在數位世界中,大型語言模型的訓練可以依賴龐大的網際網路資料,但在實體世界,訓練一個具備「手眼協調」或「平衡感」的機器人卻面臨極大挑戰。
在現實中進行機器人訓練,不僅面臨硬體損耗、成本高昂的問題,更受限於「物理時間」的一比一流逝。為了克服這些難題,NVIDIA 構建了一套完整的模擬生態系,讓機器人在虛擬世界中以「數位孿生」的形式,在數小時內經歷現實世界數年的磨練。
這場技術革命的核心,在於如何縮短虛擬與現實之間的差距(The Simulation-to-Real Gap;Sim-2-Real Gap)。透過 NVIDIA Isaac 平台的技術支柱,開發者正利用 Real2Sim 獲取真值,並透過 Sim2Real 實現穩定部署,從而形成一個資料驅動的開發閉迴路。本文將詳盡剖析這套流程的技術底層與整合邏輯。
如何縮小Simulation-to-Real Gap是機器人開發的一大挑戰(source)
NVIDIA 的解決方案:從 Omniverse 到 Isaac Lab
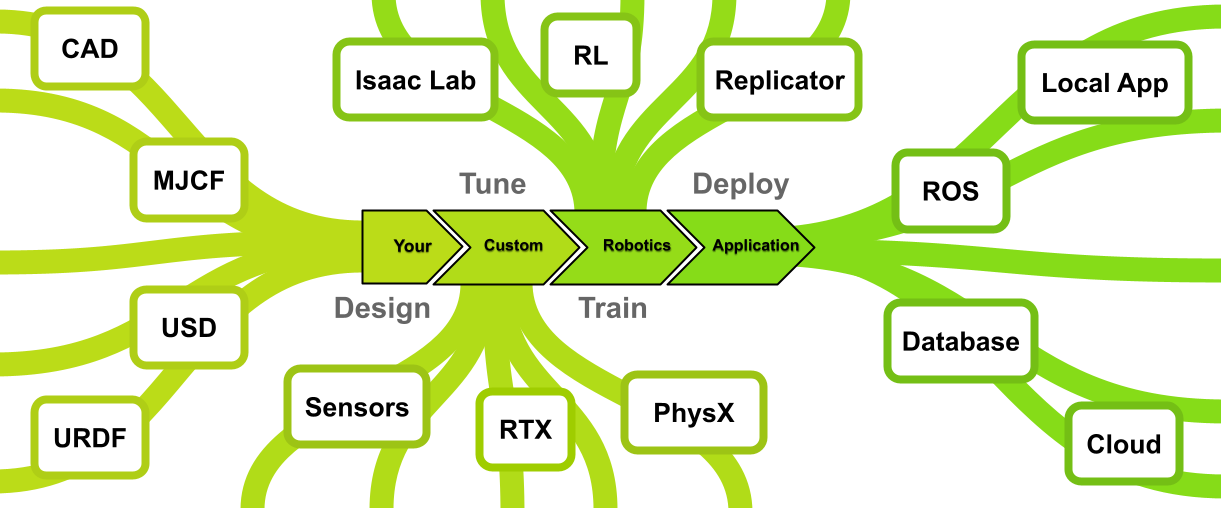
NVIDIA 的方案並非單一軟體,而是一套基於 GPU 運算與通用場景描述(OpenUSD)的層次化架構。這套架構確保了從光學模擬到動力學計算的高度一致性。
1. NVIDIA Omniverse:工業級的數位孿生底層
一切始於 Omniverse。這是一個基於 OpenUSD 的協作平台,專為構建大型工業數位孿生而生。它提供了核心的 RTX 渲染技術與 PhysX 實體引擎。與傳統遊戲引擎不同,Omniverse 追求的是「物理精確」,它能精確模擬材料的應力、光線的物理折射以及流體的動力學表現,為機器人提供一個完全符合物理定律的虛擬環境。

2. NVIDIA Isaac Sim:機器人的感知與交互實驗室
Isaac Sim 建構在 Omniverse 之上,是專門針對機器人生命週期設計的應用。其核心價值在於「合成資料生成」(SDG)與感測器模擬。開發者可以利用 Isaac Sim 模擬 LiDAR、深度相機等感測器,並透過 Replicator 功能自動生成帶有語義標註的影像資料。這意味著,機器人可以在虛擬場景中自動學習辨識物體,無需人工手動標記數以萬計的現實照片。
Isaac Sim系統架構(source)
