在3/19黃仁勳的GTC Keynote中,壓軸登場的「機器人」這個主題,他樂觀指出,人型機器人的市場規模在未來二十年內,有望達到 380 億美元之譜。看好來自工業、製造業和服務的龐大需求,NVIDIA 近期持續發表了一系列機器人基礎模型和模擬框架,以加速開發下一代人型機器人。以下介紹黃仁勳分享中的三個人形機器人亮點關鍵詞:Blue、GR00T N1及Newton。
超Q人形機器人:Blue(小藍)登場
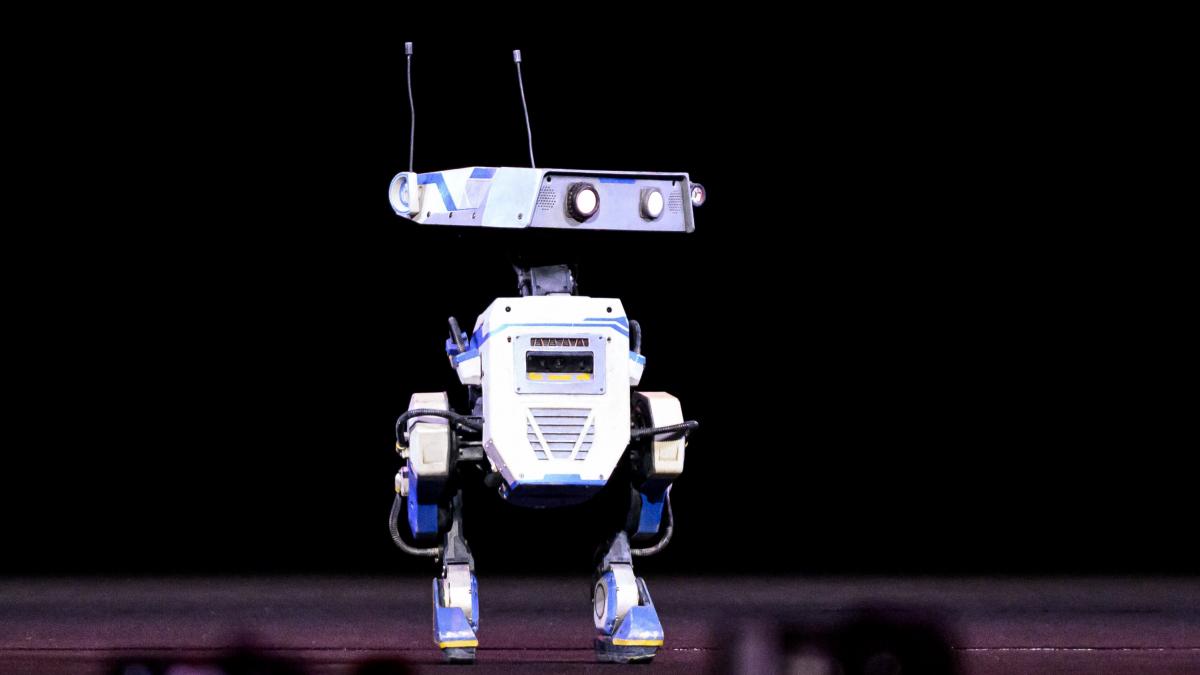
與黃仁勳一同登的這台Q版機器人,正是NVIDIA與迪士尼研究中心(Disney Research)及Google DeepMind合作開發名為「Blue」的小藍機器人,搭配NVIDIA強大的運算力,迪士尼研究部貢獻了在角色設計和動畫方面的經驗,而Google DeepMind 貢獻了在機器學習和人工智慧模型方面的知識。
Blue的設計靈感來自電影《星際大戰》中的BDX機器人,可以用靈活的動作與人互動,非常吸睛。Disney即打算讓Blue走入其全球的主題樂園中和遊客互動,提升遊園的樂趣。除了娛樂之外,富有表現力的機器人技術的進步還為眾多領域打開了大門,從教育到家庭護理,像 Blue 這樣的機器人可以在日常生活中發揮重要作用,幫助完成不同的任務並改善人與機器之間的關係。
人形機器人基礎模型 – Isaac GR00T N1
Blue 的技術核心是尖端硬體與軟體的結合。它由NVIDIA Jetson Nano驅動,這是一個專為人工智慧應用設計的運算平台。得益於此,機器人能夠即時處理數據並以流暢的方式適應其環境。此外,Blue也搭載了NVIDIA最新推出的Isaac GR00T N1,這是全球首款開放且可定制的人形機器人基礎模型,旨在為機器人提供通用的推理和技能。

