作者:歐敏銓
在德國埃斯林根(Esslingen)的 Festo 研發總部,機器人不再只是冷冰冰的鋁合金手臂。透過「仿生學習網路」(Bionic Learning Network),Festo 成功將大自然數億年的進化智慧轉化為自動化技術。從螞蟻的協作行為到蜜蜂的集群飛行,AI 的導入讓這些仿生裝置從「模擬外型」跨越到「自主決策」的新紀元。這場由 AI 驅動的仿生革命,正悄悄預告著未來智慧工廠的運作邏輯。
自 2006 年正式建立「仿生學習網路」以來,Festo 始終秉持一個核心理念:大自然是世界上最高效的工程師。在自動化領域中,移動、抓取、定位與能量管理是核心挑戰,而生物界早已演化出最精簡、高效且耐用的解決方案。
Festo 進行仿生研究的目的並非單純為了製造玩具或展示品,而是為了測試新技術、輕量化材料以及最重要的——智慧化的控制系統。早期機器人依賴預設程式碼,無法應對多變的環境;然而,現代工業 4.0 需要的是能像生物一樣「自適應」的系統。透過導入人工智慧(AI),機器人不再只是執行死板指令,而是能透過感知器吸收環境資訊,利用演算法進行即時判斷,這正是 Festo 致力於仿生學與 AI 跨界融合的初衷。
以下分別針對陸、海、空的一個專案做個介紹:
陸地:BionicANTs(仿生蟻)的集體運算邏輯
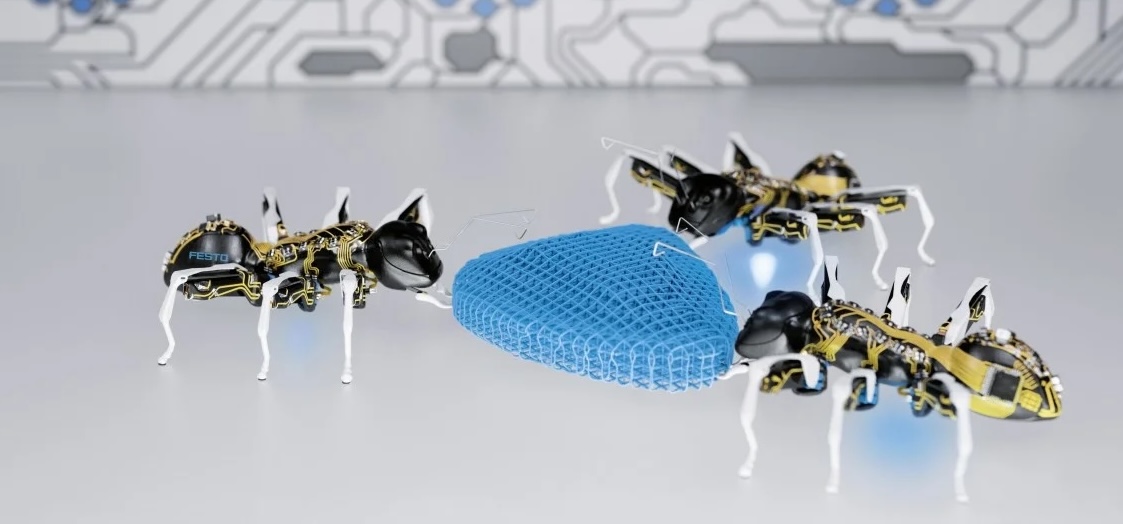
在 Festo 的實驗室中,一群約掌心大小的機器螞蟻展示了驚人的協作能力。這項專案名為 BionicANTs,其重點不僅在於模仿螞蟻的解剖構造,更在於轉化其「群體智慧(Swarm Intelligence)」。
-
仿生與構造落實: BionicANTs 的身體構造結合了 3D MID 工藝,將電路直接燒結於結構表面,大幅減輕重量並整合了感測器。其腿部利用壓電技術(Piezo technology),能以極低能耗實現快速精準的擺動。
-
