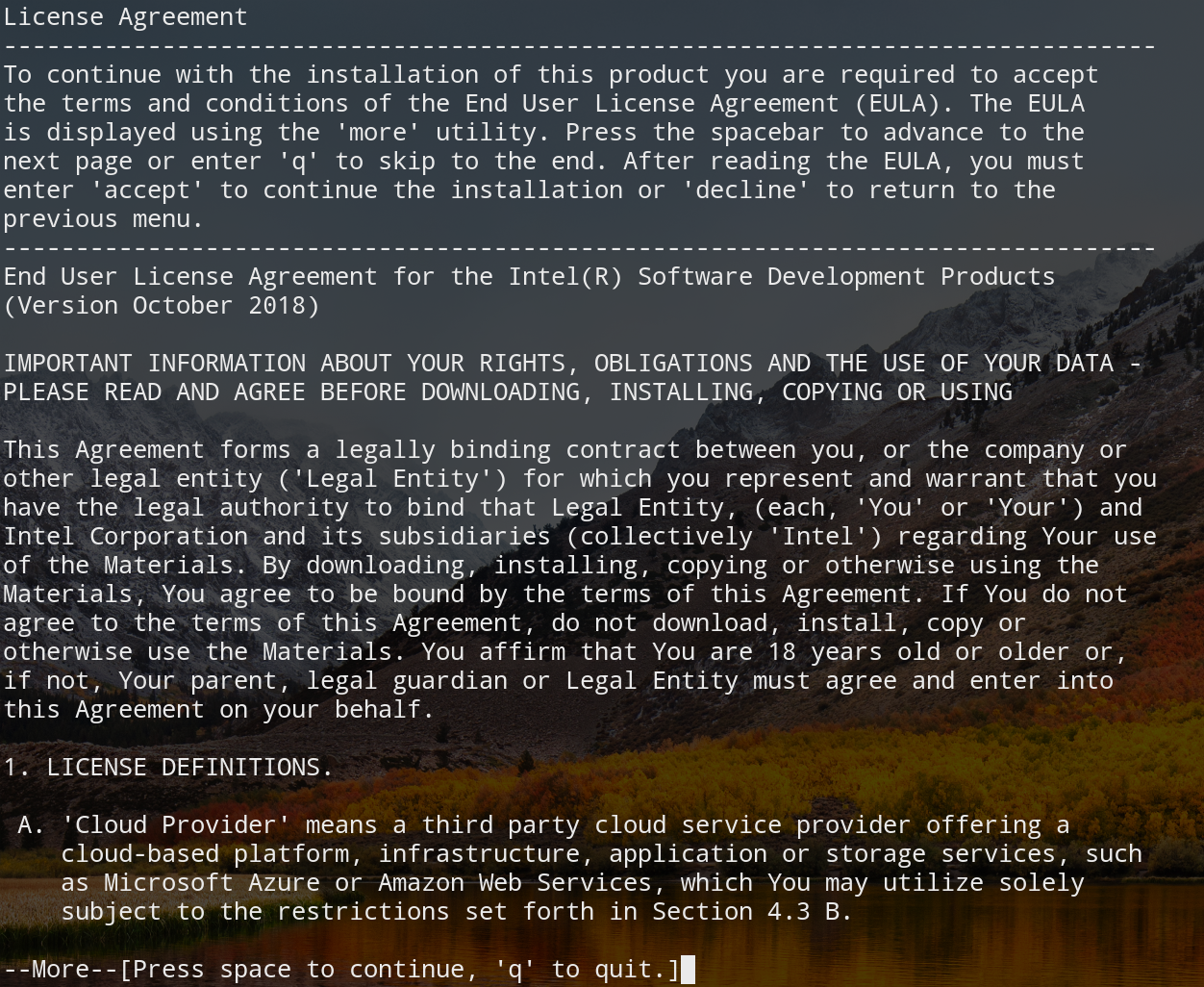
第二步,接下來是一些使用條款,請按下空白鍵進行向下翻閱。
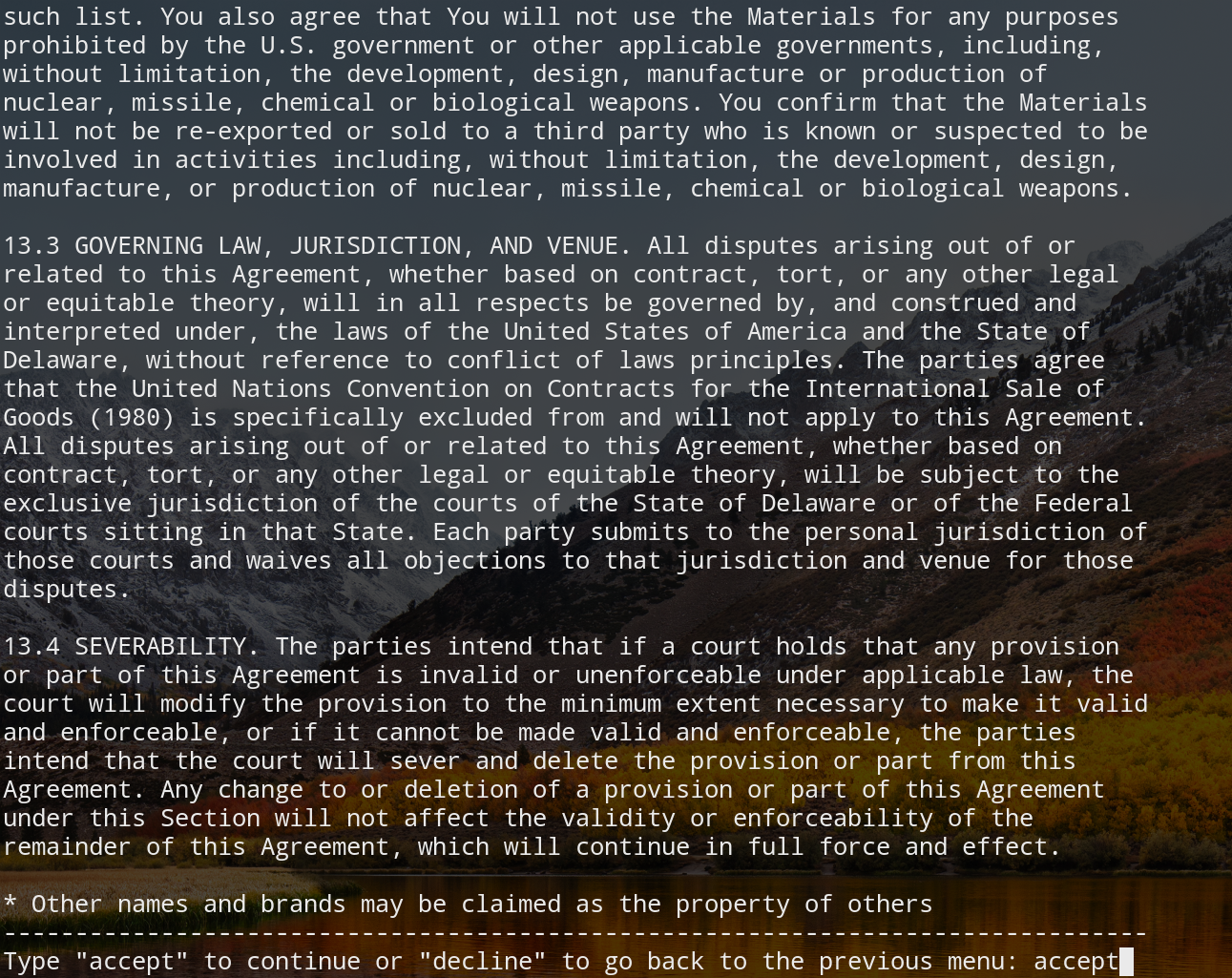
到了最後一段時請輸入「accept」表示已詳細閱讀,並進行後續的安裝。
