利用坊間相容於Arduino的遙控車底盤、馬達、車輪組套件以及馬達控制器模組;再透過LAMOBO M1開發板所提供的通用型輸入輸出 (GPIO) 接口,搭配WIFI的無線傳輸介面,即可很容易的製作出一台大、小朋友都喜歡的遙控車;最後,我們再搭配一具商用規格的網路攝影機,使得功能再升級,成為一台能夠“邊走邊看”的遠端監控車。
接下來,我們將製作過程一步一步的詳細為各位作介紹,期望大家都能一起來動動手,打造出一台屬於自己心目中的夢幻車款。
1 材料
1.1 主體

Lamobo M1 一片
1.2 底盤與動力輪組
-

- 底盤

-

- 直流馬達

-

- 萬向輪

-

- 輪胎

1.3 馬達控制器
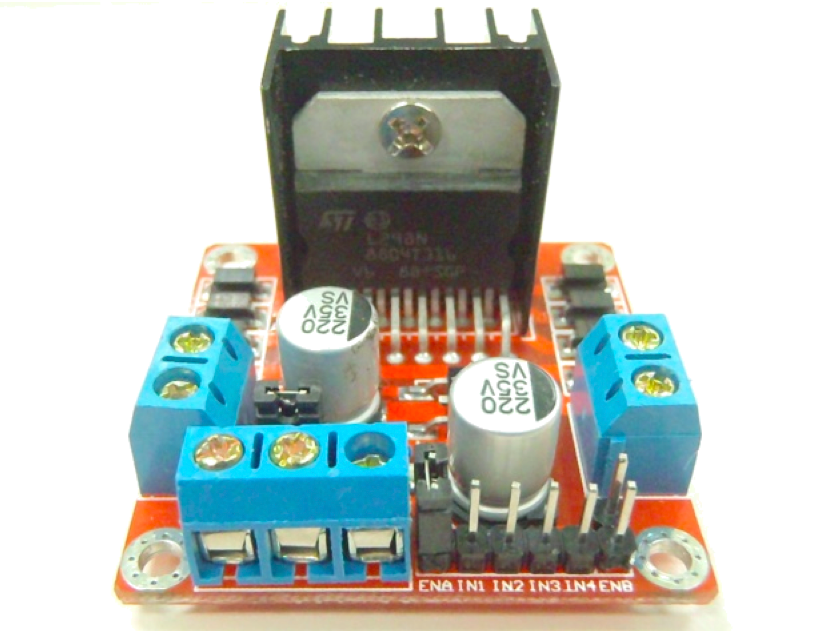
馬達控制器
1.4 線材

四條約8公分長的馬達控制線
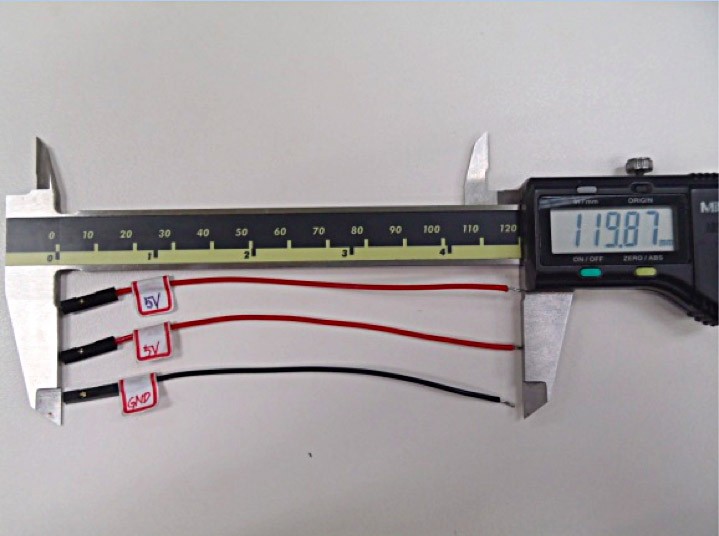
三條約12公分長單端為杜邦頭的電源線(紅x2,黑x1)

