作者:賴桑
目前市面上已經有很多的開發平台,可是面對琳瑯滿目的選擇,使用者常常不知所以然,這次我介紹的是Realtek推出的Arduino Compatible開發硬體平台Ameba,我利用了Ameba牛刀小試,製作了一個可以連接居家空氣品質、居家光照以及盆栽水位的感測值讀取裝置,當作開箱文。

家庭智慧植物園監控器
材料清單
點以下連結可以看到各個感測器、模組的詳細說明:
1. Grove – Air Quality Sensor
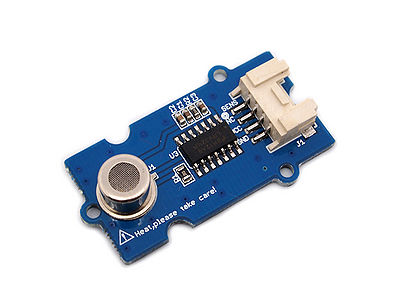
Grove – Air Quality Sensor
- Grove – Light Sensor
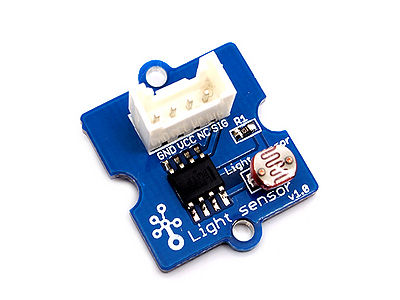
Grove – Light Sensor

