作者:Bird
上一回【Maker電子學】步進馬達的原理與驅動—PART6,我們說明了如何讓步進馬達的轉子卡在兩步中間的「複相激磁」技術,以及它背後的原理與計算。這一回我們要繼續說明 A4988 如何產生複相激磁所需要的電流,來達成微步驅動。
微步進的設定
我們上一回在說明複相激磁的電流時,用了四分之一和二分之一兩個角度做範例,計算出複相激磁所需要的電流,而且由於計算電流會用到向量和三角函數,其實這個電流與角度的等分並非呈線性的關係。
比方說,要讓步進馬達停在兩步的中間,而且產生與單相激磁相同的扭力,則兩相要各通上單相激磁的 0.707 倍的電,而此時兩相加起來的電流會是單相激磁的 1.414 倍,這代表有 0.414 倍的激磁電流被浪費掉了。
要讓步進馬達停在兩步中間四分之一的位置,而且產生與單相激磁相同的扭力,則其中一相要通上單相激磁 0.38 倍的電流,而另一相則要通上單相激磁 0.92 倍的電流,此時轉子的位置會在接近 0.92 倍電流激磁這一相 1/4 步的位置。
要產生這樣的電流變化,需要計算三角函數,因此簡單的電路是做不到的。如果沒有浮點計算的能力,大概就得用查表的方法來得到這些數字,再用數字產生對應的電流,而 A4988 就有內建這樣的功能。
A4988 有三支腳,分別叫做 MS1、MS2、MS3,就是用來設定微步進(microstep)的分割程度。這三支腳有五種有效狀態:

(圖片來源:Bird 提供)
所謂 1/2 步微步進的意思,就是原來的每一步會被分成兩步,也就是說如果這個馬達原來是 200 步轉一圈,就會變成 400 步轉一圈,而 1/16 步微步進就厲害了,原來的每一步都會被分成 16 步,原來 200 步一圈的馬達就會變成 3200 步一圈。
微步進的電流
A4988 的 datasheet 上有畫出各種微步進模式下,兩個相位的電流。我們可以來驗證一下我們之前的計算。
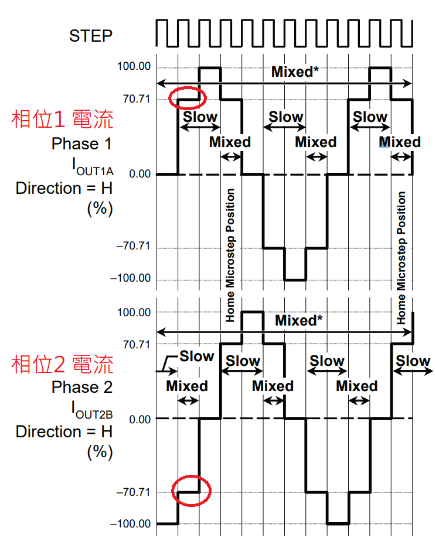
下圖是 A4988 在 1/2 微步進模式下,兩個相位之間的電流變化:
(圖片來源:Bird 提供)
當其中一個相位的電流是 100% 而另一個相位是 0% 時,就是單相激磁,也就是步進馬達原來全步的位置。從圖中可以看出來,在兩個全步中間,會有兩相的電流都是 70.71% 的時候,這就是兩相同時激磁,可以讓馬達的轉子停在兩相中間的位置,而電流的符號則代表電流的方向。
我們之前講過全步激磁時線圈的激磁順序,但沒有講到電流。現在加上電流就是這樣:
- A 線圈正向 100% 驅動
- B 線圈正向 100% 驅動
- A 線圈反向 100% 驅動
- B 線圈反向 100% 驅動
而 1/2 步微步進激磁時,線圈的激磁順序及電流就變成:
- A 線圈正向 100% 驅動
- 同時 A 線圈正向 70.71% 驅動、B 線圈正向 70.71% 驅動
- B 線圈正向驅動 100%
- 同時 B 線圈正向 70.71% 驅動、A 線圈反向 70.71% 驅動
- A 線圈反向驅動 100%
- 同時 A 線圈反向 70.71% 驅動、B 線圈反向 70.71% 驅動
- B 線圈反向驅動 100%
- 同時 B 線圈反向 70.71% 驅動、A 線圈正向 70.71% 驅動
而另一件有趣的事情是,A4988 在全步驅動模式下,並不是用 1/2 步模式下的 1、3、5、7 步,而是用 1/2 步模式下的 2、4、6、8 步,每次都有兩組線圈激磁。這麼做的好處是,如果我們只需要全步驅動,而不需要 1/2 步的話,每一步都有兩組線圈按激磁,而如果我們把兩組線圈的電流都提高到 100%,就可以有單相激磁時的 1.414 倍扭力。
因此 A4988 的全步驅動模式是這樣:
- 同時 A 線圈正向 70.71% 驅動、B 線圈正向 70.71% 驅動
- 同時 B 線圈正向 70.71% 驅動、A 線圈反向 70.71% 驅動
- 同時 A 線圈反向 70.71% 驅動、B 線圈反向 70.71% 驅動
- 同時 B 線圈反向 70.71% 驅動、A 線圈正向 70.71% 驅動
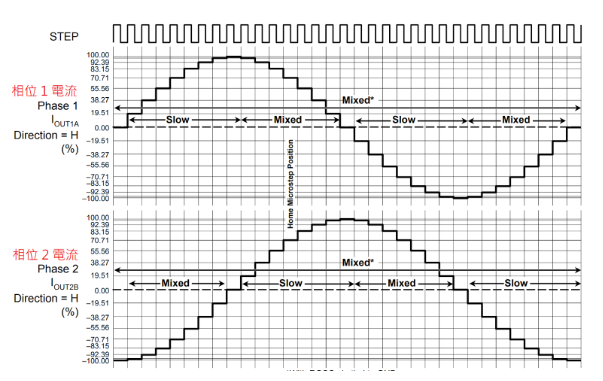
如果我們仔細看 A4988 在 1/8 微步模式下的驅動電流圖,會有一個更有趣的發現:
(圖片來源:Bird 提供)
有沒有覺得這兩個相位的驅動電流就是兩個相位相差 90 度的 sine 波形,或者也可以說一相是 sine 另一相是 cosine?
沒錯,其實我們在上一回計算相位電流時,就已經可以知道這個現象:
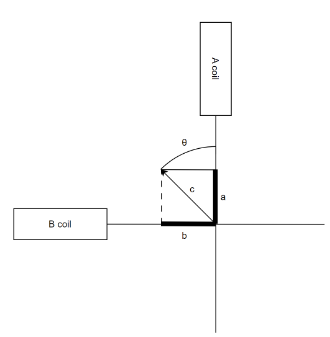
(圖片來源:Bird 提供)
線圈 B 的電流 = c * sin (θ)
線圈 A 的電流 = c * cos (θ)
C 是單相全步激磁的 100% 電流
因此隨著角度 θ 的變化,兩個線圈 A 和 B 的電流必定是 sine 和 cosine 的波形。
小結
這一回我們介紹了 A4988 的微步進設定接腳,以及驗算了 A4988 用來驅動微步進的電流真的如同我們上一回計算的一樣,下一回我們要來說明 A4988 在實際應用上的電路設計,有哪些需要注意的地方。
(責任編輯:賴佩萱)

- 【Maker電子學】Flash 記憶體的原理與應用—PART22 - 2025/02/27
- 【Maker電子學】Flash 記憶體的原理與應用—PART21 - 2025/02/21
- 【Maker電子學】Flash 記憶體的原理與應用—PART20 - 2025/01/24
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