六條約9公分長,兩端皆為杜邦頭的訊號控制線(紅x2, 黃x2, 黑x2)
1.5 銅柱與螺絲

三支約48公厘長的銅柱

八顆固定銅柱用的螺絲

一支約15公厘長的銅柱

一支約30公厘長的銅柱
2 組裝步驟
2.1 萬向輪組安裝

萬向輪組螺絲孔位對準底板預留之孔位。
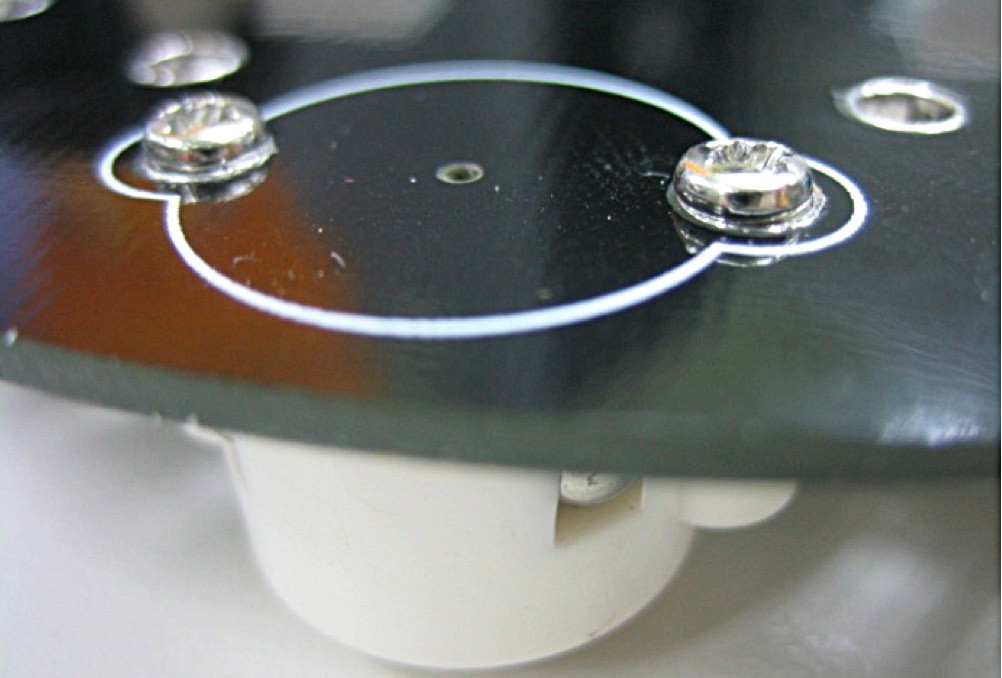
再使用螺絲固定於底盤。

完成圖
2.2 馬達安裝與接線

取出配件包之馬達固定座椅及螺絲。

將螺帽先嵌入固定座預留之螺帽固定孔。

馬達切齊板邊,並將固定座對齊底盤預留支螺絲孔位。

左右兩個孔位用螺絲由底盤下方往上與馬達固定座鎖緊,使馬達確實固定於底盤上。
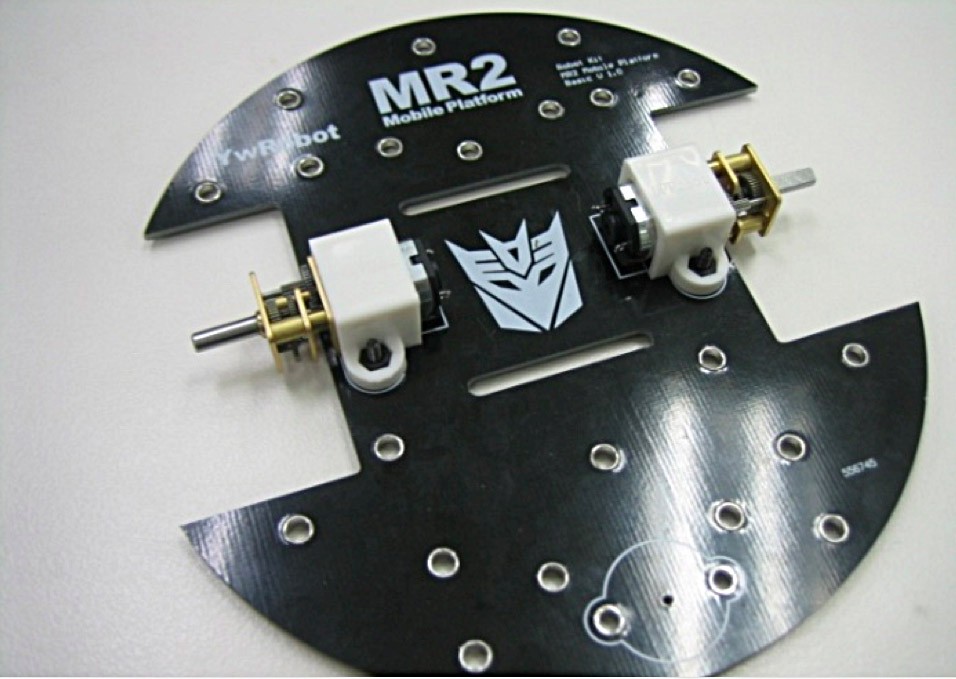
底盤左右兩組馬達固定後之完成圖。
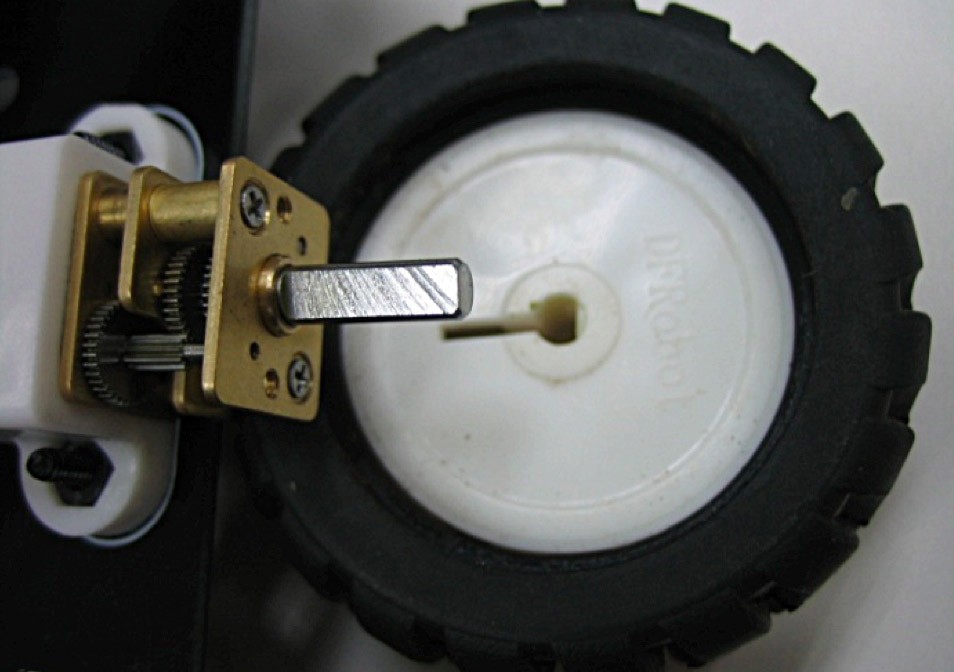
接著將馬達中心軸對準輪胎中心之圓形切角位置,直接插入結合。
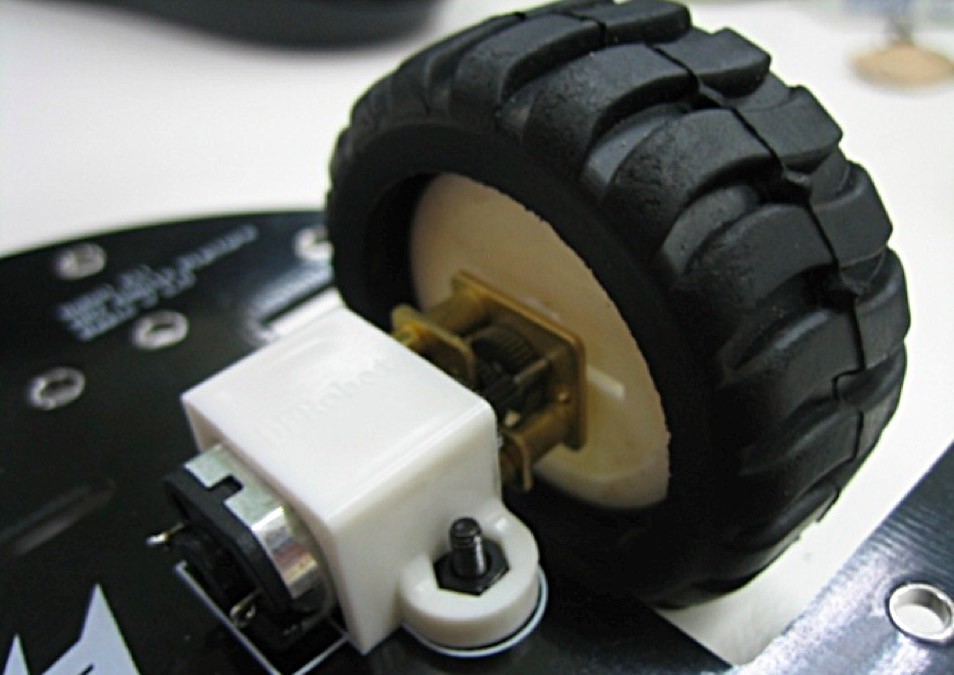
完成結合後之馬達與輪組。

