作者/圖片來源: CIRCUS Pi

實作原理
平衡車運作原理主要是建立在一種被稱為「動態穩定」的基本原理上,也就是車輛本身的自動平衡能力。
以內置的精密固態陀螺儀來判斷車身所處的姿勢狀態,透過精密且高速的微處理器計算出適當的指令後,驅動馬達來做到平衡的效果。
知識補給站
平衡車駕駛方法類似人體自身的平衡系統,當身體重心前傾時,為了保證平衡,需要往前走,重心後傾時,則同理運作。
同時,電動平衡車的轉向由把手握及伸縮杆來實現,擺動把手會連帶著伸縮杆使車輛左右兩個車輪產生轉速差(例如:伸縮杆向左擺動時,右輪的轉速會比左輪快),達到轉向的效果。
車輛的動力來源是一個鋰電池,單次充電可有 20 ~70 km 的續航里程和 20km 的最高時速。
在騎行時,將方向操縱杆指向需要前進的方向,車體將會朝著指向的方向行駛。
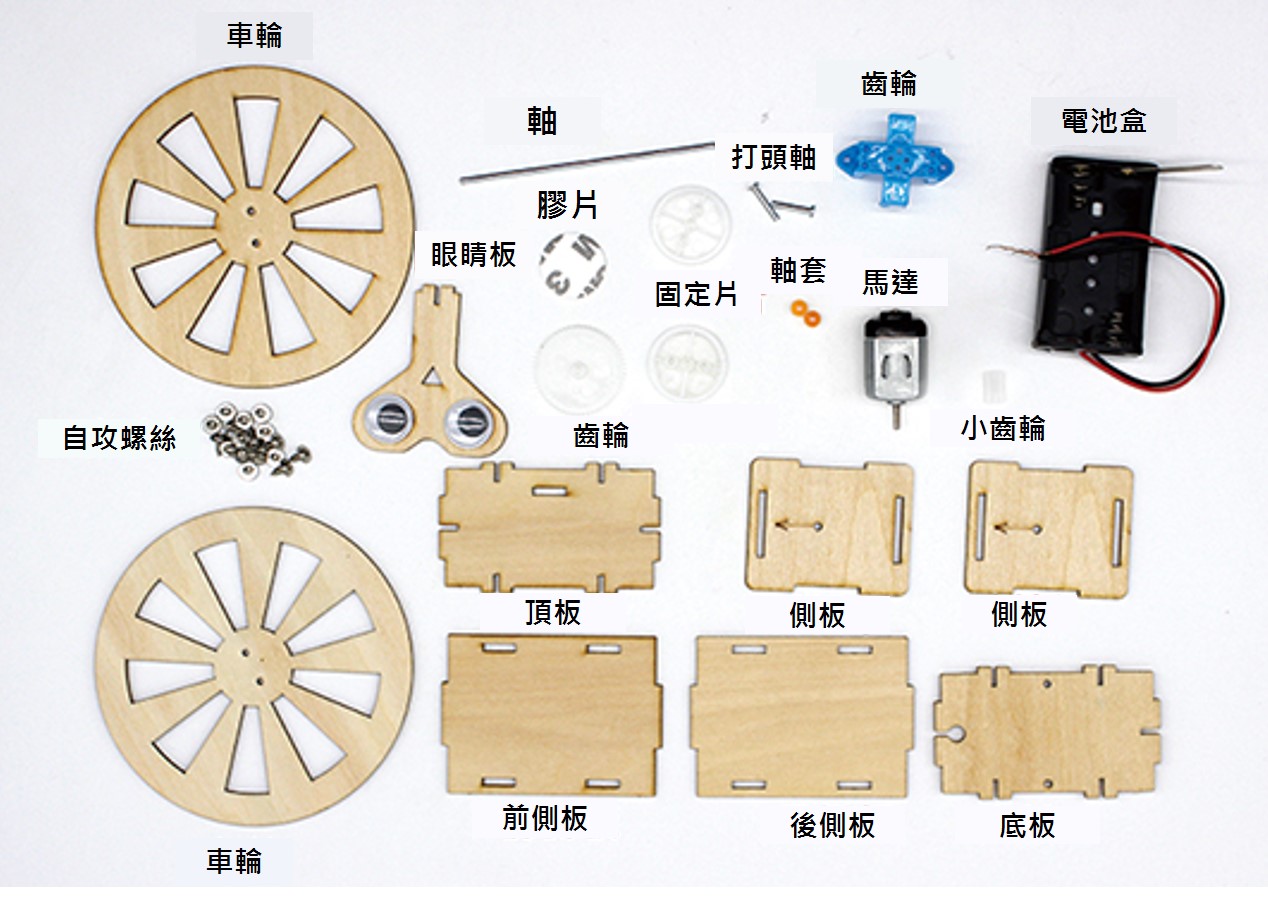
材料清單
組裝說明
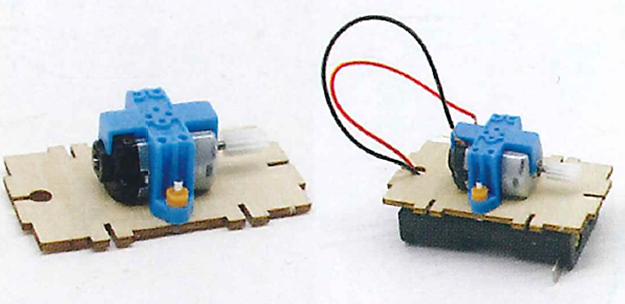
步驟 1
把馬達和馬達套用打頭軸和軸套固定在底板上方。在馬達軸上安裝齒輪,電池盒黏在底板下,把電池盒的電線整合在小孔洞中,再與馬達連接。
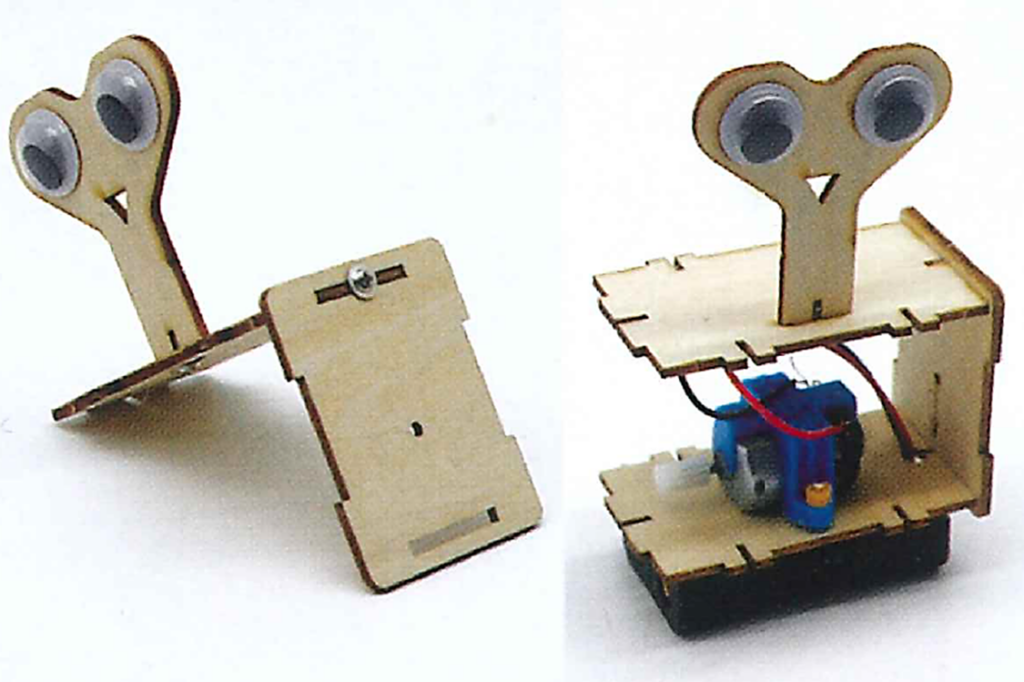
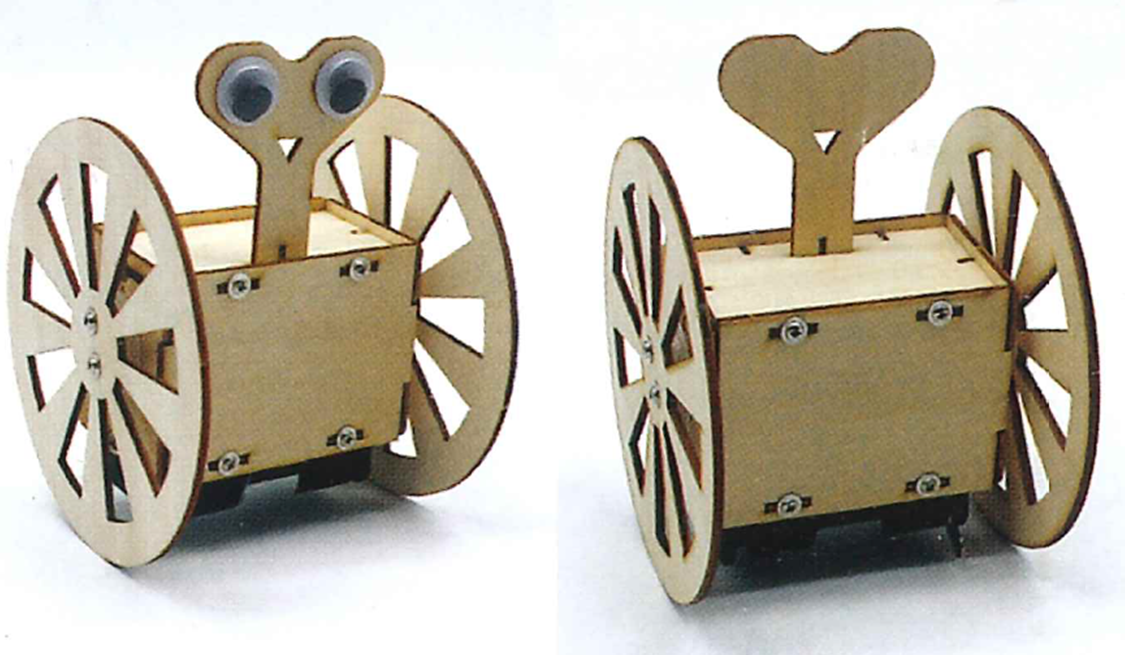
步驟 2
把眼睛板安裝在頂板上,用自攻螺絲固定,並安裝側板。把裝好的底板安裝在側板上,用自攻螺絲固定。
 步驟 3
步驟 3
把固定片和車輪用自攻螺絲固定。
 步驟 4
步驟 4
在軸上安裝齒輪並將其安裝在兩個側板中間,與小齒輪銜接,側板用自攻螺絲固定。將安裝好的車輪固定在軸的兩邊。
