

【CAVEDU講堂】ROS for Windows 安裝流程
ROS機器人作業系統終於完整支援Windows作業系統了,網路上有很多安裝教學,今天我們也來跟著做一次。操作過程參考了 ROS 官網與 Microsoft Gituhub。

【CAVEDU講堂】Micro:bit的雲端IoT應用 — Gravity IoT Starter Kit for micro:bit
本篇文章示範 Micro:bit 的雲端 IoT 應用,實際應用 DFRobot 的防水型溫度感測器 KIT0021,從註冊、編輯程式、燒寫程式、模組連接至實際功能測試,講解如何上傳溫度資料到雲端。

【CAVEDU講堂】NVIDIA Jetson Nano 實際使用:從入手到安裝系統、開機與遠端連線
本篇文章開箱 NVIDIA Jetson Nano,一步步帶您安裝作業系統、開機、Wi-Fi 連線、SSH 遠端連線,實際測試。
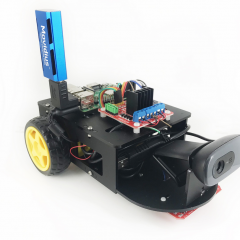
【CAVEDU講堂】使用Intel NCS 2及OpenVINO在樹莓派上跑自駕車
本篇文章分享CAVEDU 團隊使用樹莓派結合第二代的 NCS 實作自駕車, 並搭配Intel的AI加速工具OpenVINO 來實現。
【CAVEDU講堂】在 Windows 上安裝 TensorFlow 的環境
本篇文章分享神經網路運算的相關實作、介紹其分類,並以Anaconda 環境實作 Tensorflow 在 Windows 系統的安裝教學。

【CAVEDU講堂】樹莓派遠端監控 3D 列印工作的利器 — OctoPi
OctoPi 是 OctoPrint 針對 3D 印表機的樹莓派軟體所發佈,可以透過它遠端傳輸檔案、監看印表機的列印狀況,直接控制 3D 列印。
如何客製化企業 RAG 知識庫?— 從資料庫到知識整合的實戰技術
