作者:小波
在上一場大家用設計思考點亮提案後,第二場的無人機自造松充電課首先由昌益國際LaBest的負責人 Antony Lien 為大家帶來跨域系統整合設計的建議及分享。
從電影製作看跨系統整合

LaBest 創辦人 Antony Lien 以賽德克巴萊的電影海報開場
Antony以賽德克巴萊的海報開場,提到跨域整合設計的概念不只在產品開發時很重要,更是在電影製作這個大工程中扮演重要的角色,況且電影預算更高、分工更細緻,缺一個細節就無法拍好場景,沒有好的場景就無法構成好電影,因此要成就一部好作品,最初的劇本和分鏡固然重要,有效的溝通和良好合作的團隊更是不可或缺。
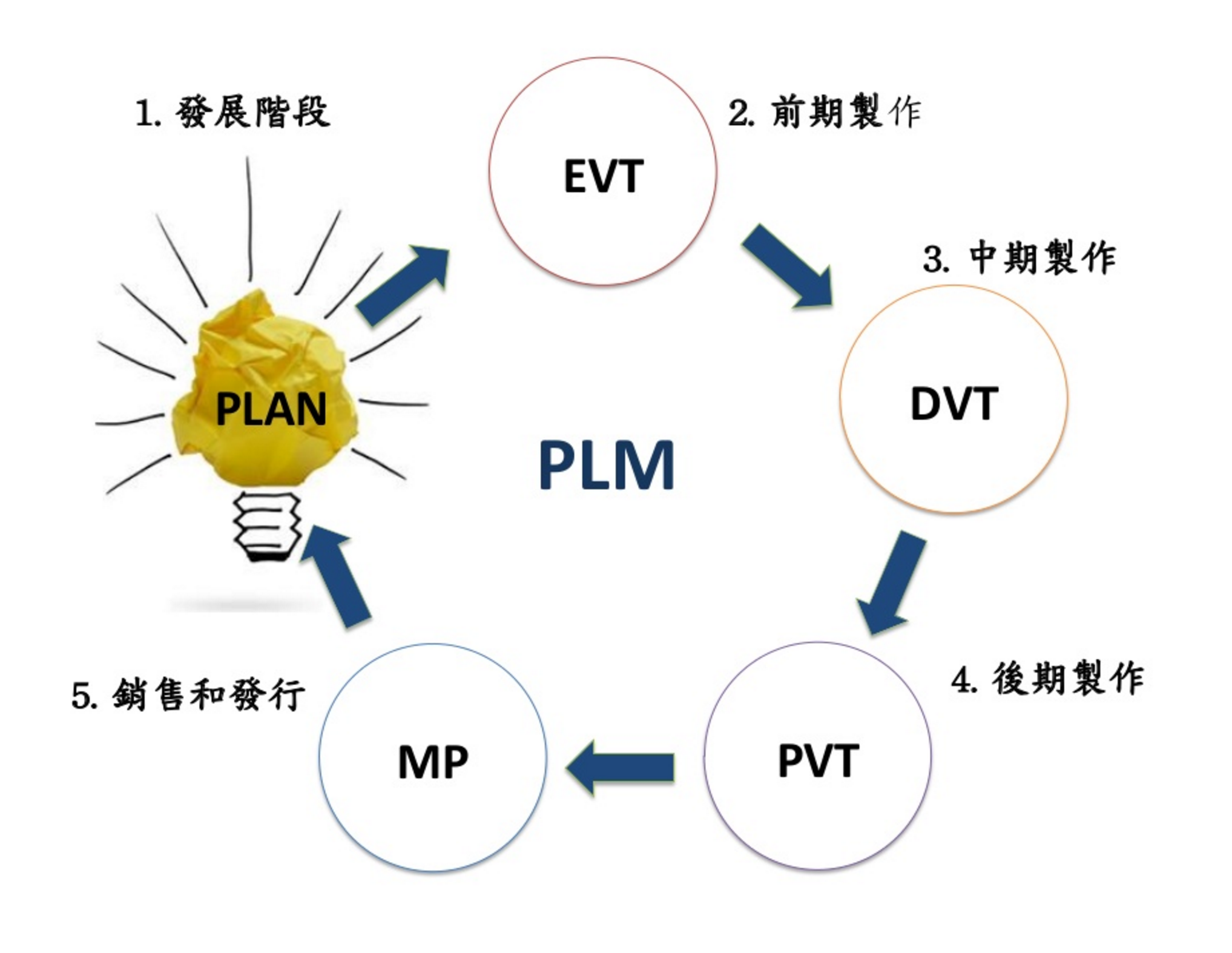
將電影製作對應到產品開發的五階段(圖片來源:LaBest)
關於「電影製作」相對於「產品開發」的過程,Antony提出雷同的五個階段:
1.發展階段
電影製作:撰寫劇本並將之轉換為拍攝的藍圖,要有有情緒內容、故事角色。
產品開發:開始有產品的發想、規劃。
2.前期製作
電影製作:為實際拍攝作準備工作,過程中將會雇用跟聘請演員和工作團隊、挑選拍攝地點,搭建產品。
產品開發:這個階段要做好預算之類的各式評估,並且底定雛形並找其核心團隊,成立公司。
3.中期製作
電影製作:開始拍攝製作電影內容的原始片段,會雇用導演、場記、燈光美術指導等等,並且過程中進行修正,溝通協調是這個階段很重要的。
產品開發:對應到產品開發就是製作prototype,開始完善每個部分的細節,在一定的預算跟時程內,交給各領域的團隊執行。
4.後期製作
電影製作:剪輯影片並剪輯劇中對話、錄製背景音樂和音效、組合場景,此時電影正式完成。
產品開發:產品在這個階段開始生產以及驗證。在產品設計完驗證導入到量產之前,可以測試程式,備料、組裝等等,縮短測試時間流程跟時間成本。
5.銷售和發行
電影製作:針對潛在可能的買主舉行試片,發行商購買電影並且送往電影院或發行成DVD等家庭數位媒體。
產品開發:完成量產發售並找到發行的通路。