另外一邊的輪組以相同的方式結合,完成所有輪組的安裝。
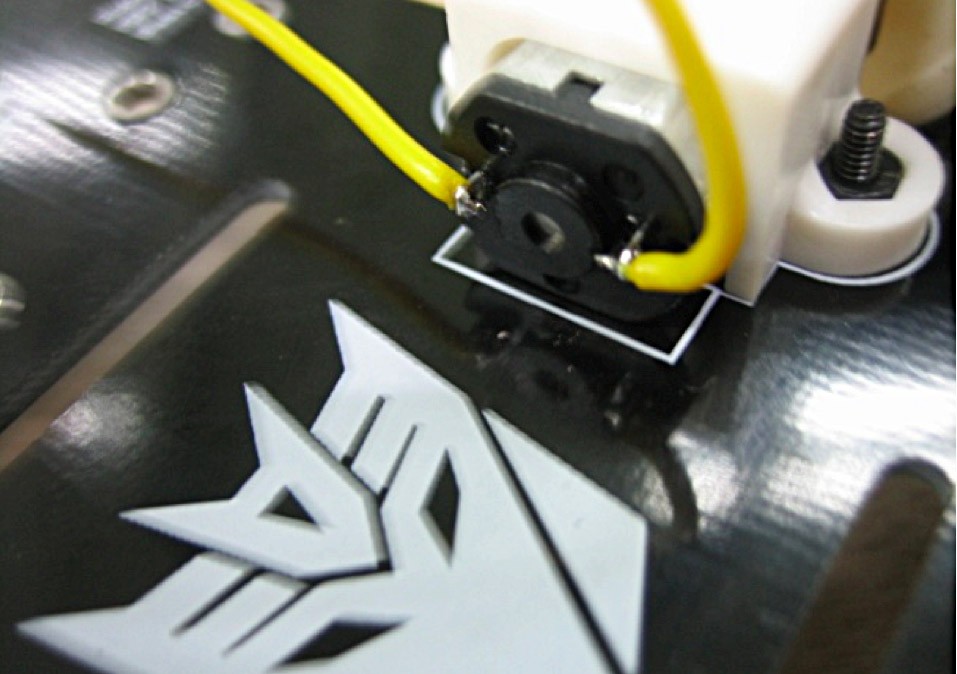
將馬達控制線兩端剝線約5公厘並採用焊接的方式,分別將控制線的一端於馬達上標註有”+”符號之接點作焊接,並以紅線標記於控制線的另一端,以供接線時辨識。

另外一邊的馬達採相同的做法並完成所有接線。
2.3 馬達控制器安裝
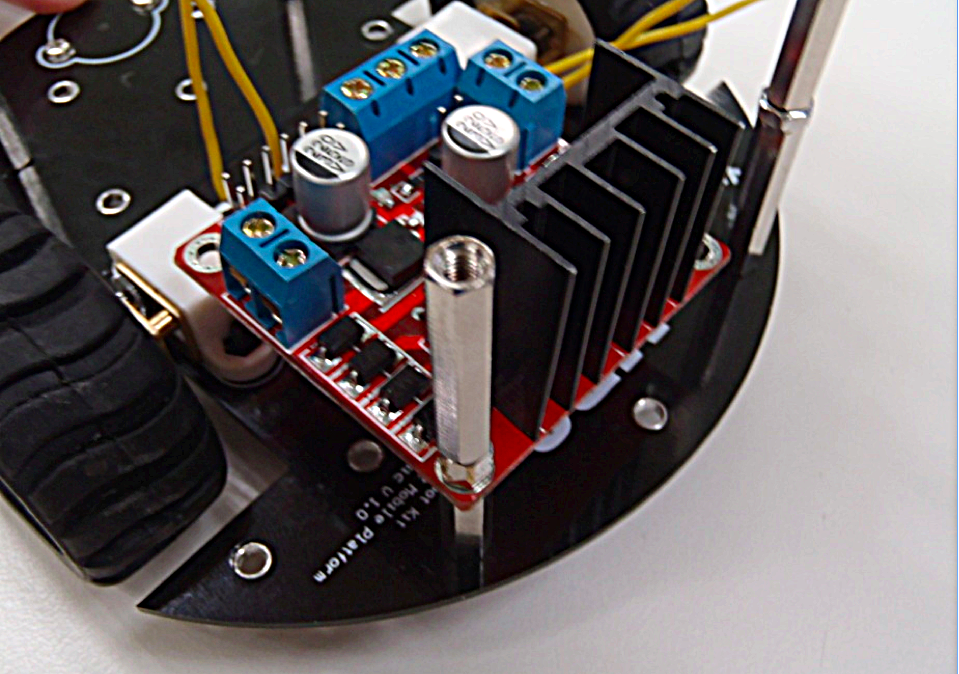
用螺絲將15公厘銅柱固定於底盤後端,然後使用30公厘銅柱將馬達控制器固定於兩銅柱之間,其不會碰觸到左輪馬達;另外再將48公厘長之銅柱固定在右輪後方位置及前方左右兩邊適當之孔位,以利之後固定Lamobo M1。
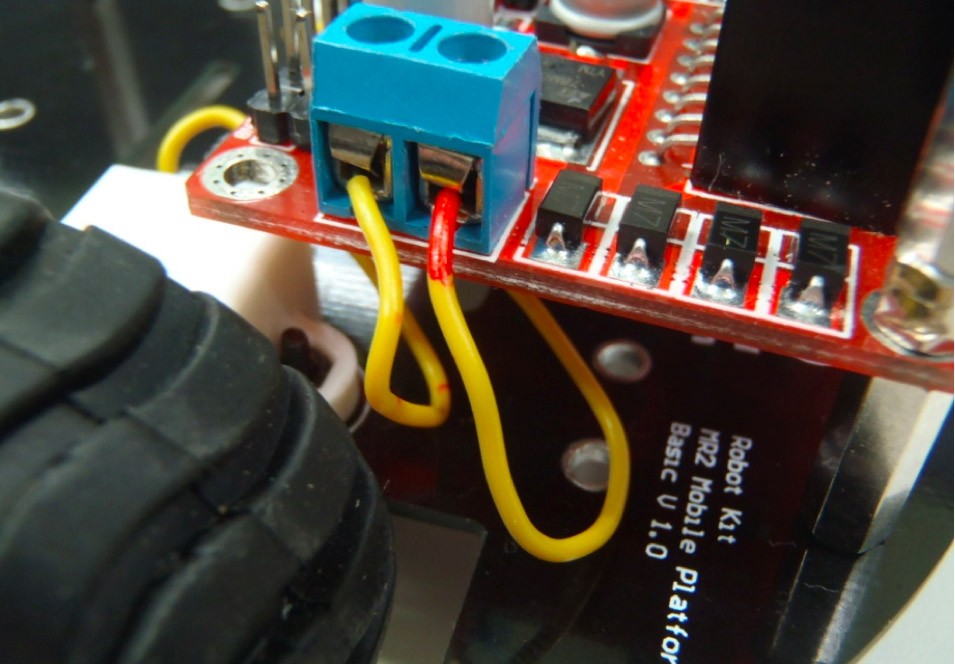
將右側馬達標註為紅色的線頭接入控制器右上的接點;另一條控制線則接入右下方接點。

