
長期以來,截肢者在使用仿生義肢時,最大的痛苦並非失去肢體本身,而是那份沉重的「認知負擔」。為了抓起一個水杯,使用者必須全神貫注地透過殘肢肌肉發出精確電訊號,大腦像是在操作一台複雜的起重機。然而,猶他大學(University of Utah)近期發表於《Nature Communications》的一項突破性研究(相關報導),宣告了「AI 共享控制」時代的到來。透過人工神經網路與接近感測技術,仿生手不再只是冷冰冰的工具,而是一個能「預判」環境並具備「反射動作」的智慧器官。

Utah NeuroRobotics Lab研究團隊(圖片來源)
數位觸覺的覺醒:從「碰撞後反應」到「預判式抓握」
傳統仿生手的運作邏輯是後驗的(Reactive)。使用者必須先下達指令,讓手指接觸物體,再透過壓力感測器調整力道。這種滯後性導致了動作的僵硬與緩慢。猶他大學研究團隊透過 AI 技術,將抓握過程提前到了「接觸前」。
其核心技術在於整合了光學接近感測器(Optical Proximity Sensors)。這些感測器安裝在 TASKA 仿生手的指尖,利用紅外線測距原理。AI 系統的核心——人工神經網路(Artificial Neural Network;ANN),會即時接收這些微秒級的距離數據。當手部靠近物體時,神經網路會分析物體的幾何邊緣與方位,自動計算出每根手指應有的曲率。
這種「預判式抓握」模擬了人類大腦的潛意識模型。當我們伸手拿咖啡杯時,大腦會自動根據視覺資訊調整手指張開的角度,這就是所謂的「前饋控制」。AI 成功地將這種生物本能數位化,讓仿生手在觸碰物體的一瞬間,就已經處於最穩定的幾何位置。
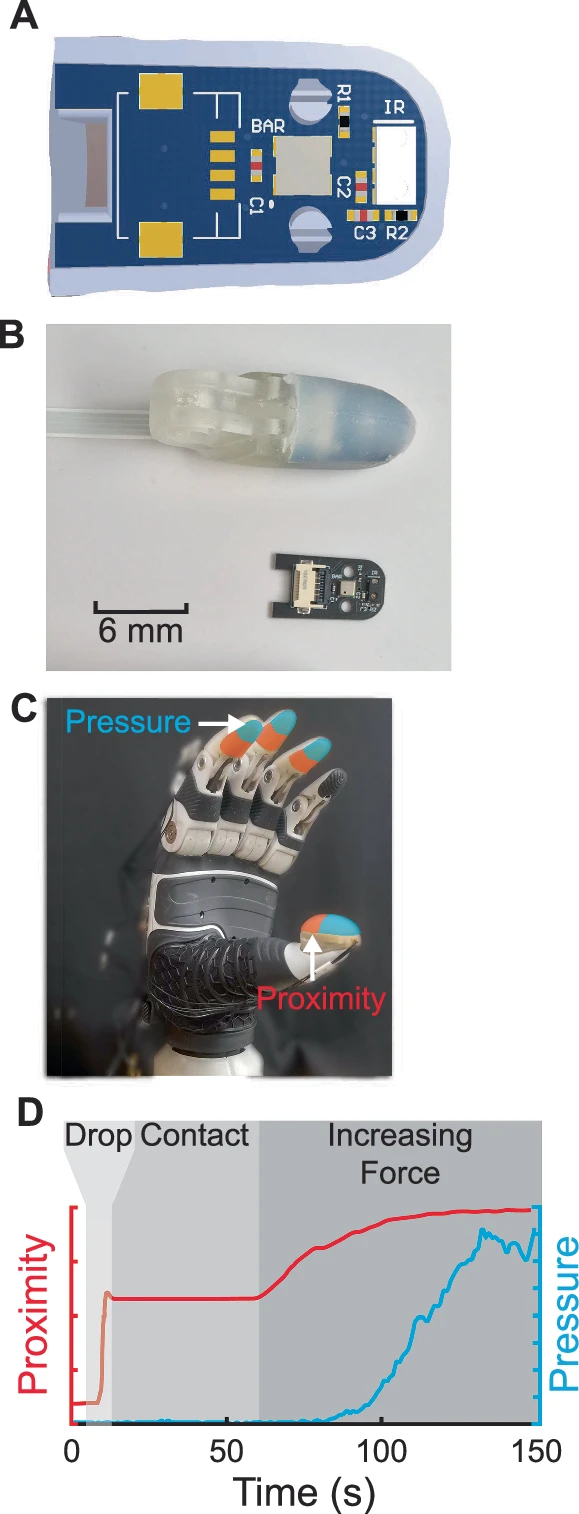
A.將紅外線感測器和氣壓感測器嵌入PCB板中,分別用於測量物體接近度和受力。 B .該PCB板被封裝在定制的指尖內。 C .然後將該指尖改裝到商用義肢手上。 D .嵌入式感測器可以偵測到與物體的複雜交互,例如棉花落在手上。當棉花落下並接近手時,接近信號(紅色)迅速增強。即使棉花對手部產生的力幾乎為零,接近訊號仍然保持在較高水平,表明存在接觸。當對棉花施加更大的力時,隨著矽膠指尖的形變,壓力訊號(藍色)和接近訊號均會增加。請注意,隨著施加力的增加,接近訊號先於壓力感測器增強,並且在接近訊號飽和後,壓力訊號會繼續增強。(圖片來源)