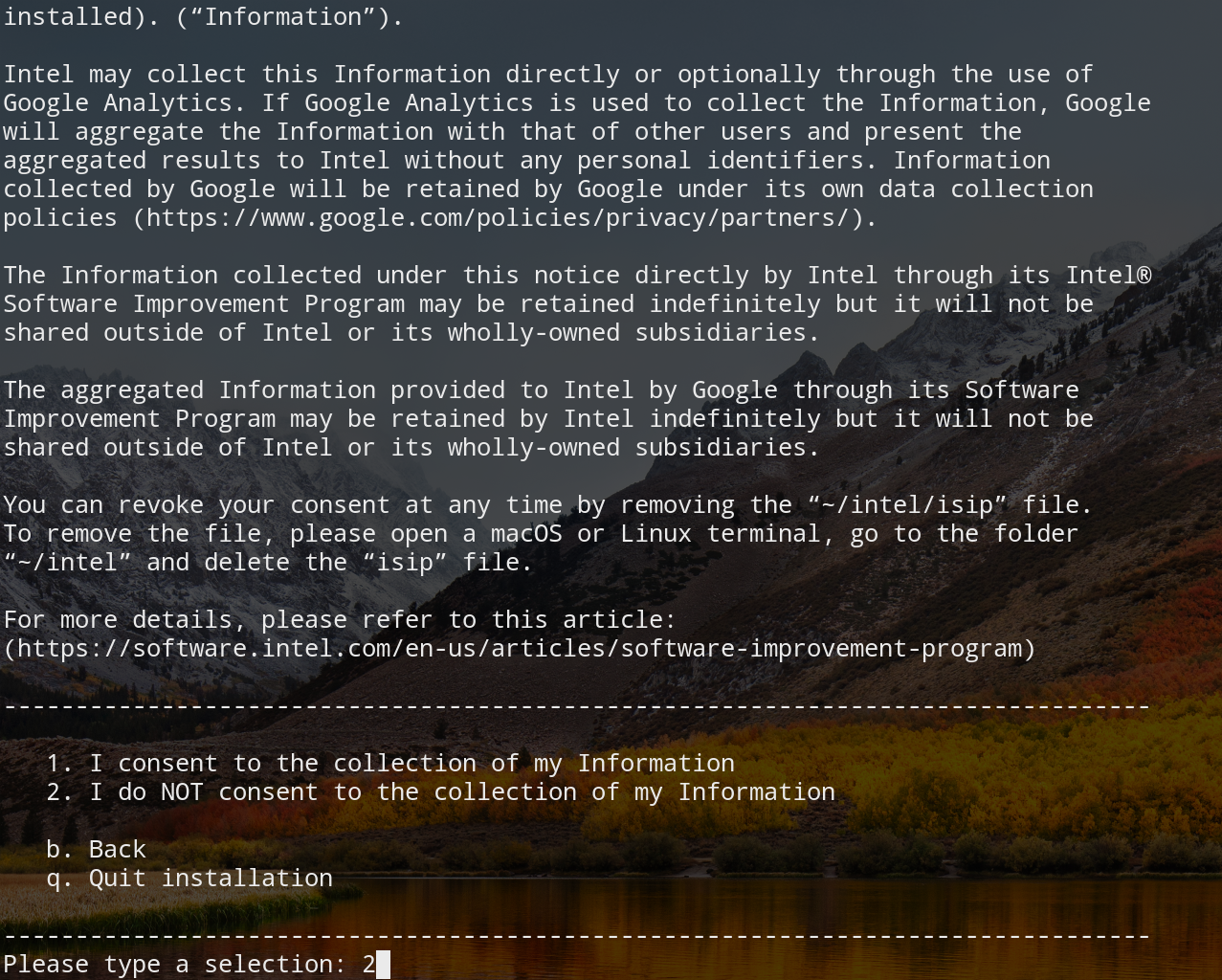
第三步,問使用者是否同意收集使用過程的一些資用,輸入 1 表示同意, 輸入 2 表示不同意。
第四步,程式會檢查是否有缺必要的相依套件,因為之後的安裝會補足缺乏的套件,所以在這一步我們輸入 1 繼續進行下一步。

