作者/圖片來源:CIRCUS Pi
Mbitbot Mini 是 CIRCUS Pi 為了 Micro:bit 所做的輕量級擴展版,讓你可以輕鬆製作更多元的專案 ! 這次我們就利用 Microbit上的加速計,製作一個方向盤吧!
材料準備
若想要配合 Mbitbot小車一起遊玩,則需要多準備MbitBot小車套件包(含MbitBot,micro:bit )。

Mbitbot 小車 組裝方法在官網上可自行查看喔!
- 工具:焊接工具、鑷子、十字螺絲起子

一切準備就緒後,我們就可以開始組裝方向盤囉!
組裝教學
1. 首先準備好方向盤

這裡要先與大家定義好方向盤的上下方與正反面位置。
在後面的組裝教學中,方向盤的上方,指的是擁有「CIRCUS Pi」的 Logo 圖案。 正面指的是有雕刻按鈕位置的那一面,如下圖所示。

2. 擺放按鈕與船型開關位置
按鈕可依照慣用手的習慣,自行選擇放在右方或是左方的按鈕孔洞;船型開關則是用來控制小車的前進或後退方向,因此可依照個人喜好,擺放至左方或右方的孔控。船型開關的方向,可以等之後再修改程式碼即可。本次教學以「開(1)」的方向朝向上方擺放。

3. 焊接按鈕、船型開關與杜邦線
在翻到反面之前,我們可以先「小心地」將船型開關押進方向盤的孔洞,請不要太過大力壓入方向盤,避免壓克力斷裂。 接著,我們可以將方向盤翻面,請注意按鈕需要壓著不放,避免掉落。在方向盤的反面,我們可以先利用錫絲,將按鈕與壓克力板焊接,以錫絲固定住按鈕。之後,再將母端杜邦單頭線焊接。
線材部分若有需要,可自行將黑色線條移除;若不移除後續需要自行將黑色線條固定。
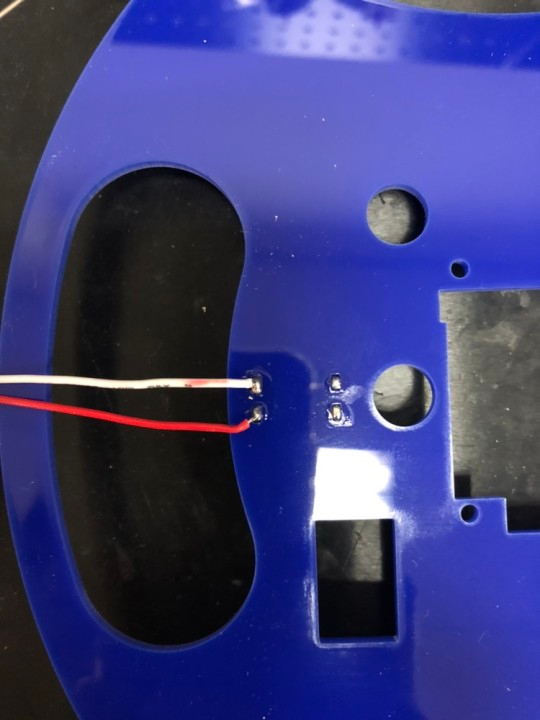
接下來,再將船型開關與母端杜邦單頭線焊接。

焊接的步驟就完成囉!
4. 安裝 Mbitbot mini
焊接好按鈕與船型開關後,便可以將方向盤轉回正面,利用4個M3 螺絲與M3 螺帽,將 Mbitbot mini 鎖進方向盤正中央的孔洞。

5. 將按鈕的杜邦線接上Mbitbot mini
在後面提供的範例程式中,按鈕的腳位為 0號腳位、船型開關的腳位為 8號腳位。杜邦母座接上 Mbitbot mini 時,除了接地的黑色線之外,將訊號腳位與電源輸出腳位接上杜邦母座就可以了。 注意 : 杜邦母座無法彎曲,因此若是過緊無法順利放入排插,請勿過度用力擠壓排插針頭。可再多整理杜邦母座線條,以便延伸線材長度。

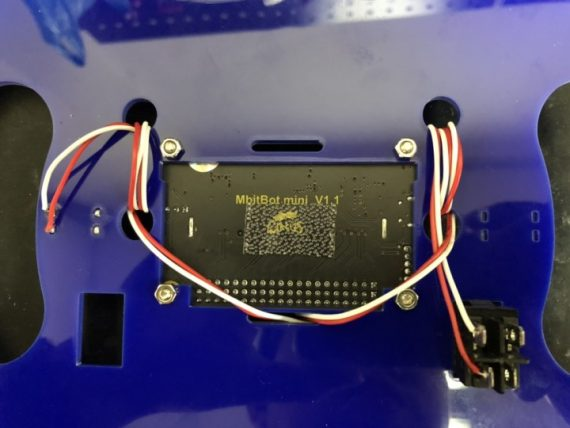
6. 以魔鬼氈將電池、Mbitbot mini 黏著


7.最後將 Microbit 放入 Mbitbot mini 擴展版,方向盤就組裝完成拉~!