3. NVIDIA Isaac Lab:強化學習的極速訓練場
Isaac Lab 是目前人形與四足機器人開發的核心訓練環境。它實現了端對端的「全 GPU 加速」。在傳統流程中,實體運算在 CPU 進行,AI 模型在 GPU 進行,資料傳輸會造成巨大延遲。Isaac Lab 將兩者全部封裝在 GPU 內,讓開發者能同時開啟數千個環境。在這樣的架構下,機器人可以在極短時間內學會極其複雜的跳躍與攀爬動作。
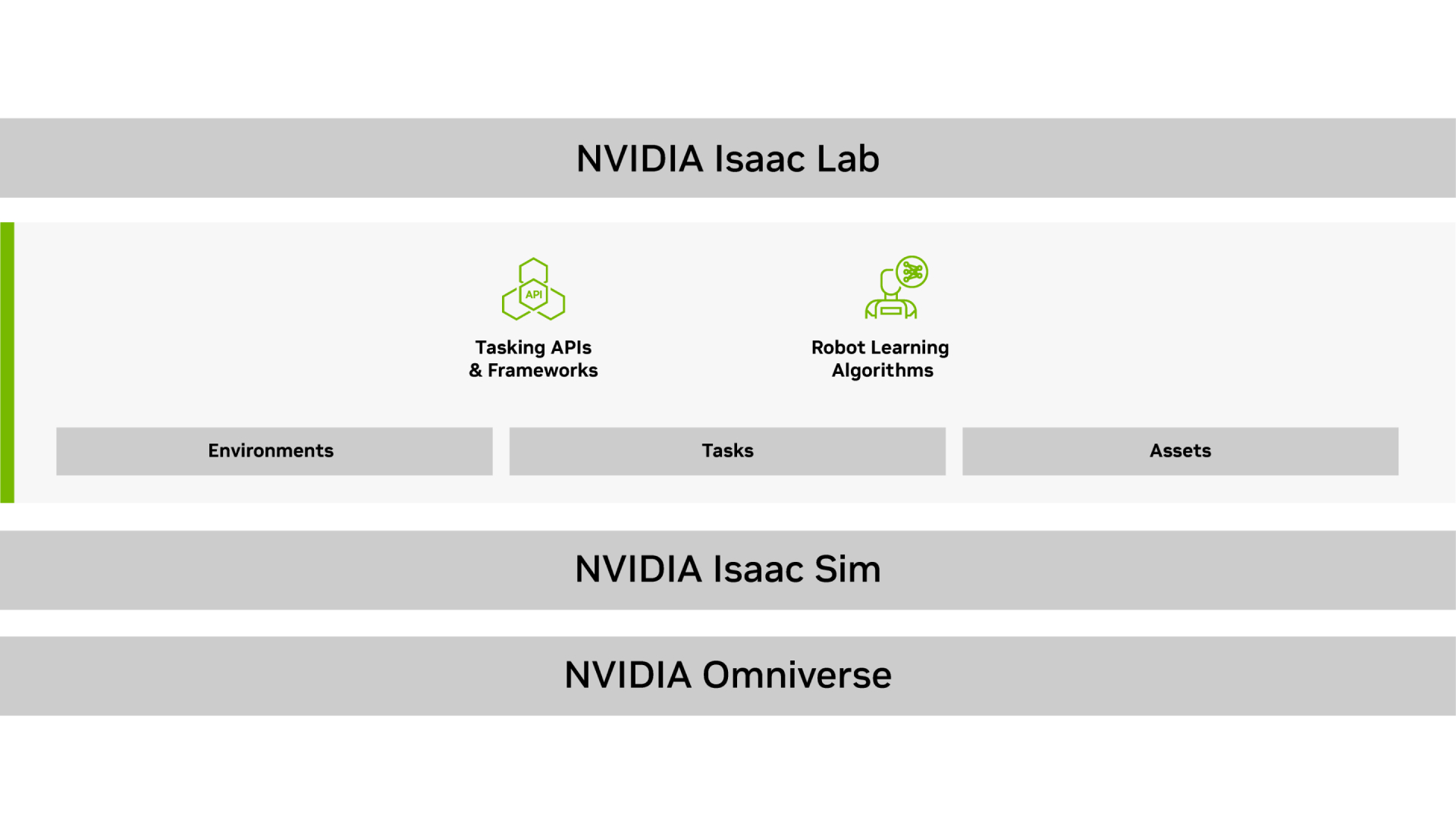
Omniverse、 Isaac Sim和Isaac Lab的架構層次關係圖(source)
Real2Sim 與 Sim2Real 的技術整合流程
模擬技術的成功不僅取決於虛擬環境的強大,更取決於它如何與現實世界進行「資料對齊」。以下是兩種核心整合路徑:
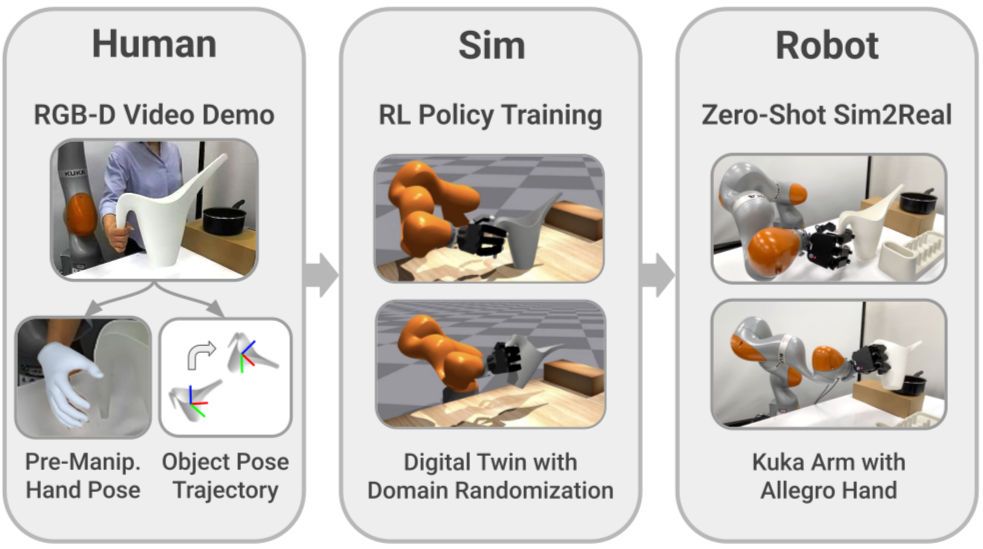
1. Real2Sim:將現實精確對齊至虛擬(以 LeRobot 為例)
Real2Sim 的目標是解決「模型失真」問題。以 Hugging Face 的 LeRobot 專案為例,該專案專注於模仿學習(Imitation Learning)。開發者首先透過實體裝置採集人類操作機器人的軌跡數據。隨後,這套數據被輸入到 Isaac Sim。
開發者會透過調整模擬環境中的物理參數(如馬達扭矩曲線、環境摩擦係數 μ),直到虛擬機器人在相同指令下的運動表現與現實資料一致。這種「逆向參數辨識」確保了模擬環境不再只是看起來像,而是動起來也像。
》延伸閱讀:平民化的AI機器人開源平台:LeRobot是什麼?
2. Sim2Real:將虛擬智慧部署至現實(以 Boston Dynamics 為例)
Sim2Real 的挑戰在於「環境穩定性」(Environmental Robustness)。Boston Dynamics 等頂尖團隊在 Isaac Lab 訓練時,會使用「領域隨機化」(Domain Randomization)技術。這意味著在訓練過程中,系統會隨機擾動環境參數——改變地面的摩擦力、增加感測器的雜訊、甚至是改變機器人的質量分布。