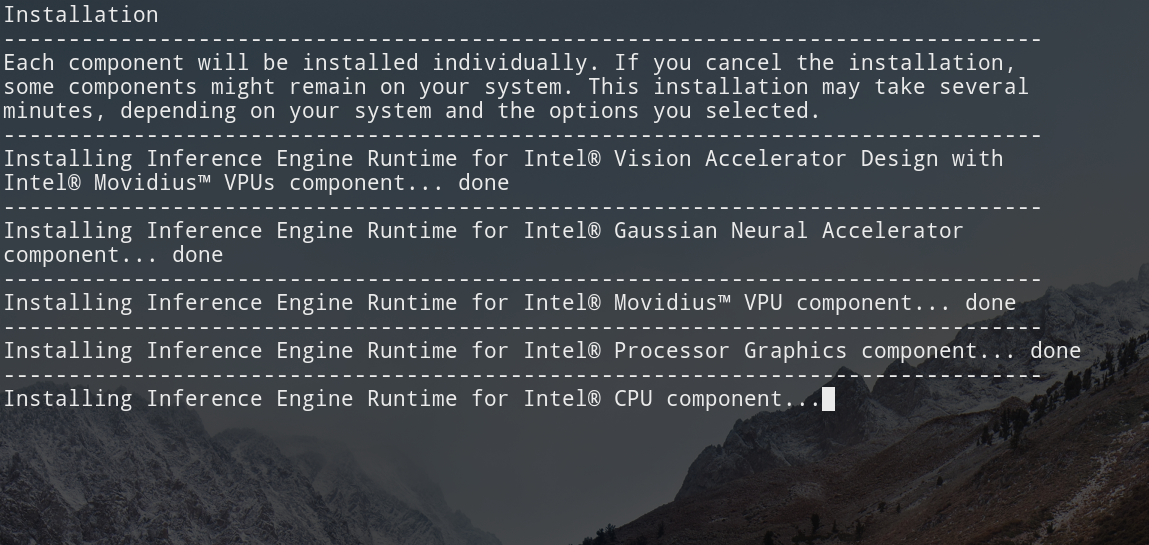
第五步,以下就是接下來會安裝的一些套件及所須佔用的容量大小, 可以看到有 Inference Engine、Model Optimizer、OpenCV 等這些下面應用時會用到的套件都在安裝的列表當中。按下 Enter 鍵就會開始安裝囉!