迷你麵包板可依照個人需求,若是需要額外增加功能,再放入即可。 本範例並無放入迷你麵包版。
範例程式
在範例程式中,使用了較多的副程式與變數,這是為了方便大家更快速地修改參數、調整方向盤或是 Mbitbot 小車的靈敏度。
若是對於 Micro:bit 上的加速計不太理解,可以參考阿玉Micro:bit 研究區這篇文章 。
在設計加速計、小車移動的相關程式時,我們皆需要先自行定義出裝置的座標軸方向。
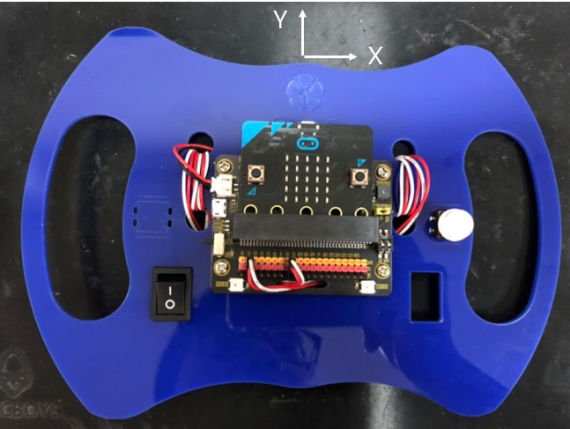
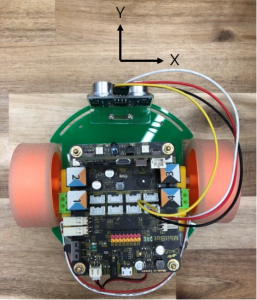
座標軸定義完成後,底下列出每個副程式的定義:
- controller:方向盤的設定。
- Mbitbot_car:Mbitbot小車的設定。
- button:定義方向盤按鈕與船型開關的觸發事件。
- Calculate_pitch:計算加速計的pitch值 與 LED Y軸的相依關係、計算加速計的pitch值與Mbitbot 小車 Y軸移動方向速度的相依關係。
- Calculate_roll:計算加速計的roll值 與 LED X軸的相依關係、計算加速計的roll值與Mbitbot 小車 X軸移動方向速度的相依關係。
- Calculate_ax 、Calculate_ay:定義加速計與 Mbitbot小車的運動方程式。此副程式仍在校正中,可先略過。
- show_information:定義 Micro:bit 上的 LED矩陣的顯示方式。
- car_move:Mbitbot 小車的第一種移動方法,不須使用按鈕即可以移動。
- car_move2:Mbitbot 小車的第二種移動方法,需使用按鈕移動。
看完各個副程式的定義後,接下來我們僅需要在「當啟動時」、「重複無限次」放入相應的參數設定與副程式就可以了。
1. 當啟動時
放入小車的各種參數,其中要注意的是「廣播群組設定」與「tau」值。「廣播群組設定」需與 Mbitbot 小車的設定一樣;tau值則是Mbitbot小車左、右輪在轉彎時的速度差異值,數值越大,Mbitbot 小車就越靈敏。
2. 重複無限次
須根據現在要下載的裝置,分別下載 controller 與 Mbitbot_car 兩個副程式。例如,現在想要下載程式到方向盤,則需要放入 controller 副程式 ; 想要下載程式到 Mbitbot 小車,需放入 Mbitbot_car 副程式。
下載完成後,便可以開始使用方向盤,查看 Microbit 上的 LED燈, ,來修正並遙控 Mbitbot 小車囉 !
(本文轉載自CIRCUS Pi、原文連結;責任編輯:王姵文)

- 【CIRCUS Pi】ESP32教學系列:用ESP32玩91段電子紙 - 2025/03/24
- 【CIRCUS Pi】ESP32教學系列:硬體中斷 - 2024/12/25
- 【CIRCUS Pi】使用 Arduino UNO R4 WiFi 輕鬆製作 LED Matrix 動畫 - 2024/10/14
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