左側馬達同樣將標註為紅色的線頭接入控制器左上的接點;另一條則接入左下方接點。
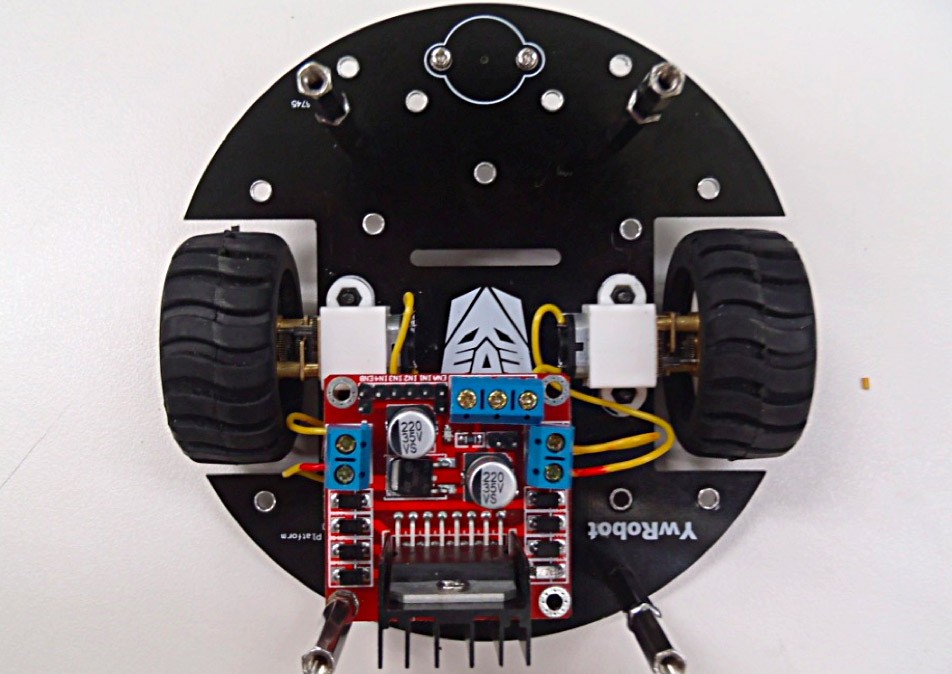
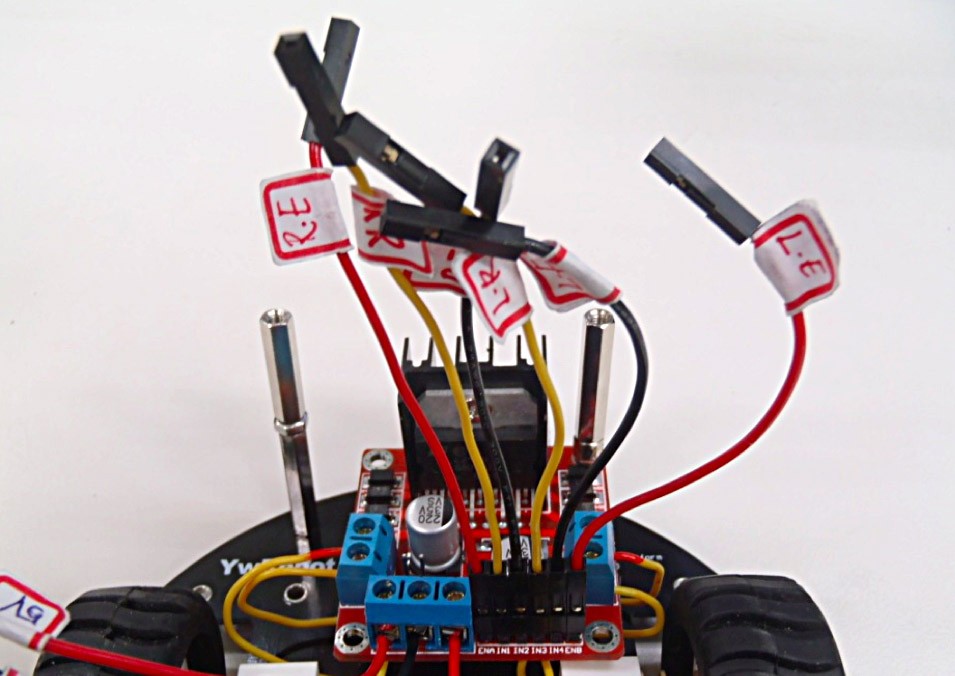
俯視接線狀況
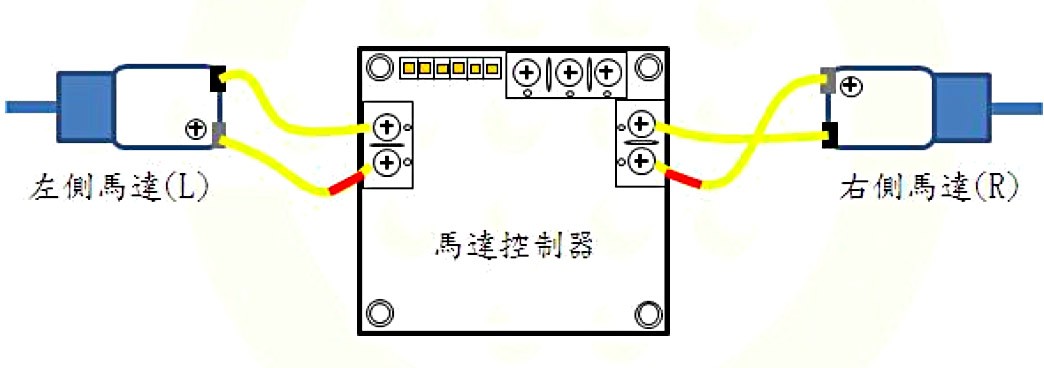
馬達控制線接線示意圖
2.4 馬達控制器電源與訊號控制線裝配