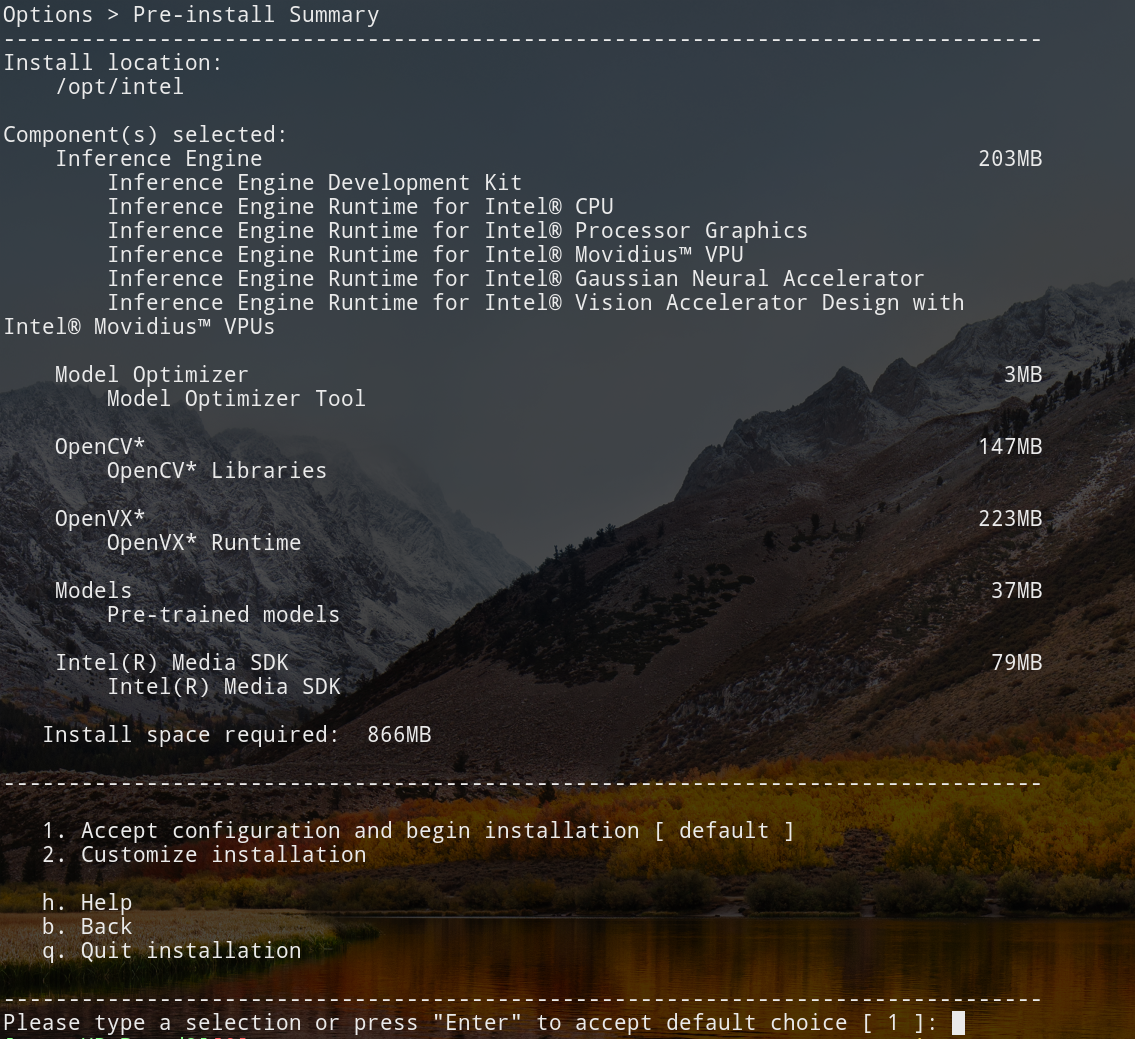
安裝過程會需要一點時間,還請讀者耐心等候。
安裝完成後就會看到以下的提示,按下 Enter 鍵就可以退出安裝程式了。
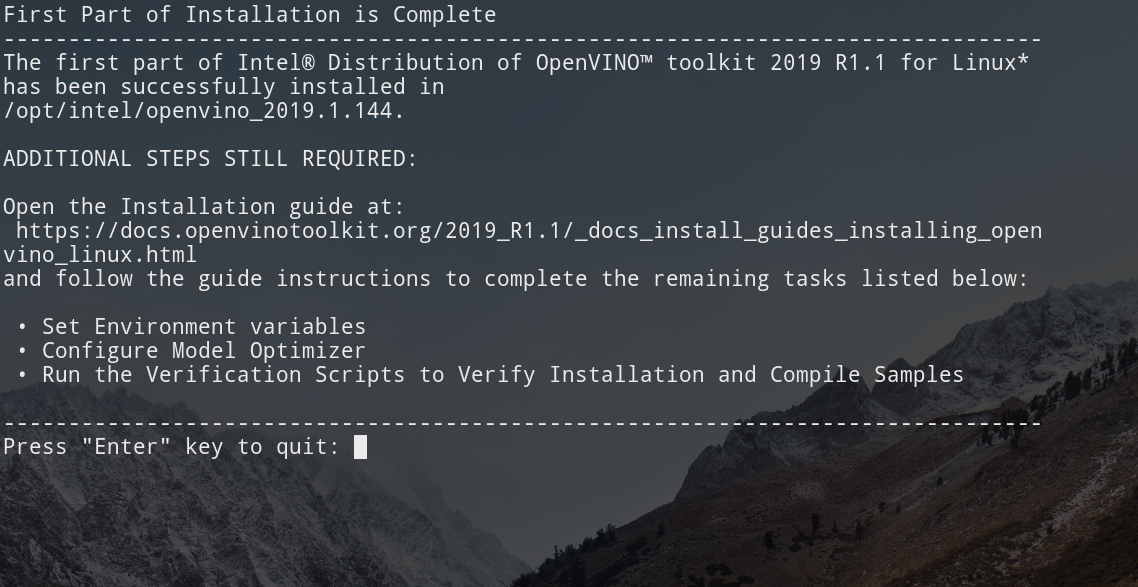
最後一步,除了安裝前面一些主要套件外,還必須安裝一些 OpenVINO™ 的相依套件。

OpenVINO™ 環境設定
為了使系統能夠使用 OpenVINO™ 的函式庫, 我們必須讓使用者操作時的 Bash(系統終端機預設的 Shell)可以讀到 OpenVINO™ 的路徑,為了方便我們將環境設定的程式新增的 Bash 設定檔中, 這樣下次使用者打開 Bash 時就會看到 OpenVINO™ 的環境已經被設定了,如下圖。
echo "source /opt/intel/openvino/bin/setupvars.sh" >> ~/.bashrc

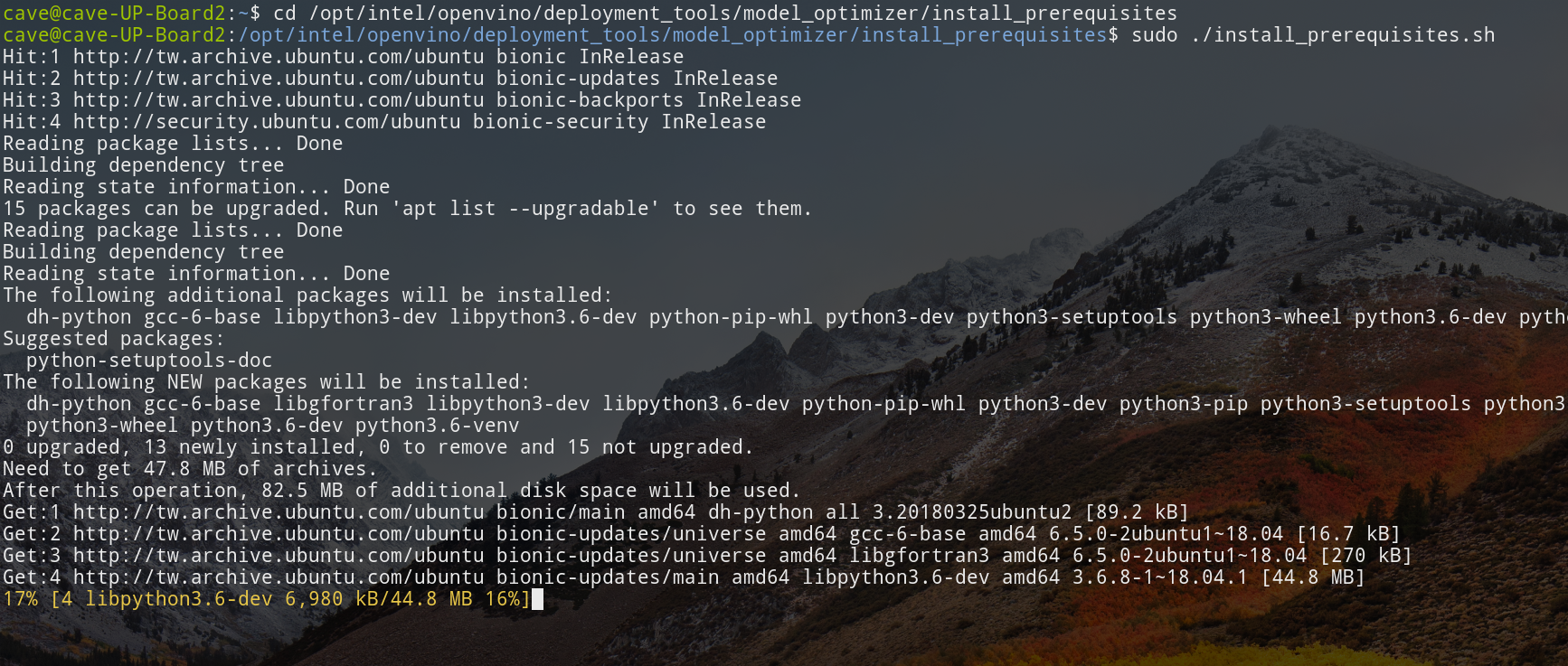
接下來我們切換工作目錄到 Model Optimizer 的位置, 並安裝一些必要的相依套件。
