人類五感中,嗅覺難以被機器模擬。與視覺或聽覺不同,氣味並非像光波或聲波,是「單一的波」,它是由複雜化學分子組成、隨空氣擴散而呈現不規則分布的訊號。同時氣味會受到環境風向、濃度擴散等因素影響。因此,將嗅覺「數位化」並轉譯成機器可以理解的語言,被視為技術上的一大挑戰。而隨著感測器技術、人工智慧(AI)與機器人整合能力大幅提升,機器逐漸開始具備類似動物的嗅覺,不只能「聞到味道」,也能如狗一般判斷味道濃度、辨識氣味,甚至追溯氣味的源頭。
AI與電子鼻
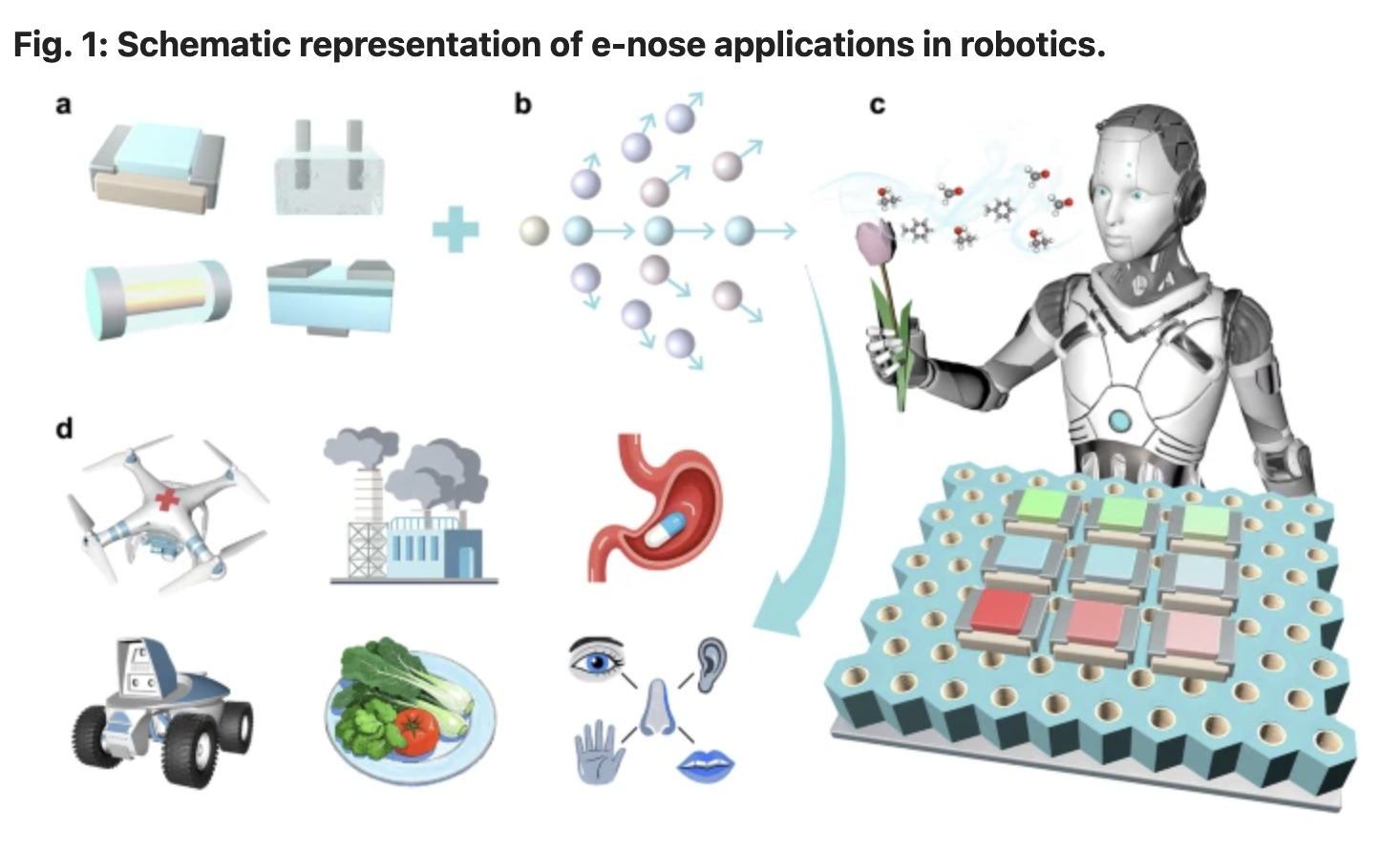
要讓機器具備嗅覺,最基本的裝備是電子鼻(electronic nose):一種由多個氣體感測器組成的氣味偵測裝置,能感知空氣中的揮發性有機化合物(VOCs)並轉成可供分析的數據。透過機器學習或 AI模型分析這些訊號,就能辨識不同氣味或化學物質。
其感測器可分為四類:
- 金屬氧化物感測器:使用微小加熱板檢測氣體
- 電化學感測器:依靠化學反應檢測特定分子
- 光學感測器:利用光檢測氣體
- 場效應電晶體(FET):基於晶片製作,當不同氣體分子附著時會改變電導率。
(圖片來源)
這些感測器能對不同氣體產生不同反應,類似人類嗅覺受器的運作方式。隨著奈米材料與微機電系統(MEMS)技術的進步,氣體感測器的靈敏度與反應速度大幅提升,使機器人能更準確地辨識氣味種類與濃度變化。
嗅覺導航與應用落地
傳統的機器人導航多依賴視覺系統(如攝影機)或定位技術(如GPS),然而這些方法在煙霧瀰漫、光線不足或無衛星訊號的環境中往往難有建樹,而嗅覺導航則提供了一種不同的解決方案。
誠然,嗅覺系統賦予機器人「感知氣味」的能力,然而單靠這一能力仍不足以完成導航任務。其核心挑戰在於,如何從瞬息萬變、分布不穩定的氣味訊號中準確推斷氣味的源頭。因為氣味並非均勻擴散在空氣中,受到風向、溫度與環境障礙物影響,形成高度不規則的「氣味羽流」(odor plume),嗅覺導航機器人可結合AI演算法來分析這些複雜訊號。
