感謝原文作者 PJ2000開放授權,使我們得以摘譯本篇文章,而本文所有圖片,皆翻攝自Instructables網站,再次感謝作者開放授權!若讀者想要進一步閱讀原文,請點擊:原文連結,謝謝。
大家好!這篇文章是一步步的指南,教導您如何使用電腦輔助設計工具,設計一台四足機器人。
四足機器人的設計靈感來自於波士頓動力公司(Boston Dynamics)的Spot機器人,它看起來有點像隻狗。設計這台機器人是為了增材製造,且易於使用任何商業FDM/FFF 3D列印機列印。雖然,我計畫親自製作機器人,但這篇教學文將只涵蓋設計階段,而我將很快於另一篇文章中,發布製造四足機器人的一步步過程。
透過這篇文章,我將向您介紹這台機器人的通用設計過程,所以您不必複製我正在建構的內容。藉由運用這篇教學文,您可隨心所欲發揮創意,以創造任何多足機器人。
盼望您享受閱讀這篇文章,並且於留言發佈您的設計。
軟體和設備:
- SolidWorks(設計)
- Visualize(渲染)
- 桌上型電腦/筆記型電腦
- 電腦滑鼠(非必要,但建議具備,將使這項專案更容易完成。)
步驟一:素描概念
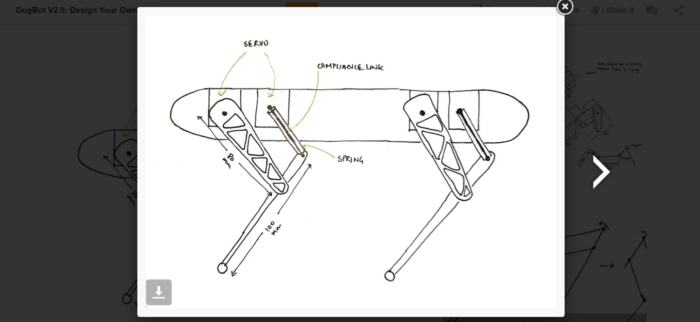
圖一
設計流程的第一步,就是拿出您的素描簿,開始描繪機器人的不同概念。素描本身不必完美,只需要擁有大致形狀,並且形成具備粗略估計尺寸的元件。如同上方的圖一所示,我從非常初級的2D素描概念展開,描繪機器人的基本輪廓,以及肢體尺寸。有了初步構想後,我最終完成了這個靈感源自於狗的機器人的設計,並於小腿具備一個平行驅動機構。之後,我開始描繪更多細節,例如電子設備的放置,腿步的運動學,以及腿部驅動機構等等。我還展示了一些用來詳細構思組件的草圖。
關於細節的描繪,我建議將草圖繪製成3D,以使設計的視覺化效果更好。以下是一些針對產品設計素描的資源:
- TheSketchMonkey’s “3 Important Sketching Exercises for Any Designer (Beginner) – YouTube“
- Sketch a Day’s “Sketch-A-Day – How to sketch complex organic shapes – YouTube“
- Reid Schlegel’s “Sketching Basics 2: Perspective is King – YouTube“
除了詳細的3D草圖,我也鼓勵您繪製元件的粗略草圖,以便有更好的構思。
第二步:匯入/下載電子元件
設計機器人時考慮電子元件,是任何機器人設計過程的重要部分,但如果每一項電子元件皆一一設計,那過程將很乏味。所以,我從GrabCAD獲取大部分的電子元件。Solidworks允許用戶以.STEP、.SLDPRT、.STL等檔案類型,直接匯入預先設計好的電子元件,例如伺服馬達、電池、控制器等進行組裝;而未支援的檔案類型,可使用任何免費的線上轉檔器,將檔案轉換成.STEP或.SLDPRT。
以下是我從GrabCAD匯入的電子元件清單:
- 伺服馬達:Lewansoul LX-16A bus servo | 3D CAD Model Library | GrabCAD