接下來我們來跑兩個 OpenVINO™ 內建的範例, 來測試看看我們安裝的 OpenVINO™ 是否能正常運作。
首先,請輸入以下的指令來切換工作目錄到demo這個資料夾。

範例一:圖片物件分類
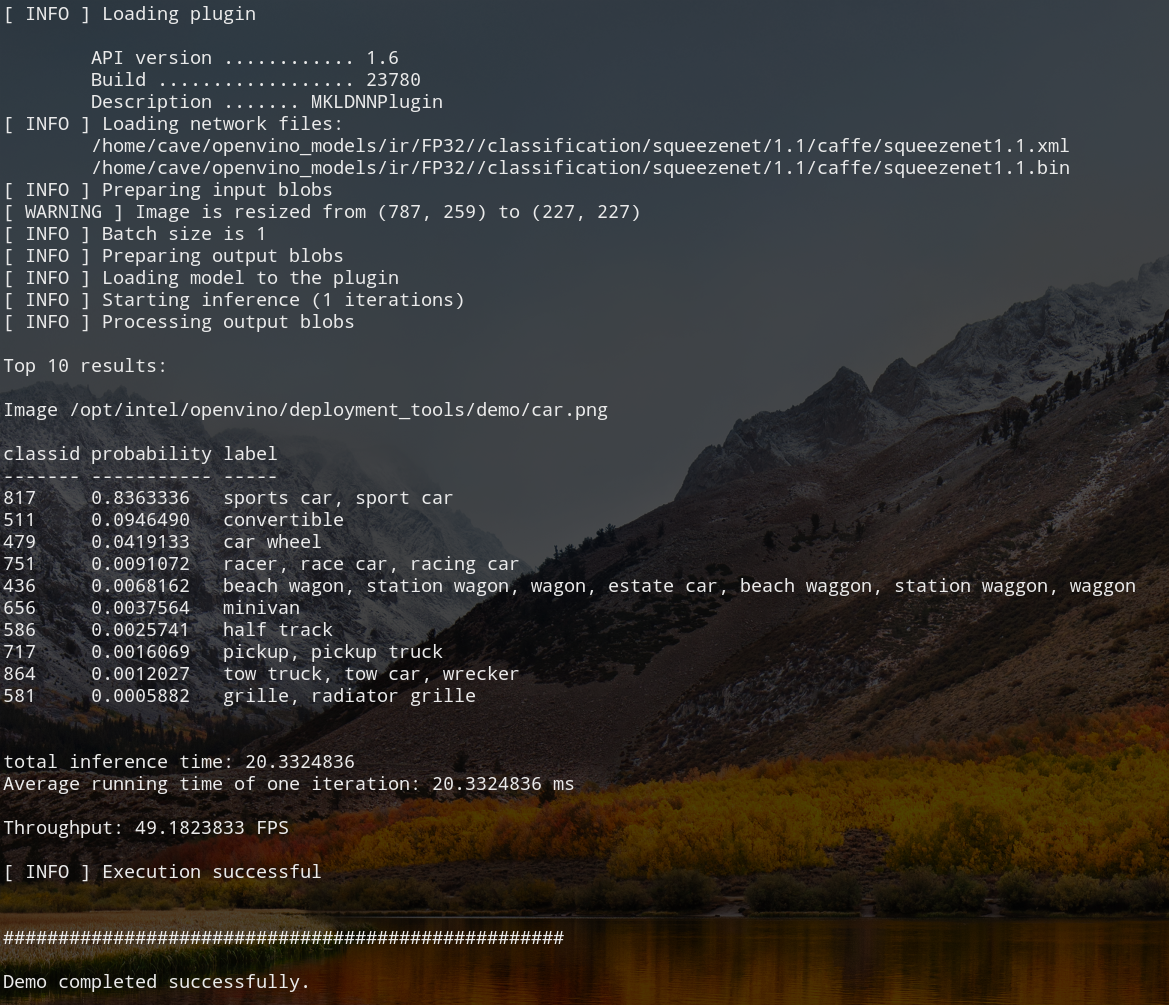
假設我們現在有一張車子的圖片,我們現在想用深度學習的模型(本範例使用的是 SqueezeNet)來辨識圖片中的物件是一台車子。

(圖片來源:CAVEDU提供)
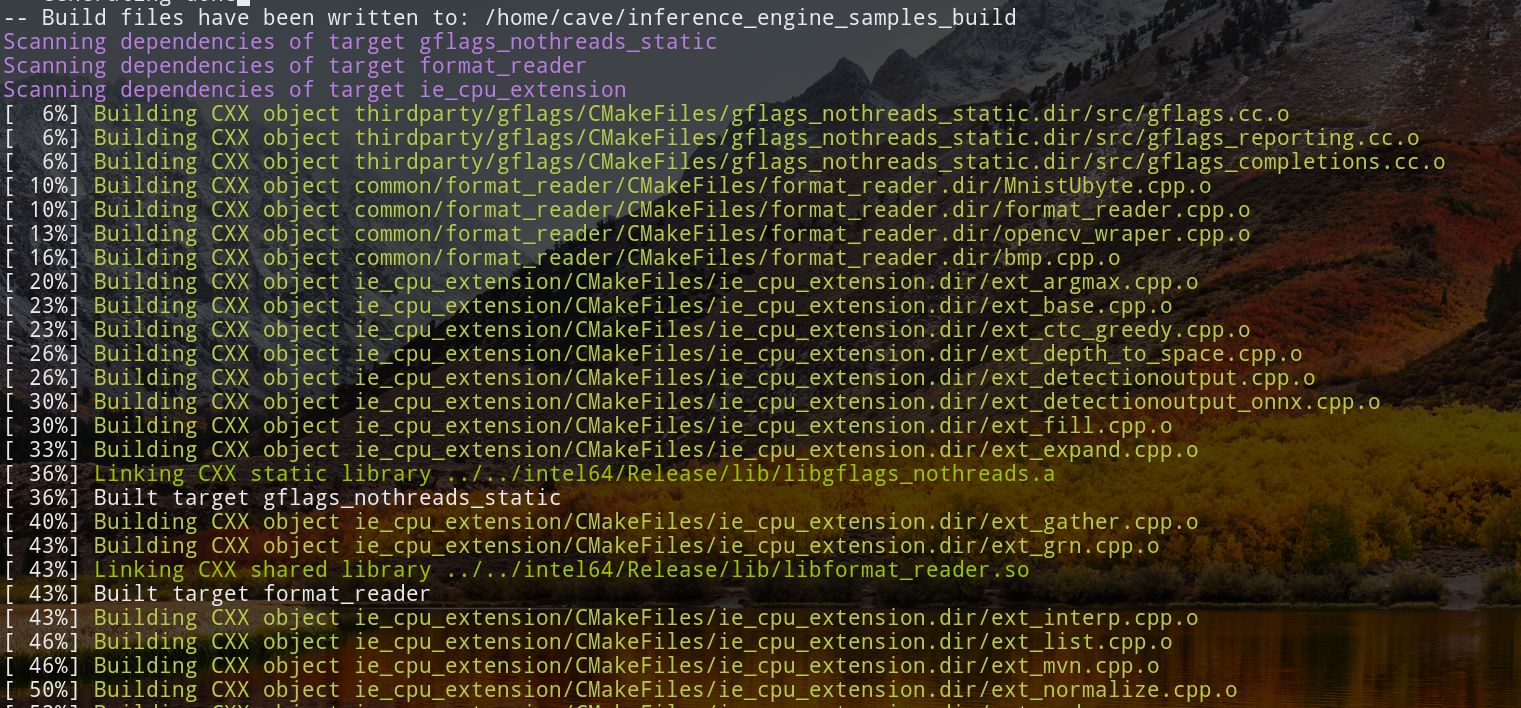
輸入以下指令來下載模型並編譯模型。
編譯模型會需要幾分鐘的時間,請耐心等候。
最後,執行完的結果如下,可以看到它認為最有可能的是跑車(Sport Car),其機率高達 0.836。另一方面,在效能上本範例能作到的表現是將近 50FPS,可說是非常高呢!
範例二:圖片物件識別
第二個範例我們來看一個街景辨識,程式會框出圖片中多個可識別出的物件。 輸入以下的指令來執行範例程式。
./demo_security_barrier_camera.sh

(圖片來源:CAVEDU提供)
結合 Intel Movidius NCS 2