早期方法多採用濃度梯度追蹤,即朝氣味濃度增加的方向前進,但這種方法在氣流不穩時容易失效。近年研究者開始借鑑昆蟲行為,例如飛蛾在失去氣味訊號時會採取Z字形搜尋路徑,或螞蟻利用隨機探索與回饋機制尋找食物來源。這些仿生策略被轉化為演算法,使機器人能在訊號中斷時仍持續搜尋目標。

(圖片來源)
目前,嗅覺導航機器人已開始出現實際應用的雛形。Ainos所開發的AI Nose技術,已與ugo Inc.的服務型機器人結合,用於工業場域中的氣味監測與安全檢測。AI Nose整合了高精度氣體感測器陣列、即時訊號處理與先進 AI 演算法,可將各類揮發性有機化合物(VOCs)或氣味數位化並轉換為「氣味識別碼(Smell ID)」。其能辨識特定氣體並發出警示,可應用於化工廠、能源設施及醫療環境等場域。
結語
機器人擁有嗅覺,代表了技術正從從「視覺主導」轉向「多感官融合」。當機器人補足視覺與聽覺的缺陷,能夠像生物一樣利用嗅覺理解環境,其應用範圍將不再受限於可見世界,而能深入更複雜、更危險的場域,有望在救災、環保、醫療與工業安全等領域發揮關鍵作用。
延伸閱讀
A smelly snapshot of the current state of electronic noses for robots
Robotic odor source localization via adaptive bio-inspired navigation using fuzzy inference methods
Olfaction and Hearing Based Mobile Robot Navigation for Odor/Sound Source Search

- 送餐也將無人化:AI配送從洛杉磯到澳洲黃金海岸 - 2026/07/31
- 提升購屋效率與體驗 日本房仲業導入「AI+真人」新模式 - 2026/07/24
- AI仿生機器人將重新定義人與機器的關係? - 2026/07/15
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