AI 決策與協作: 每一隻仿生蟻都具備獨立的處理能力。在 AI 技術的應用上,Festo 採用了分散式控制演算法。與傳統由中央電腦下達指令不同,BionicANTs 是根據簡單的行為準則進行「去中心化」決策。當一隻螞蟻發現目標物太重時,它會透過頭部的 3D 相機與紅外線感測器,向鄰近同伴發出無線信號,集體調整移動角度與力道。
這種基於行為的 AI 模式,展示了分散式系統如何透過個體間的簡易互動,解決複雜的物流搬運難題。這與未來工廠中,不同設備、工件之間能自動協商生產路徑的願景不謀而合。
》延伸閱讀:BionicANTs: Cooperative behaviour based on a natural model
-
註:文中詳述了螞蟻如何透過相互溝通達成集體決策,這是群體智慧 AI 的典型應用。
空中:BionicBee(仿生蜂)的自主集體飛行
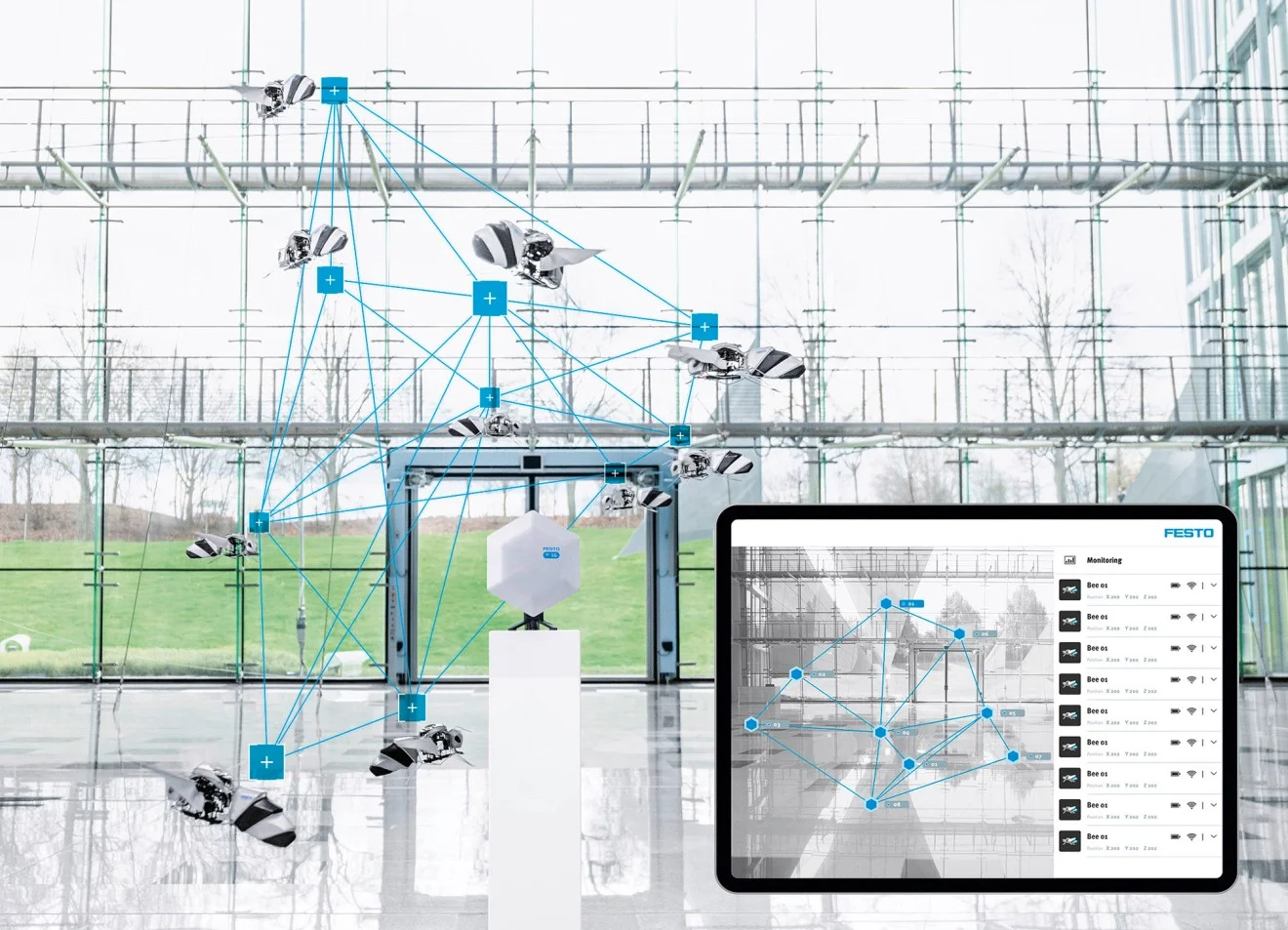
2024 年漢諾威工業博覽會上,BionicBee 驚艷全場。它是 Festo 目前體型最小的自主飛行集群,重量僅 34 公克,卻能在大空間內實現密集、不碰撞的集體飛行。
-
AI 驅動的自校準與適應: BionicBee 的核心 AI 挑戰在於「Sim-to-Real」的轉移與硬體補償。由於每隻仿生蜂都是手工組裝,微小的重量偏差或關節磨損都會導致飛行偏差。為此,研發團隊開發了自動校準演算法。每隻蜜蜂在短暫的試飛後,AI 會分析其飛行數據,並自動調整專屬的控制器參數,使整個集群能像單一實體般受控。
-
室內定位與路徑規劃: 透過超寬頻(UWB)技術,AI 系統在室內架設 8 個定位基站。AI 會在毫秒級的間隔內處理數十隻蜜蜂的座標資訊,動態規劃飛行路徑。當受到氣流干擾時,AI 演算法能即時計算出修正路徑,確保集群在高速動作中依然保持完美的間距。
BionicBee 不僅是飛行表演,它所驗證的「大規模自適應集群技術」,正是未來倉儲管理中,微型無人機群進行自動巡檢與分揀的核心技術支撐。
》延伸閱讀:BionicBee: The smallest flying object in a swarm
-