Antony說:「one piece怎麼成功的?就是靠團隊。」(圖片來源:LaBest)
最後Antony提到「風險」是跨域整合中絕對要考量的部分,很多人可能覺得產品開發的過程只要按部就班就能很順暢,而其實每個環節都可能會遇到問題,所以需要特別為風險準備時間、人力、物力。
東西剛做好不會動是正常的,但只要程式、系統和模組,事前預備的越充足,將風險因子做越多的預測,就可以讓整個產品開發的過程更加順利。
玩出專業,談無人機的系統開發
Arklab分享創辦人張東琳分享無人機系統開發
「無人機可以有更多應用可能,只要是三度空間其實都可以是無人機的應用場域。」ArkLab多旋翼工坊之負責人張東琳說,不管在地面還是天空,無人機會是智慧化載具的下一塊拼圖,也因為如此,影視轉播、空間資訊、基礎產業、災害應變、保全安防、通訊電信、環境監測、空間資訊等等都是未來無人機的應用層面。
張東琳接著解說:「能夠有這麼多的應用,是因為現在無人機早已跟雲端、物聯網、無人機綁在一起了,那飛行器其實就是扮演了連結的角色」,因為載具就像是中端節點作為平台的執行者,所以即使無人機在民航法底下是仍妾身未明,在全世界都未有母法可管的狀況下,還是漸漸發展出一種管理方法,兩百到五百英呎有個彈性的空間,這將是未來的空中廊道。
在機體的構造設計方面,張東琳建議學員們選用四旋翼,他說:「由於此次Makerthon不限定要載重裝備,可以考慮以輕量化與續航力為主」,即便六旋翼的設計有著容錯機制和更佳平衡的優點,考量到旋體的功耗、滯空時間等等,仍以四旋作為較好的選擇。
而在設計四軸的無人機系統時,有個基本原則:「畫五個圓」,第一個圓是以飛控中心的大圓,加上四個軸上的小圓,這五個圓要在彼此不能打槳的前提下極大化有效升力面積。
張東林也提醒學員:「有人會用3D列印做零件,但我不太建議,因為3D列印有安全疑慮,特別在層跟層之間最脆弱,而翼間速度非常的高,一旦出現裂痕,氣流就會亂,可能造成解體。」

張東琳指出飛行系統架構中的天線對傳輸距離的影響是很大的。
QDB無人機3G服務解決方案
「做機子贏不了別人、做軟體又沒有市場,該如何是好?」、「在IOT這個領域,要怎麼跨到商用型市場?」在下午的課程,資策會工程師陳韋凡分享了這些無人機領域大家常見的疑問。
他提到:「透過GPS 、馬達控制,就可以知道怎麼樣跟物聯網數據整合;通常飛行跟執行的動作是分開的,但是透過平台上下command,就可以同時處理,而QDB為這類需求提供了解決方案。」
陳韋凡接著為夥伴介紹QDB這套由資策會創研所開發的無人機3G服務方案,也願意提供給這梯隊中有需求的團隊來使用。

自造松夥伴積極向陳韋凡工程師提問。
小結
本日課程的最後由張東琳延續早上的的無人機開發主題,帶來操作要領分享,邀請各組的飛行手來測試、講解美國手和日本手的差異、控制器設定等等,在最後也提醒大家在飛航前一定要準備的就是基準點(home),並預設很多fail的狀況,就連低電壓也要做fail-safe,因為安全絕對是功能以外的第一考量。

學員正在練習操控無人機
課程結束後,每一組都如火如荼地展開討論,有人在處理電子圍籬、有人正在組裝無人機、有人預備採買機械手臂的零件、甚至有組別即將開始試飛的,不管如何,從一早看到很多組別已經帶著無人機來到課程就能看出大家的用心和積極,相信經過充實

熱愛音樂、文字、設計,卻也對商業管理、科技新知有著高度興趣,亦樂於討論社會議題;畢業於台大機械系,曾擔任MakerPRO採訪編輯實習生,現在正努力用才華養活自己。
- 集資量產自製樂器,獨立音樂圈的創客新星 - 美秀集團 - 2018/08/30
- 當區塊鏈遇上物聯網,串起未來智慧生活 - 2018/07/16
- 智動創意跨域呈現,中科推出 Pickathon 機器人競賽 - 2018/07/12
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