分別將兩條紅色電源線(標註為5V)一端剝線5公厘後,接入馬達控制器前方端子台左右兩個端子,並使用十字起子將所有固定螺絲鎖緊。
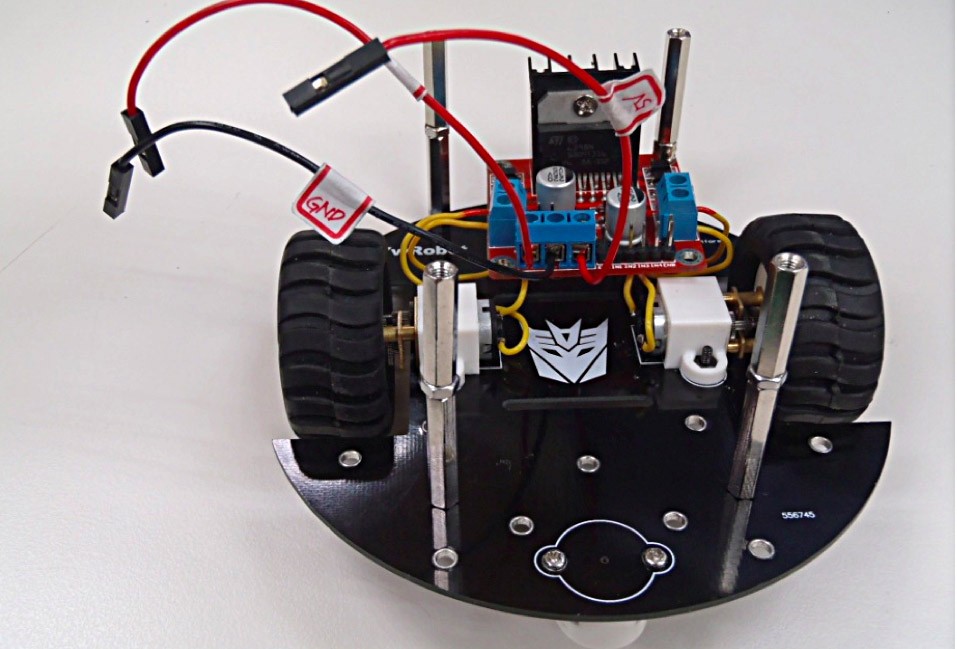
再將黑色地線(標註為GND) 一端剝線5公厘後,接入端子台中間之端子,並使用十字起子將所有固定螺絲鎖緊。
接下來,分別將訊號控制線從左至右依紅、黃、黑(劃分為右輪控制)、黃、黑、紅(劃分為左輪控制),個別確實插入馬達控制器前方6針的腳座,即完成所有控制器端的配線。
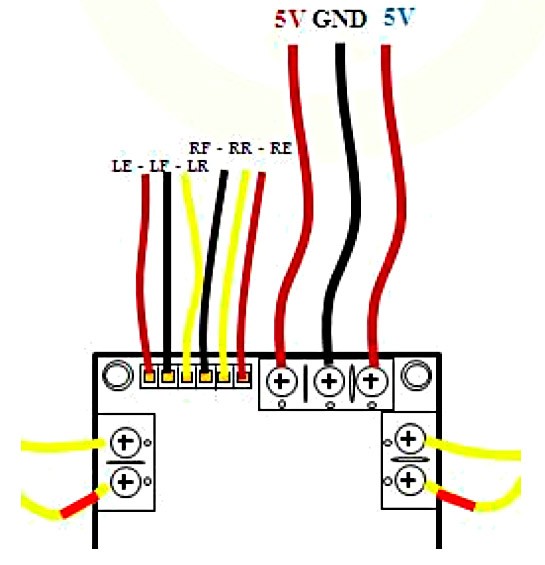
馬達控制器配線示意圖
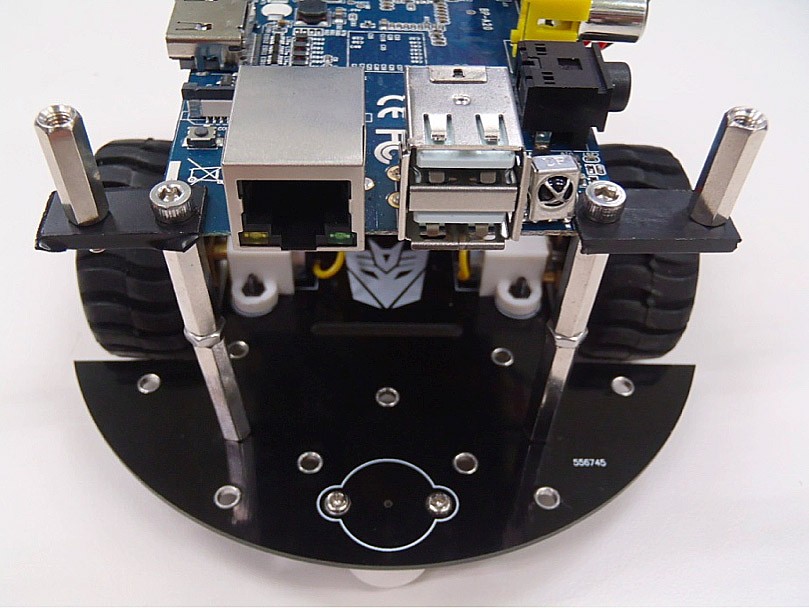
2.5 Lamobo M1安裝與配線
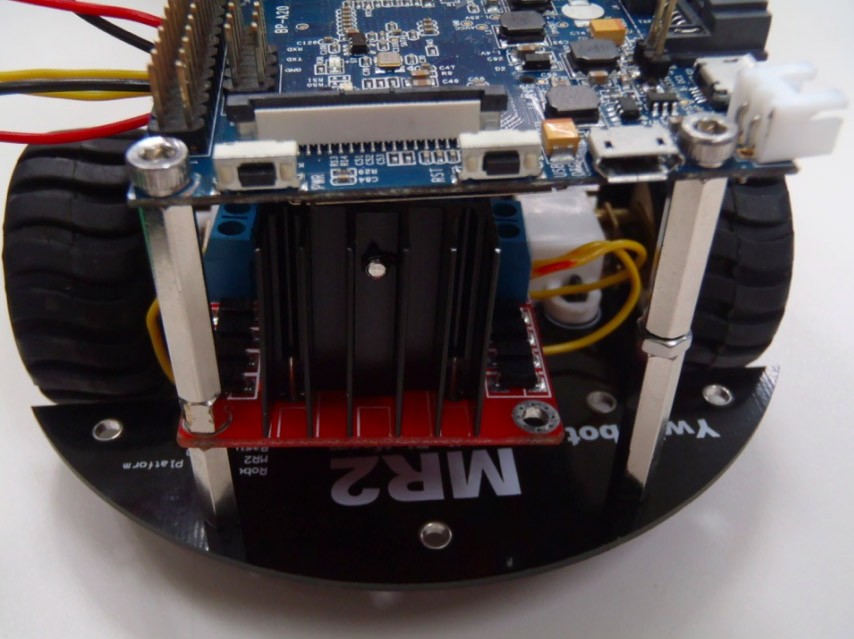
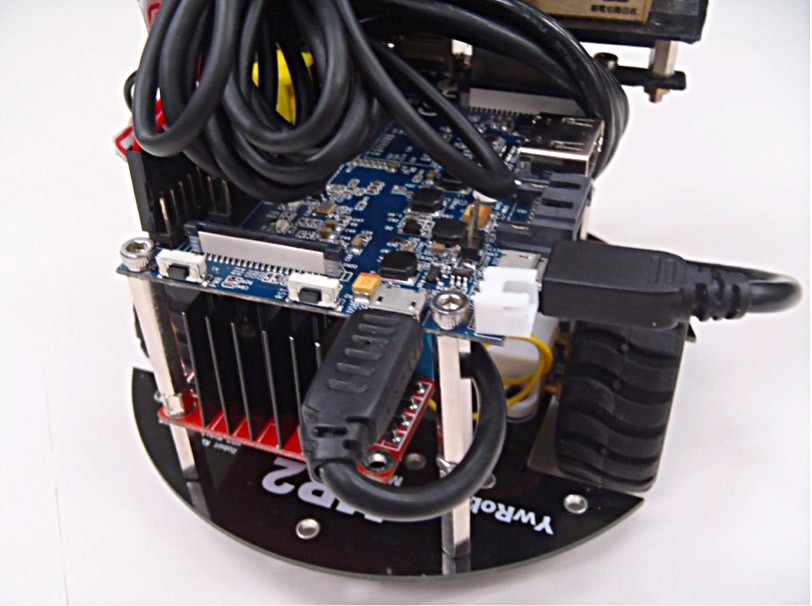
利用銅柱與螺絲將Lamobo M1支撐並固定於控制器上方,並引出電源及控制線之所有接頭。