註:網頁中明確提到為了補償硬體製造差異,系統會自動進行參數校準,並由中央電腦協調群體飛行,避免碰撞。
海洋:AquaJellies(仿生水母)的湧現行為
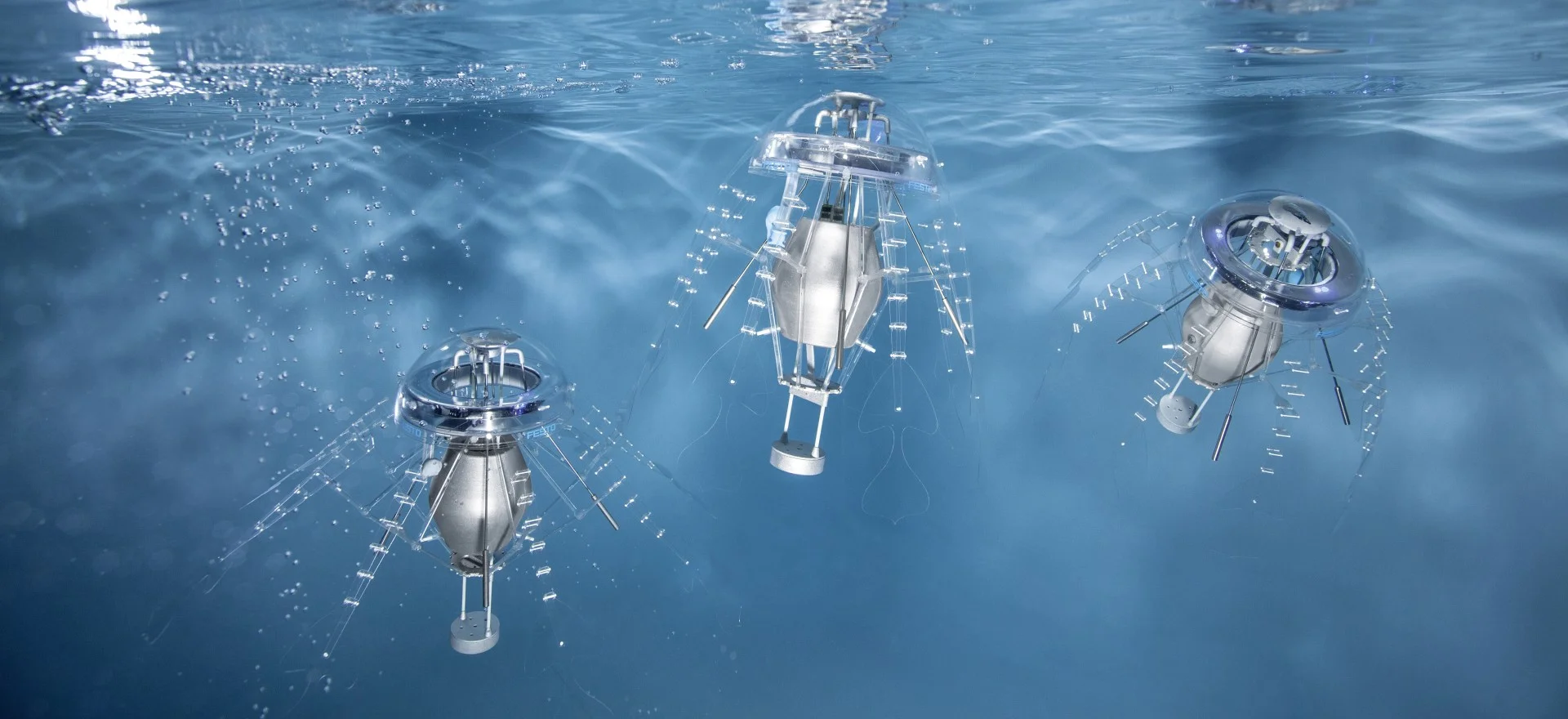
在深藍色的水箱中,AquaJellies 展示了生物在三維流體環境中的自主生存智慧。這款仿生水母完美呈現了如何利用有限的感知能量,在不規則環境中達成和諧。
-
自主決策與能源管理: AquaJellies 搭載了基於強化學習(Reinforcement Learning)精神的行為邏輯。它不需要人工導航,而是根據內部的傳感器(如壓力計與光感器)自主決定游動方向。當能量不足時,AI 會驅動水母游向水面或特定的充電樁進行對接。
-
湧現行為(Emergence): AquaJellies 的 AI 架構模擬了水生生物的「湧現性」。單體水母遵循「避障」與「趨光」等簡單指令,但當多隻水母在同一空間時,透過內部的紅外線感測器,它們能產生類似魚群的集體游動模式。這種「由簡入繁」的 AI 邏輯,大幅降低了控制複雜系統所需的運算資源,為水處理技術中的自主監控節點提供了絕佳模型。
》延伸閱讀:AquaJellies 2.0: Autonomous swarming behavior in the water
-
註:此處介紹了水母如何利用感測器數據進行自主充電決策,以及群體間的紅外線通訊協作。
Festo 仿生專案技術特性比較表
以下彙整三項專案在仿生特性與 AI 技術落實上的差異:
| 專案名稱 | 仿生原型 | 核心 AI 技術 | 技術突破點 | 工業應用展望 |
|---|---|---|---|---|
| BionicANTs | 螞蟻 (Ants) | 分散式控制、群體智慧 | 3D MID 電路整合、壓電驅動 | 智慧工廠自主物流協作 |
| BionicBee | 蜜蜂 (Honeybee) | 自動參數校準、UWB 路徑規劃 | 衍生式設計 (Generative Design) | 微型飛行器環境監測與搜尋 |
