2026年,全球工業機器人市場正經歷一場從「自動化」到「自主化」的範式轉移。隨著具身智慧(Embodied AI)技術的成熟,機器人不再僅是執行預設指令的機具,而是具備環境理解能力的智慧主體。然而,當運算大腦愈發強大,業界對於「功能安全(Functional Safety,FuSa)」的技術落實也提升到了前所未有的高度。如何在確保極速 AI 推論的同時,滿足工業級的物理安全認證,已成為具身智慧大規模商用化的核心命題。
軟體定義安全:打破 AI 感知與執行控制的藩籬
在傳統的機器人架構中,負責處理視覺感知、路徑規劃的「AI 運算單元」與負責安全保護、緊急停止的「安全控制器」通常是兩個獨立運作的硬體系統。這種架構雖能確保安全性,但在應對具身智慧所需的複雜人機協作時,卻面臨通訊延遲(Latency)與硬體體積過大等挑戰。
當前的技術趨勢正朝向「軟體定義安全(Software-Defined Safety)」演進。透過高性能處理器內部的硬體分區技術,開發者得以在同一顆晶片上運行非安全性的 AI 任務與具備功能安全等級的即時作業系統(RTOS)。這種整合型架構不僅能即時處理多模態(Multimodal)數據,更能確保在 AI 軟體層發生異常時,底層的硬體安全機制能在微秒級內強制接管控制權。
AI 機器人安全控制技術的三大支柱:
-
異質運算隔離(Hardware Isolation): 透過處理器內部的「安全島」設計或虛擬化技術,將安全邏輯與 AI 演算法完全隔離,避免軟體崩潰影響物理制動。
-
動態安全包絡(Dynamic Safety Envelope): 結合 3D 視覺與 AI 推論,實時計算機器人與人類之間的「碰撞剩餘時間」,動態調整運作速度而非僅是死板地停機。
-
黑盒化預認證模組: 業界開始採用模組化設計,將符合 IEC 61508 或 ISO 13849 等規範的安全控制邏輯封裝在專用模組中,以縮短終端產品的認證週期。
技術落實:從視覺感知到物理避障的閉環系統
在具身智慧的落地過程中,最關鍵的技術在於建立「感知-決策-執行」的安全閉環。目前的技術方案多採用高算力的加速運算平台(如 NVIDIA 或 Intel 系列)作為大腦,搭配專用的安全控制器(Safety Controller)作為脊髓。
例如,在最新的機器人開發平台中,AI 視覺可以辨識出環境中的特定人員,並分析其動作意圖(如伸手或靠近)。當預判可能發生危險時,系統不再依賴傳統的實體圍籬,而是透過電子訊號直接改變馬達的輸出扭力。這種技術的落實,標誌著機器人安全從「被動防禦」走向「主動預判」。
以下表格分析了目前市場上兩類主流的安全架構方案:
表一:傳統分離式方案 vs. 現代整合型安全方案
| 比較項目 | 傳統分離式架構 (AI PC + Safety PLC) | 現代整合型方案 (SoC-based Integration) |
| 硬體結構 | 多設備串接,線材與接口複雜 | 單一嵌入式控制器,高度模組化 |
| 通訊延遲 | 較高 (訊號需跨硬體協定傳輸) | 極低 (晶片內總線溝通) |
| 安全性認證 | 組件各自認證,整合後需全系統測試 | 硬體端預認證,減少系統級測試複雜度 |
| 維護成本 | 高 (需維護兩套獨立系統) | 中低 (軟體定義功能,易於更新) |
全球市場觀測:AI 安全已成具身智慧標配