共享控制策略:人機主導權的精妙平衡
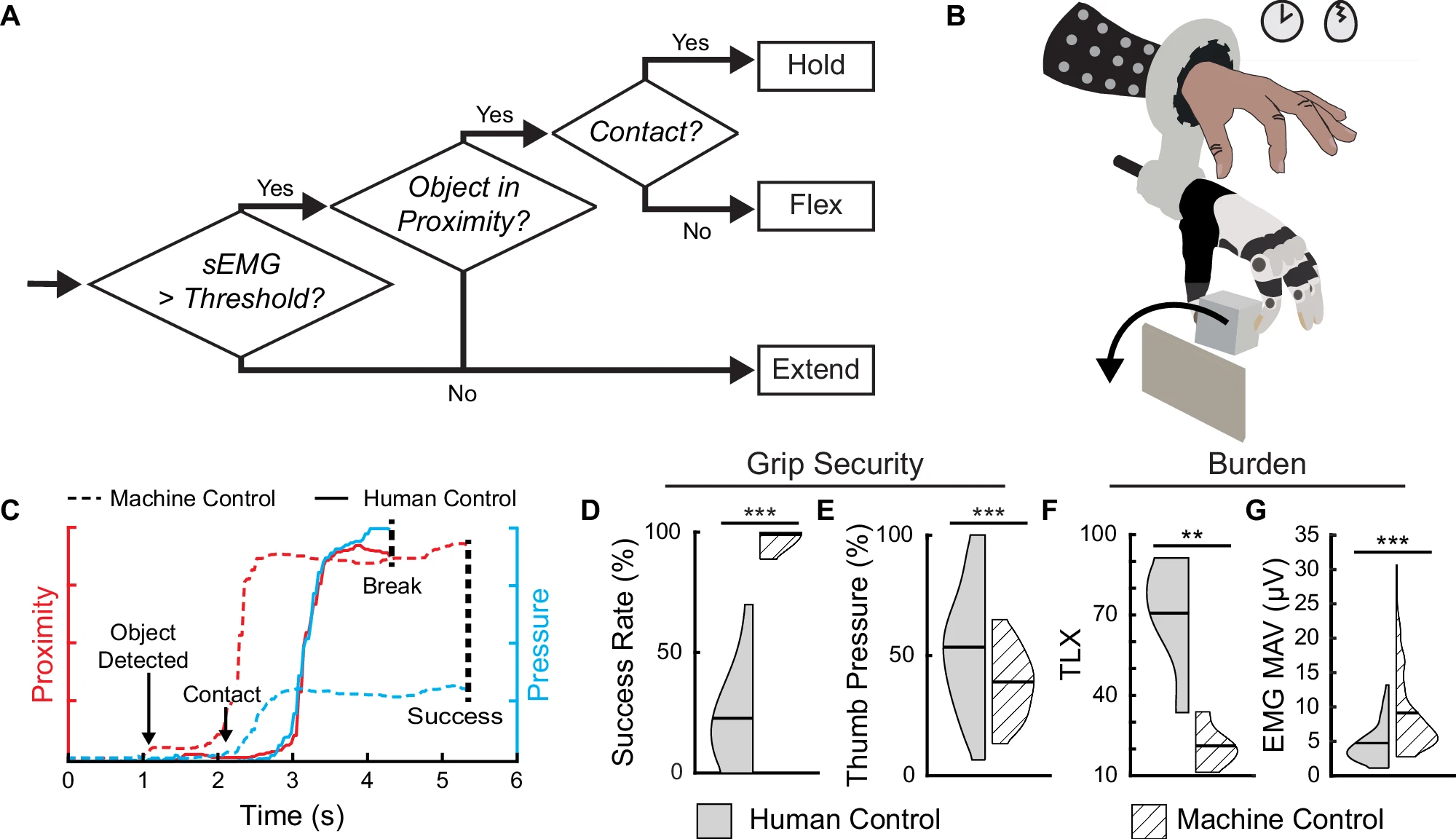
這項技術最引人入勝的落實點,在於它解決了「人機衝突」的難題。研究團隊開發了一種「生物啟發的動態加權共享控制(Bio-inspired Dynamically Weighted Shared Control)」算法。
在過去,若 AI 自動化程度太高,使用者會感覺失去對身體的控制;若太低,則無法減輕負擔。這套 AI 算法扮演了協調員的角色:
-
環境優先權: 當指尖感測器偵測到物體在抓取範圍內(幾公分內),AI 佔據較高的權重(例如 70-80%),負責微調手指的精確對準。
-
意圖優先權: 當使用者的肌電信號(sEMG)展現出強烈的擴張或收縮意圖時(例如想中途放棄抓取或換個姿勢),AI 的權重會瞬間下降,將控制權 100% 交還給使用者。
這種機制讓簡單的任務(如喝水、撿拾小螺絲)變得真正簡單。受試者在實驗中表示,他們不再需要「盯著手指看」,可以一邊聊天一邊完成抓握,認知負荷大幅下降。
軟硬體的核心落實:邊緣運算與閉環系統
要讓 AI 展現靈巧度,運算速度是關鍵。若 AI 判斷需要 0.5 秒,人類就會感覺到明顯的延遲。研究團隊將 AI 模型微縮化,落實在邊緣運算處理器上。這意味著所有神經網路的推論都在義肢內部完成,不需依賴外部電腦。
此外,AI 技術還落實了「自動壓力補償機制」。當抓握完成後,AI 會持續監控壓力感測器的回饋。如果物體開始滑動(壓力分布改變),AI 會在使用者尚未察覺前,自動增加伺服馬達的扭力。這種「反射弧」的建立,是仿生手走向成熟商品化的必經之路。
仿生手技術方案對比表:猶他大學 vs. 市場競爭對手
以下表格整理了目前全球頂尖的仿生手技術差異點。
| 比較項目 | 猶他大學 (TASKA 改裝版) | Esper Bionics (Esper Hand) | Atom Limbs (Atom Touch) | Psyonic (Ability Hand) |
|---|---|---|---|---|
| 核心 AI 技術 | 共享控制與接近感測 ANN | 雲端行為模式預測與學習 | 高自由度神經路徑解碼 | 力反饋閉環控制算法 |