水位感測模組
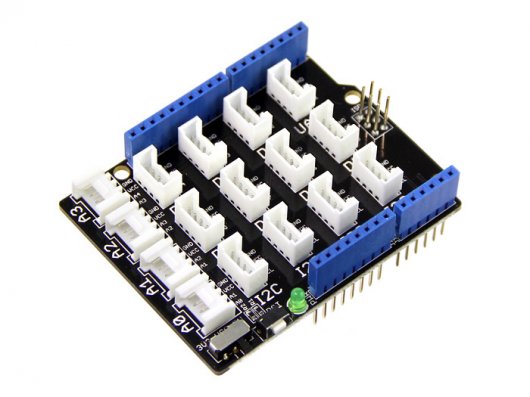
Grove – Base Shield
Ameba系統與接腳描述

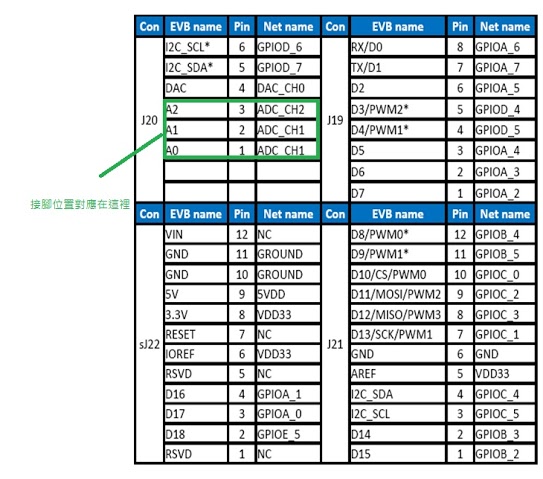
接腳對應位置
以下是本文各裝置的實際對應接腳:
- A0 : Grove – Air Quality Sensor
- A1 : Grove – Light Sensor
- A2 : 水位感測模組
原始程式碼:
int i ;
long vol_standard;
int init_voltage;
int first_vol;
int last_vol;
int temp;
int counter;
boolean timer_index;
boolean error;
int current_quality =-1;
void setup()
{
Serial.begin(9600);
Serial.println("sys_starting...");
delay(20000);
init_voltage=analogRead(0);
Serial.println("The init voltage is ...");
Serial.println(init_voltage);
while(init_voltage)
{
if(init_voltage<798 && init_voltage>10)// the init voltage is ok
{
first_vol=analogRead(0);//initialize first value
last_vol=first_vol;
vol_standard=last_vol;
Serial.println("Sensor ready.");
error=false;;
break;
}
else if(init_voltage>798||init_voltage<=10)
{
i++;
delay(60000);//60000
Serial.println("waitting sensor init..");
init_voltage=analogRead(0);
if(i==5)
{
i=0;
error=true;
Serial.println("Sensor Error!");
}
}
else
break;
}
}
void avgVoltage()
{
if(i==150)//sum 5 minutes
{
vol_standard=temp/150;
temp=0;
Serial.print("Vol_standard in 5 minutes:");
Serial.println(vol_standard);
i=0;
}
else
{
temp+=first_vol;
i++;
}
}
int slope(void)
{
while(timer_index)
{
if(first_vol-last_vol>400||first_vol>700)
{
Serial.println("High pollution! Force signal active.");
timer_index=0;
avgVoltage();
return 0;
}
else if((first_vol-last_vol>400&&first_vol<700)||first_vol-vol_standard>150)
{
Serial.print("sensor_value:");
Serial.print(first_vol);
Serial.println("\t High pollution!");
timer_index=0;
avgVoltage();
return 1;
}
else if((first_vol-last_vol>200&&first_vol<700)||first_vol-vol_standard>50)
{
//Serial.println(first_vol-last_vol);
Serial.print("sensor_value:");
Serial.print(first_vol);
Serial.println("\t Low pollution!");
timer_index=0;
avgVoltage();
return 2;
}
else
{
avgVoltage();
Serial.print("sensor_value:");
Serial.print(first_vol);
Serial.println("\t Air fresh");
timer_index=0;
return 3;
}
}
return -1;
}
void loop()
{
current_quality= slope();
if (current_quality >= 0)// if a valid data returned.
{
if (current_quality==0)
Serial.println("High pollution! Force signal active");
else if (current_quality==1)
Serial.println("High pollution!");
else if (current_quality==2)
Serial.println("Low pollution!");
else if (current_quality ==3)
Serial.println("Fresh air");
Serial.print("Photo-resistor: ");
Serial.println(analogRead(1));
Serial.print("Water level: ");
Serial.println(analogRead(2));
}
delay(10); //Adjust here to make the time interval gets close to
//2 seconds
virtualTimer();
}
void virtualTimer() //Intel didn't support Timer2 ISR
{
if(counter==122)//set 2 seconds as a detected duty
{
last_vol=first_vol;
first_vol=analogRead(0);
counter=0;
timer_index=1;
}
else
{
counter++;
}
}
基本原理解說
系統大約需要兩分鐘啟動,使得Grove – Air Quality Sensor能夠取樣進入穩定狀態,接著每次程式會以大約兩秒為間隔,求取A0、A1、A2的讀值,然後回報;這三個感測器A0、A2都是與感測目標成正比關係,也就是說汙染程度越高,A0會得到越高的讀值,水位越高A2的讀值也相對升高;只有A1,會因為遮蔽產生光照不足而讀值越低。
整個系統架構及實作過程可參考以下影片:
結語
Ameba的設計就是一個強過Arduino Due的Arduino!執行效能非常高,因為本身就是ARM Cortex系列的CPU為基礎開發的,此外還外帶了內建的WiFi、NFC reader,在很多Arduino應用的場合,根據價格、性能兩項來比較,確實有其優勢。

社群稱號為「賴桑」的他,以電子電機的背景,熱衷於OSHW的應用開發與實作。取得台北科技大學電子所博士學位,目前主推「農林漁牧大業」計畫的迷你型魚菜共生系統開發。
Latest posts by 賴建宏 (see all)
- 【開箱評測】用Mbed上手開發DSI 2599開發板 - 2020/08/03
- 【OpenVINO™教學】自製麵包影像辨識POS機的應用 - 2019/12/24
- 【邊緣運算】OpenVINO好夥伴 — athena A1 Kit x86單板 - 2019/11/18
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!