前面的範例使用的計算裝置都是 UP Squared 內建的 Intel CPU, 接下來我們將來探討如何使用 Intel Movidius NCS2(神經運算棒二代), 來達到加速邊緣計算的效果。對 NCS2 有興趣的朋友,筆者在這邊提供購買連結。

(NCS2神經運算棒2代,圖片來源:CAVEDU提供)
設定 Udev Rules
因為 NCS2 使用的 USB 的界面,為了讓 Ubuntu 系統能夠讀取到外接的 NCS2, 需要設定一下系統中的 udev rules。
首先,先將使用者加入一個叫做 users 的群組。

接下來複製 Intel OpenVINO™ 提供的 udev rules 到系統的預設路徑中。

設定完成後,可以手動重新登入 bash、重設 udev。
不過保險一點,筆者建議還是重開機會比較好。
reboot
道路街景物件辨識
安裝 v4l2 相關套件
sudo apt-get install v4l-utils
wget http://launchpadlibrarian.net/409574872/v4l2loopback-utils_0.12.1-1_all.deb \ http://launchpadlibrarian.net/409574871/v4l2loopback-source_0.12.1-1_all.deb \ http://launchpadlibrarian.net/409574869/v4l2loopback-dkms_0.12.1-1_all.deb
sudo dpkg -i v4l2loopback-*

為了讓使用者可以取用 video loopback 裝置,我們必須將目前的使用者加進 video 這個群組中。
sudo usermod -aG video $USER logout groups
加完之後再登出,可以輸入 groups 確認目前這個使用者是否在 video 這個群組中。

最後為了要拿到街景影像串流,我們還必須要安裝 gstreamer 的相關套件。
sudo apt-get install libgstreamer1.0-0 \ gstreamer1.0-plugins-base \ gstreamer1.0-plugins-good \ gstreamer1.0-plugins-bad \ gstreamer1.0-plugins-ugly \ gstreamer1.0-libav \ gstreamer1.0-doc \ gstreamer1.0-tools
接下來下載 openvino-object-detection 這個專案,並進到 openvino-object-detection 這個資料夾中。
git clone https://github.com/YuanYuYuan/openvino-object-detection.git cd openvino-object-detection
然後就可以輸入以下的指令來試跑台灣街頭的影像辨識,預設為九份老街的街景。
make stream_detect
九份老街的街景辨識完成,請參考實例影片:
(責任編輯:楊子嫻)

- 【CAVEDU講堂】micro:bit V2使用TCS34725顏色感測器模組方法 - 2025/06/27
- 【CAVEDU講堂】NVIDIA Jetson AI Lab 大解密!範例與系統需求介紹 - 2024/10/08
- 【CAVEDU講堂】Google DeepMind使用大語言模型LLM提示詞來產生你的機器人操作程式碼 - 2024/07/30
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