- DC-DC 降壓轉換器:DROK Adjustable DC Buck Converter Model 180078/180080 with built in mount | 3D CAD Model Library | GrabCAD
- 伺服總線連接器:LewanSoul LX-16A Servo Bus Linker | 3D CAD Model Library | GrabCAD
- 電池:TalentCell Rechargeable 12V 3000mAh Lithium Ion Battery Pack | 3D CAD Model Library | GrabCAD
我無法在網路上找到Libre computer (Le Potato)的CAD,所以我自己設計了一個:AML-S905X-CC (Le Potato) | 3D CAD Model Library | GrabCAD
第三步:設計大腿
既然設計素材都預備好了,就讓我們開始設計四足機器人。
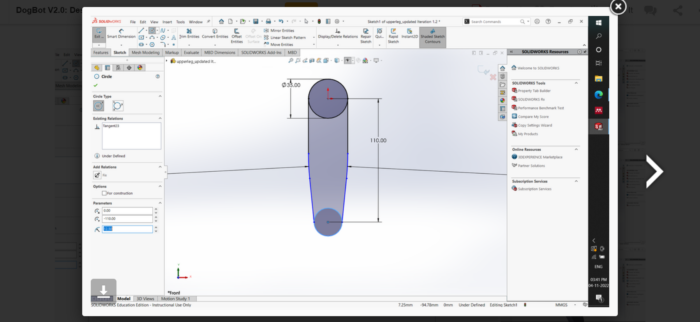
圖二
如圖二所示,為設計大腿,我由基本素描展開。草圖被拉伸成30毫米的厚度。之後,拉伸主馬達軸的介面,並且創造出8個M2機器螺絲的螺絲孔,以安裝馬達連接器,該馬達連接器是在馬達軸和大腿間的連接介面。大腿的基本形狀完成後,針對輔助馬達,我切割出45 x 18毫米插槽;而為了安裝小腿,我切割出50 x 18毫米的插槽。接著,其餘更精細的細節被添加至我們的CAD模型,例如,針對線路管理而設計的槽,輔助馬達支架,以及相關收尾工作。
第四步:設計小腿
為設計小腿,我遵循了類似的流程。首先,我創造出一張基本草圖,其靈感源自於第一步所提到的粗略概念圖。之後,我拉伸草圖,並添加一些更為細緻的細節,例如用於平行聯動機構的槽,以及模組化的腳趾切出。
第五步:組裝腿部
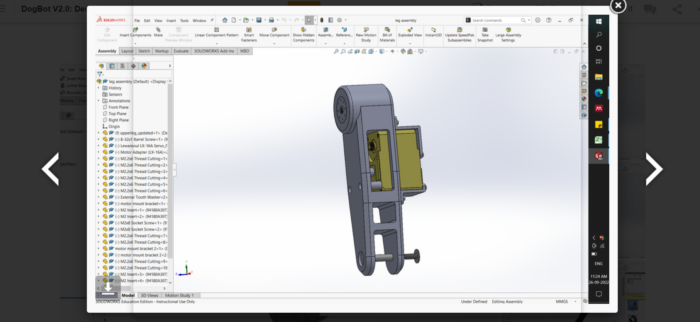
圖三
於此步驟中,我們將組裝剛設計好的大腿與小腿,而2號馬達將被固定於大腿上(圖三)。針對這項目標,我們需要在工作區內開啟這三個元件,並依據設計將它們配合起來。一旦組裝好大腿、小腿及馬達,合規連桿和Servo horn將被建模並添加至組件中。至此,腿部的設計已完成!讓我們進行底座的設計。
第六步:組裝底座
在這個步驟中,我們將把機器人底座的所有元件組裝起來,包括電子元件及電源。
第七步:組裝腿部、底座、外殼,完成四足機器人的設計。
一旦所有元件就定位,我們便將它們組裝起來,四足機器人的設計便大功告成!而我使用Visualize這套軟體,產生高品質的渲染,並且完成這台四足機器人。感謝您的耐心閱讀。
(本文轉載自vMaker,編譯者為江宗諭,原文連結;責任編輯:謝嘉洵)
- 打怪升級!創客必修「飛行器+手把」自造課 成就天空飛翔夢 - 2025/12/24
- Arduino正式加入高通生態系!大廠資源挹注 深化開源與實作精神 - 2025/11/26
- 仍高價搶NVIDIA GPU ?創客新解:用Arduino打造平價平行運算方案 - 2025/10/28
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