受人類認知方式的啟發,Isaac GR00T N1 採用了雙系統架構設計:「系統1」負責快速反應,類似於人類的直覺反應;「系統2」則進行深思熟慮的決策,模仿人類的深度思考過程。在視覺語言模型的支援下,系統 2 會對身處的環境和收到的指令進行推理以規劃行動。然後系統 1 會將這些計畫轉換為機器人身上精確連續的動作。
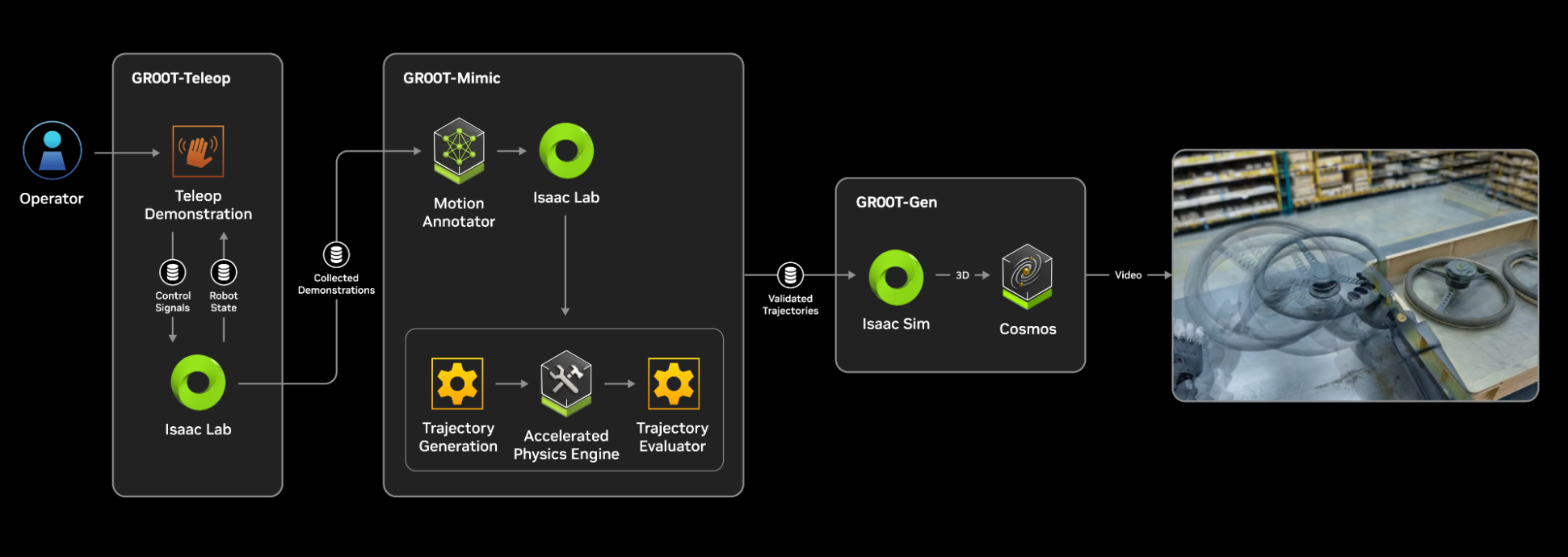
此技術的另一特色是,透過廣泛的訓練數據來進行「模仿學習」。今年初黃仁勳在CES上宣布NVIDIA用於合成運動生成的NVIDIA Isaac GR00T Blueprint,該技術可協助開發者產生大量的合成運動數據,以便透過模仿學習來訓練人形機器人。而GR00T N1即在大量的人形機器人數據集上進行訓練,包括真實捕獲的數據、由NVIDIA Isaac GR00T Blueprint生成的合成數據,以及網路規模的視訊數據等。
所謂模仿學習是機器人學習的一個子集,它能讓人形機器人透過觀察和模仿人類專家的示範來獲得新技能。在真實世界中收集這些廣泛、高品質的資料集既繁瑣又耗時,而且成本往往高得令人卻步。透過用於合成運動生成的Isaac GR00T Blueprint,開發者只需少量人類示範,就能輕鬆產生海量的合成資料集。(參考資料)
目前GR00T N1 可以輕鬆用於處理一般任務,像是用一或兩隻手臂抓取、移動東西,以及將東西從一隻手臂換到另一隻手臂,或是執行需要長上下文與一般技能組合的多步驟任務。這些功能可以用在搬運材料、包裝和檢查等情況。由於NVIDIA已將GR00T N1作為開源模型釋出,開發人員和研究人員可針對特定的人形機器人或任務,使用真實或合成資料對 GR00T N1 進行後期訓練。
開源物理引擎 – Newton

此外,NVIDIA還與Google DeepMind和迪士尼研究中心合作開發了名為Newton的開源物理引擎,該引擎基於NVIDIA Warp框架構建,可以準確模擬現實世界的情況並提高機器人在各種場景中的響應能力,借助該引擎,Blue 能夠以令人驚訝的自然方式行走、停止並適應不同的地形。NVIDIA Warp框架是一個CUDA-X加速庫,讓開發者能夠輕鬆編寫GPU加速的核心程序,用於模擬人工智慧、機器人和機器學習等領域。
Newton也與MuJoCo(Multi-Joint dynamics with Contact)相容,這是一個廣泛應用於機器人研發的開源物理引擎,特別適用於處理複雜的動力學和接觸豐富的環境。Google DeepMind開發的MuJoCo-Warp,利用NVIDIA Warp進行加速,實現了人形機器人模擬速度提升超過70倍,手部操作任務速度提升達100倍。
Newton同時支持豐富的多物理場模擬,允許機器人透過自訂求解器、積分器和數值方法與食物、布料等可變形物體進行交互,滿足現代機器人技術不斷擴大的應用需求。
小結
你相信「通用機器人時代已經到了」?若說人形機機器人很快將與我們共同生活或工作,恐怕還言之過早,但運用各類型機器人來替代短缺的人力,卻是大勢所趨,而開源且強大的開發工具與社群,正加速這個趨勢的發展。
》延伸閱讀:
NVIDIA 宣布推出 Isaac GR00T 藍圖以加速開發人型機器人
NVIDIA宣布推出Newton,一款用於機器人模擬的開源實體引擎
用於機器人學習的開源統一框架 – NVIDIA Isaac Lab
利用世界基礎模型加速實體人工智慧開發 – NVIDIA Cosmos

- 【產業剖析】人形機器人火熱背後的現實難題 - 2026/06/15
- 【COMPUTEX 2026】以「具身智慧界Android」為定位的韓國Circulus - 2026/06/05
- 演算法戰爭:AI自主武器的「去人性化」危機! - 2026/06/02
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!