| AquaJellies | 水母 (Jellyfish) | 自組織行為、能量感知 AI | Fin Ray Effect® 觸鬚、紅外線通訊 | 水技術領域分散式自主監控 |
結語
Festo 的仿生學習網路向我們揭示了一個事實:AI 的最高境界並非取代人類思考,而是轉化生物在演化中累積的生存智慧,讓機器具備「彈性」與「韌性」。
從 BionicANTs 的團隊精神,到 BionicBee 的自我精準修正,再到 AquaJellies 的優雅協調,AI 技術成功賦予了這些機械裝置一種「仿生本能」。對 Festo 而言,這些專案不只是視覺饗宴,更是未來自動化系統的壓力測試。當 AI 與仿生硬體深度整合時,我們看到的將不再是單一、孤立的機械運作,而是一個充滿智慧、能自我學習、且能與人類和諧共存的新型工業生態系。
》延伸閱讀:
-
Festo Bionic Learning Network 官方網站 (中文)
-
BionicBee 專案特寫 (英文)
Festo BionicBee: Autonomous Swarm Behavior with UWB Technology
-
BionicANTs 技術細節與製造工藝
-
AquaJellies 2.0 能源與通訊技術說明
AquaJellies 2.0: Autonomous Swarming and Real-time Diagnostics
-
Reinforcement Learning in Robotics (Festo BionicSoftHand 案例研究)

- 【產業觀察】Intel在VLA機器人市場的佈局與契機 - 2026/03/27
- AI如何讓機器人更有「人」味:跨越雙手協同鴻溝! - 2026/03/17
- 2026 Edge AI MCU技術趨勢與廠商方案現況比較 - 2026/03/12
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