根據 2026 年工業 4.0 演進報告,AI 安全不再僅是合規要求,更是產品競爭力的展現。在服務型機器人、人型機器人與新一代自主移動機器人(AMR)領域,技術落實的優劣直接影響到產品能否進入醫療、養老等對安全性極度敏感的市場。
目前全球半導體龍頭如 NVIDIA 與 Intel,皆已在硬體底層植入大量支援功能安全(FuSa)的指令集,這使得下游開發商能更輕易地將複雜的 AI 模型與嚴苛的工業安規相結合。
表二:2026 年邊緣 AI 安全平台技術分級
| 技術等級 | 運算平台類型 | 核心安全技術 | 適用領域 |
| 高等級 (High Performance) | 專用 AI 加速架構 (如 GPU Cluster) | 外掛式硬體監控 + 即時冗餘運算 | 人型機器人、精細協作醫療手術 |
| 中等級 (Mainstream) | 通用型邊緣運算 SoC | 處理器內部安全島隔離 (FuSa Core) | 工業用 AMR、智慧倉儲設備 |
| 輕量級 (Low Power) | 高效能微控制器 (MCU) | 軟體看門狗 (Watchdog) + 基礎感知器控制 | 導覽機器人、家用掃地機 |
結語
AI 機器人的未來不僅取決於它能「學會」多少複雜動作,更取決於人類對其「安全性」的信任度。隨著功能安全與 AI 感知在硬體層面的融合日益加深,落實標準化的安全技術路徑,將是推動具身智慧從封閉實驗室走向開放社會環境的關鍵一環。
》延伸閱讀:
-
國際標準組織 (ISO):ISO/TR 9241-810:2024 Ergonomics of Human-System Interaction — Robotic Systems
-
國際機器人聯合會 (IFR):Top 5 Global Robotics Trends 2026
-
TÜV SÜD 技術白皮書:Functional Safety in Human-Robot Collaboration
-
Intel 技術白皮書:Intel® Functional Safety Architecture for Industrial Computing
-
IEEE Xplore 技術期刊:Edge AI-driven Safety Control in Industrial 5.0 Environment (2025 Edition)
- NVIDIA GTC 2026 技術議程:Extend Robot Perception With Industrial Safety Agents
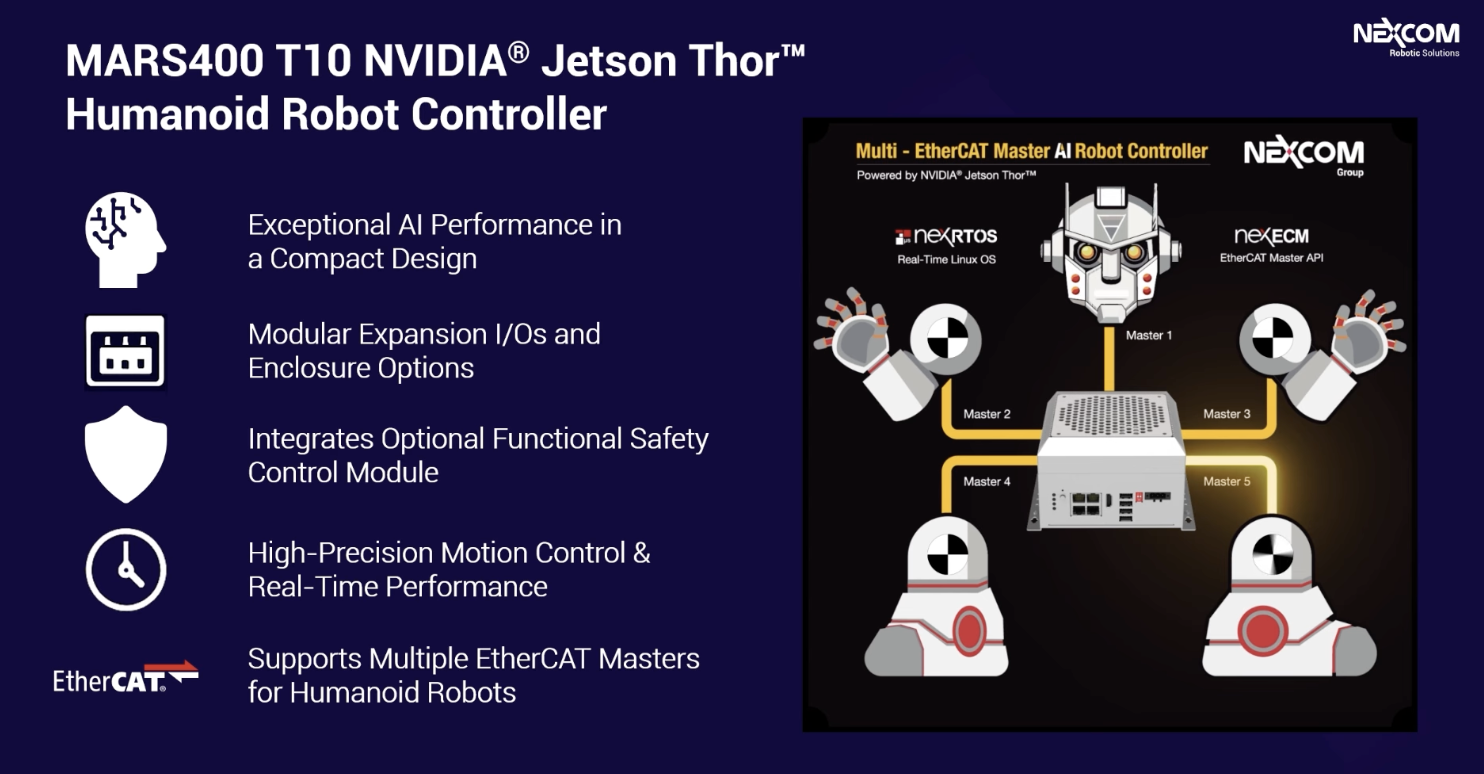
- NexCOBOT 官方技術文件:MARS400 T10-05 – Robotic Controller NVIDIA® Jetson Thor™

- AI 機器人如何落實安全性控制 - 2026/04/02
- 簡化AI機器人訓練 Universal Robots與Scale AI推出模仿學習系統 - 2026/04/01
- 【Podcast】看見地球的真相:SkyTruth 用 AI 監控人類行為 - 2026/04/01
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