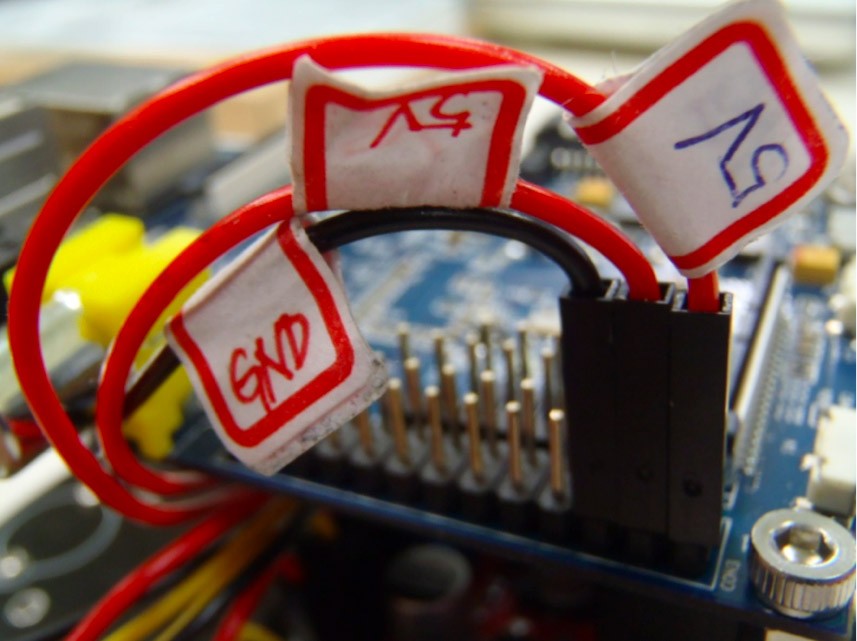
如圖示,將兩條標示為5V的兩條紅色電源線個別與CON3第2腳與第4腳連接(兩個腳位之特性想同,所以接腳可相互對調),而標示為GND的黑色線則接入第6腳。
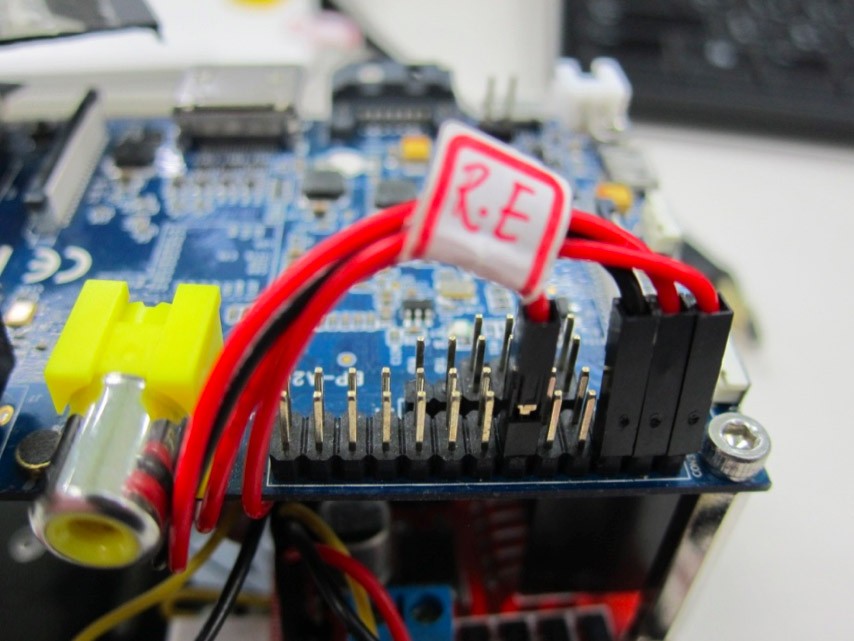
接下來將標註為R.E的紅色線接入CON3的第12腳。
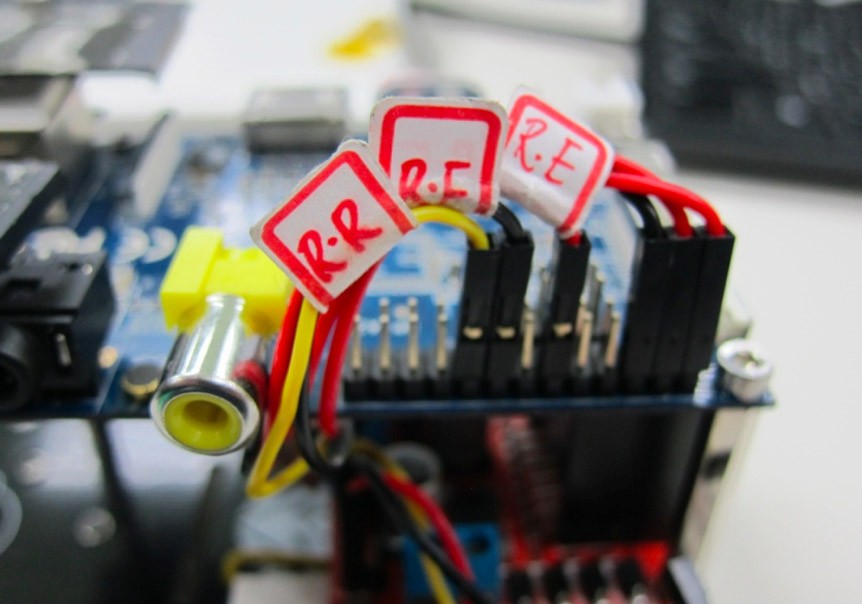
下一步,將標註為R.F的黑色線接入CON3的第16腳、標註為R.R的黃色線接入CON3的第18腳位。
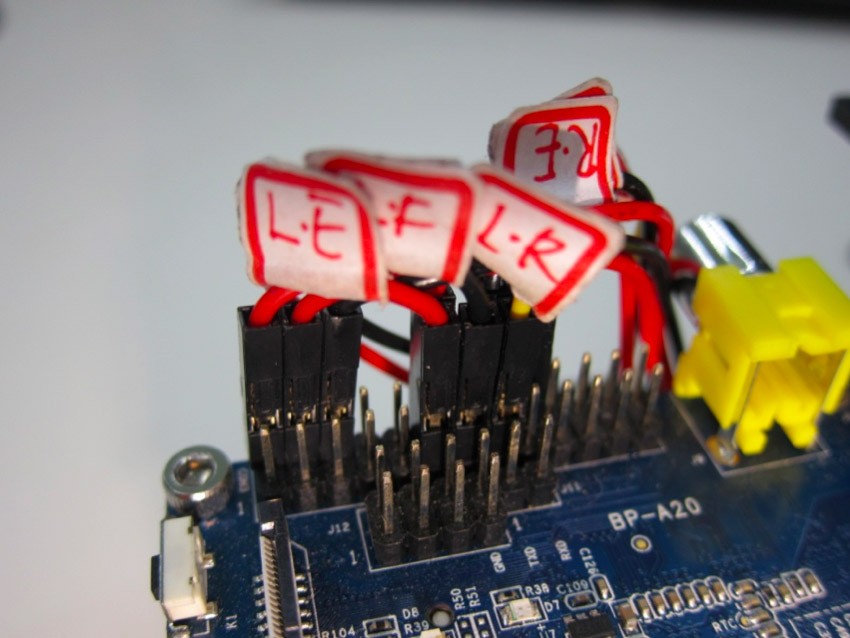
最後將標註為L.E的紅色線接入CON3的第11腳、L.F黑色線接入第13腳、L.R黃色線接入第15腳位,完成所有Lamobo M1端的接線。
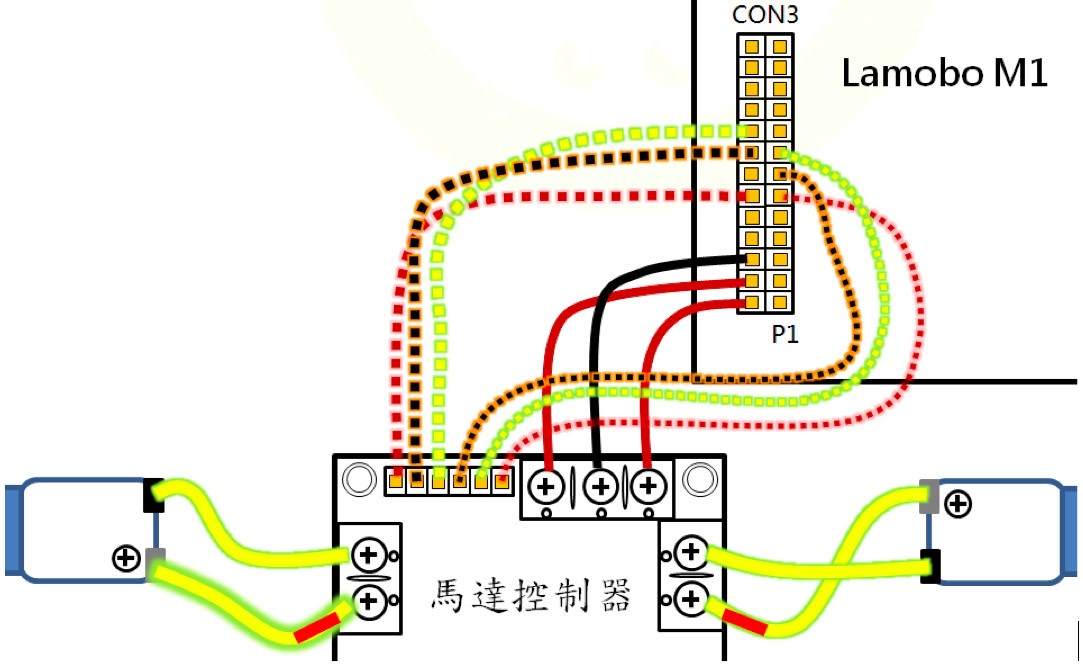
馬達控制器至Lamobo M1之接線示意圖
利用銅柱以及壓克力板在車頭架設一個行動電源的放置平台。