| 感測器亮點 | 光學接近感測器 (預判距離) | 高解析度肌電信號陣列 | 神經接口 (Nerve Interface) | 防水多點觸覺壓力感測 |
| 靈巧度表現 | 極佳,具備自動對準功能 | 優良,隨使用時間變得更準 | 頂尖,具備 20+ 個自由度 | 優良,強調抓取穩定性 |
| 商業化程度 | 實驗室原型 (TRL 6-7) | 已上市 (獲時代雜誌最佳發明) | 開發中/預購階段 | 已上市 (強調耐用性) |
| 主要優勢 | 降低認知負荷,無需長期訓練 | 外型時尚,具備個體適應性 | 最接近真手的生理結構 | 具備真實觸感反饋,極其堅固 |
結語:從工具到肢體的最後一哩路
猶他大學的研究不僅是一場技術秀,它指出了仿生學的未來方向:「自主抓握」與「人類意圖」的深度融合。隨著感測器精度的提升與邊緣算力的增強,未來的仿生手臂將不再是需要苦練才能駕馭的機械,而是具備自我意識與預判能力的智慧夥伴。當 AI 能夠承擔 90% 的瑣碎運算,截肢者才能真正找回那份「動念即所得」的生命尊嚴。
(責任編輯:歐敏銓)
》延伸閱讀
-
Nature Communications: Shared human-machine control of an intelligent bionic hand improves grasping and decreases cognitive burden for transradial amputees (Original Study)
-
Neuroscience News: AI-Powered Bionic Hand Restores Natural, Intuitive Grasping Ability
-
University of Utah: The NeuroRobotics Lab – Research on Bionic Arms

- 從VLA到落地部署:拆解新世代機器人開發關鍵路徑 - 2026/03/24
- 【Podcast】分散式代理時代:2026 Edge AI 技術全解析 - 2026/03/24
- 英飛凌攜手NVIDIA以數位孿生技術加速部署安全可靠的機器人 - 2026/03/24
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