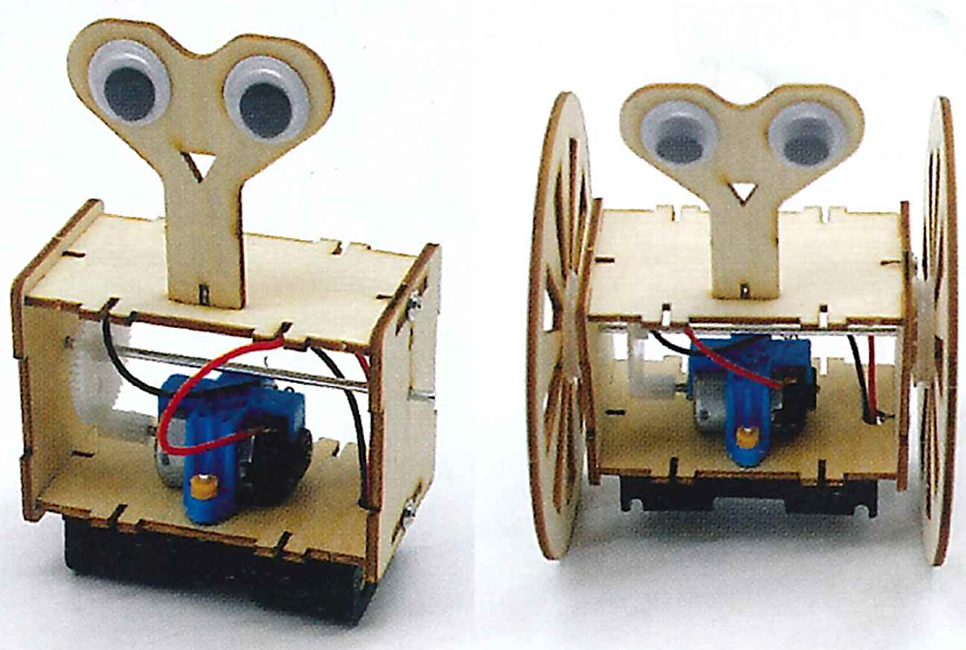
步驟 5
把前側板和後側板安裝在相應位置用自攻螺絲固定就完成囉!
(本文經同意轉載自CIRCUS Pi、原文連結;責任編輯:謝涵如)

Latest posts by CIRCUS Pi (see all)
- 【CIRCUS Pi】ESP32教學系列:用ESP32玩91段電子紙 - 2025/03/24
- 【CIRCUS Pi】ESP32教學系列:硬體中斷 - 2024/12/25
- 【CIRCUS Pi】使用 Arduino UNO R4 WiFi 輕鬆製作 LED Matrix 動畫 - 2024/10/14
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