行動電源放置平台架設完成,在平台上黏上雙面膠,以避免車子在行進間,因為晃動造成行動電源掉落。

阿楞頭行動電源掛載完成。

插入USB WIFI裝置。
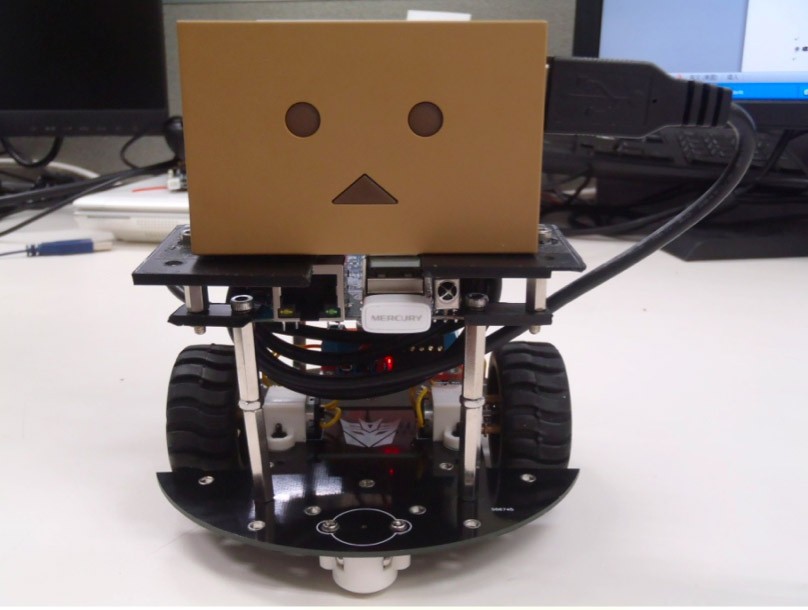
將行動電源之輸出接入Lamobo M1的電源輸入端口(DC-IN),完成所有接線。
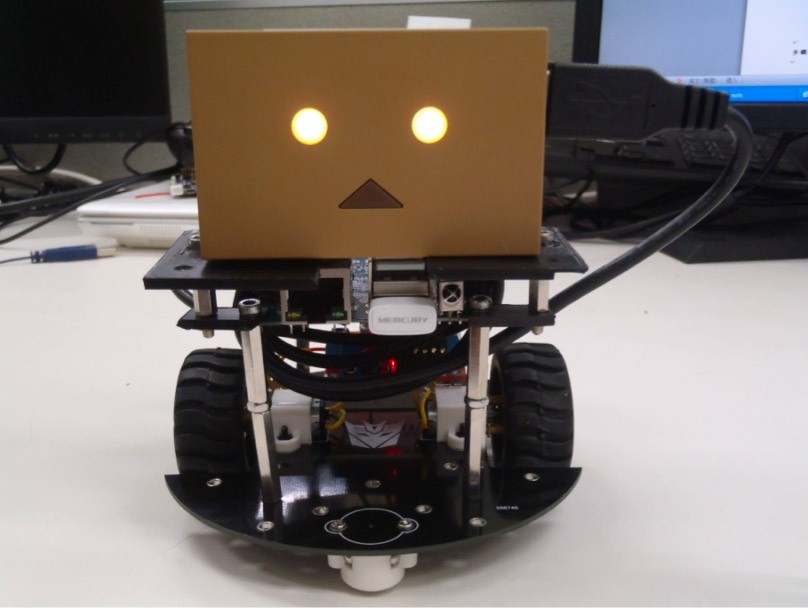
啟動電源成功。
由左上方俯視。