機器人在這種不穩定的環境中學會的控制策略,在部署到實體硬體(如 NVIDIA Jetson 或 Thor 運算平台)後,便能應對現實中不可預見的干擾,實現如 Spot 機器人那樣驚人的穩定性。
整合開發的核心工作流與優勢
在實際開發中,這套流程並非線性,而是循環往復的閉迴路。NVIDIA 的方案讓開發者能在一個受控的環境中完成預訓練與微調:
-
資料合成與預訓練: 在 Isaac Sim 中利用合成資料訓練機器人的視覺與路徑規劃能力,這能避免在現實中因演算法錯誤導致的機械碰撞與毀損。
-
平行強化學習與校準: 透過 Isaac Lab 進行大規模平行訓練,並利用 Real2Sim 獲取的真實資料不斷校準模擬器的參數,提高控制策略在現實世界的泛化能力。
NVIDIA 機器人解決方案核心規格對照表
| 方案名稱 | 核心定位 | 主要特色與優勢 | 整合應用價值 |
|---|---|---|---|
| Omniverse | 數位孿生底層平台 | OpenUSD 格式、RTX 即時光影 | 構建高精度訓練場景與工廠規劃 |
| Isaac Sim | 機器人應用模擬器 | 合成資料生成 (SDG)、感測器建模 | 解決資料標註成本與視覺演算法驗證 |
| Isaac Lab | 機器人學習框架 | 全 GPU 加速強化學習、大規模平行 | 人形機器人步態與複雜動作控制訓練 |
| Jetson / Thor | 實體 AI 運算硬體 | 低功耗高效能 AI 推論 | 將訓練完的模型部署至機器人實體端 |
結語
隨著實體AI 時代的到來,Simulation 不再僅是輔助,而是開發流程的靈魂。NVIDIA 透過 Isaac 平台,打破了傳統機器人開發費時、費力的魔咒。當 Real2Sim 讓模擬更趨近於真實,Sim2Real 讓智慧更具備強韌性,我們距離機器人走進千家萬戶的那一天,已不再遙遠。這是一場關於算力轉化為體力的革命,而模擬技術正是這場轉化的關鍵催化劑。

- 【產業剖析】全球機器人生態系競合趨勢 - 2026/06/22
- 【產業剖析】人形機器人火熱背後的現實難題 - 2026/06/15
- 【COMPUTEX 2026】以「具身智慧界Android」為定位的韓國Circulus - 2026/06/05
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!