由後方俯視。
2.6 網路攝影機安裝與配線

選用Microsoft的網路攝影機Cinema型號為1393。

該攝影機規格如所圖示。
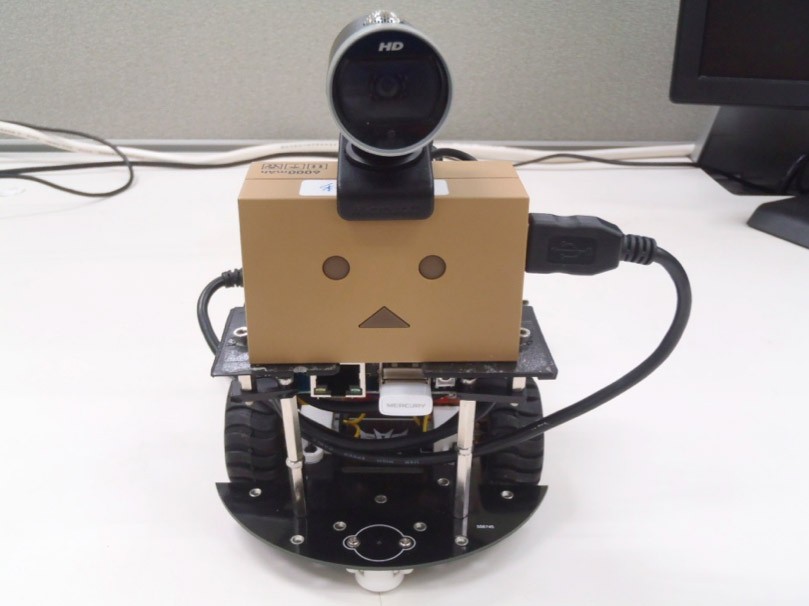
利用攝影機底座夾具將攝影機固定於阿楞頭行動電源上。

利用攝影機底座夾具將攝影機固定於阿楞頭行動電源上。
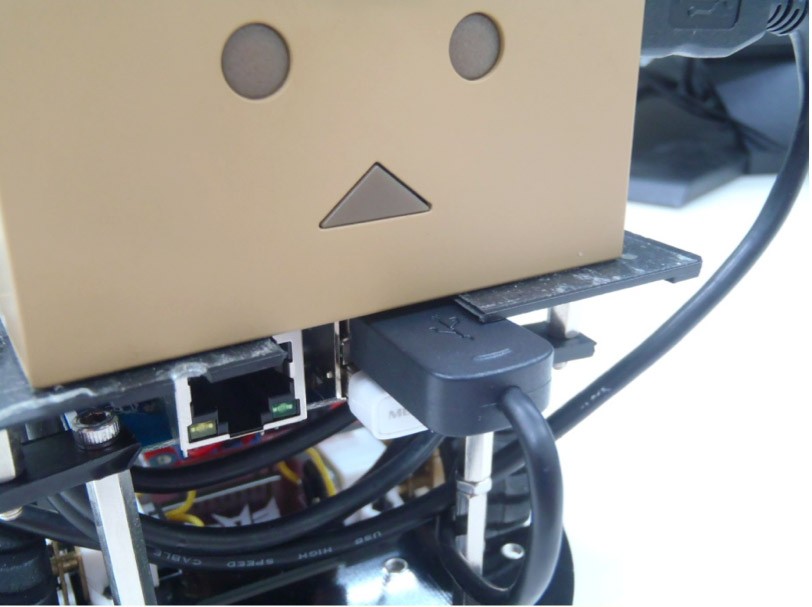
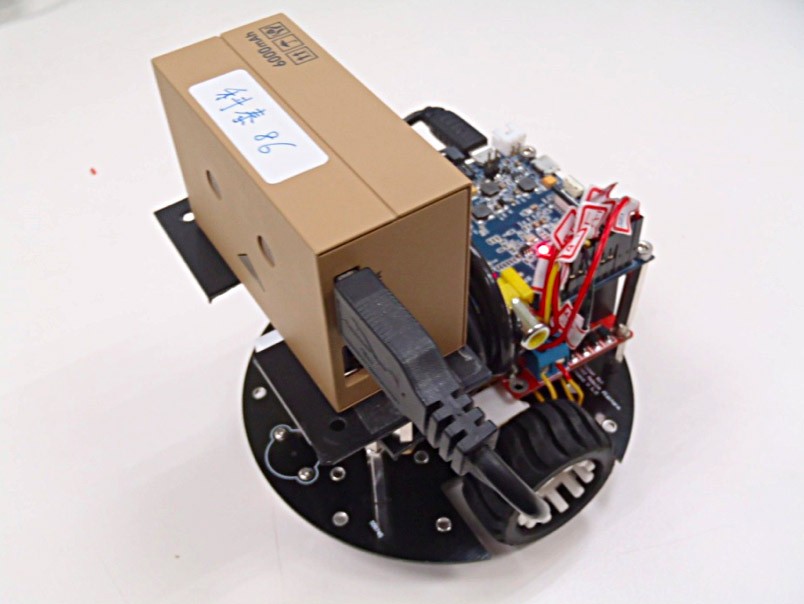
將攝影機的USB接頭插入Lamobo M1的USB座中,另一個USB埠為WIFI裝置所佔用。

考量攝影機所可能導致的系統不穩定,所以我們額外再堤供Lamobo M1更多的電力;如圖所示,我們利用USB線接出阿楞頭行動電源1A的電力。
將行動電源所提供的1A輸出,連接至Lamobo M1的OTG連接埠。
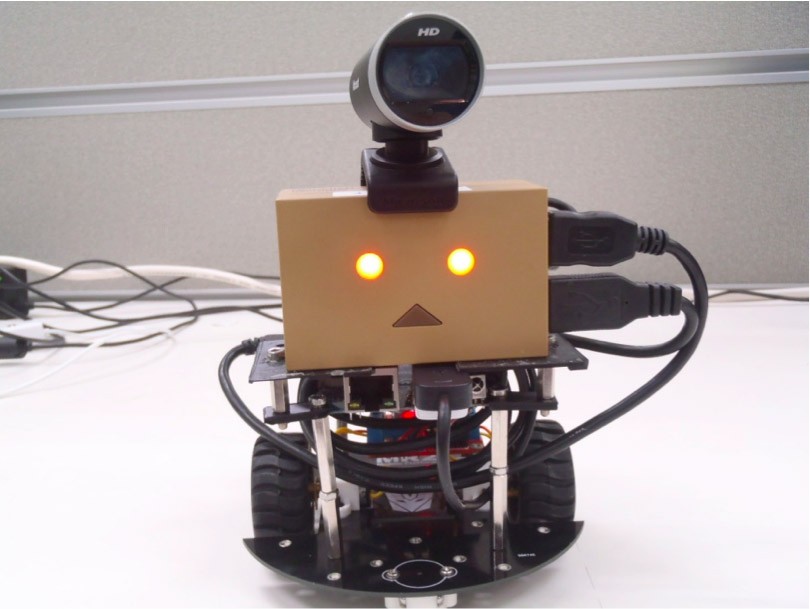
啟動完成!
零件採購資訊
3.2 底盤與輪組:最新改良版 Arduino Mini Robot Chassis B機器人底盤(微控科技)
3.3 馬達驅動器:L298N DC馬達驅器模組 Arduino/ 51/ AVR/ AVR/ ARM(微控科技)
3.4 工具、線材、螺絲(源達科技)
3.5 Microsoft 網路攝影機(台灣微軟)
相關網路資源
M1使用說明書下載
M1 Image(Android) 下載
遠端監控車主板(M1)Source Code下載 百度雲
遠端監控車APK下載
遠端監控車APK Source Code下載 百度雲

- 【Podcast】AI 機器人安全革命:從功能安全到軟體定義安全 - 2026/04/10
- RISC-V技術成熟度與全球AI落地應用現況剖析 - 2026/04/10
- 宇樹、智元出貨囊括八成 預估2026年中國人形機器人產量年增94% - 2026/04/09
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!



2017/05/15
這租ˇˇ組套件多少錢
2017/05/08
可以用電腦鍵盤遙控車子嗎
2016/11/09
請問能夠達到影像傳輸
這樣有關影像部分的花費大約多少?
2015/11/12
請問 版主~ 有 WIFI發射 訊息端的 指南嘛! 感恩感恩!
2015/05/05
好需要這編文章. 好感動.
感謝版主的用心.