想像一下,你正在教一個孩子如何做一個複雜的任務,比如烤蛋糕。如果這個孩子只能聽懂「現在把麵粉倒進去」這樣單一的指令,他很容易在下一個步驟「攪拌」時忘記或弄錯力度。
傳統的機器人學習就像這個「一步一腳印」的孩子,它們只看得到當下,做一步猜一步,很容易在長長的任務序列中犯錯。
而 ACT (Action Chunking with Transformers),正是那個能讓機器人擁有「預見能力」和「全局視野」,從而順利完成複雜任務的「秘密武器」。它不僅是技術上的突破,更是引領人形機器人走出實驗室、走進我們生活的最關鍵一步。
為什麼傳統機器人「短視」又「笨拙」?
在深入 ACT 的魔法之前,我們先來看看人形機器人面臨的兩大困境:
1. 高難度連環任務的挑戰
人形機器人有數十個關節要控制。讓它「泡一杯咖啡」這個看似簡單的動作,其實是成百上千個連續且精確的小動作組成的長鏈條:走向檯面–>拿起杯子 –> 裝咖啡粉 –> 按下開關…
傳統的模仿學習(Behavioral Cloning, BC),就像看食譜一樣,每一次只學會一個動作,問題是:
-
問題一:短視症 (Myopia)。 機器人只關心當下,缺乏對「為什麼做這個動作」的長遠意圖。
-
問題二:蝴蝶效應 (Error Accumulation)。 如果機器人第一次拿起杯子時稍微偏了一點(微小誤差),這個錯誤狀態就會像雪球一樣越滾越大,導致後面所有的動作都偏離軌道,最終可能把咖啡灑得一團糟。
2. 數據太「碎片化」
教導機器人是極度耗時耗力的。我們需要一種方法,讓機器人能夠高效地從人類的示範數據中學習。如果每次訓練都要幾個月,通用機器人的夢想將遙遙無期。
ACT 的目標:既要學得快,又要行動穩,還得有遠見!
ACT 的核心魔法:Transformer 與「預知行動包」
ACT (Action Chunking with Transformers) 的名字聽起來很學術,但它的核心理念卻非常直觀且強大。它採用了兩大核心技術:

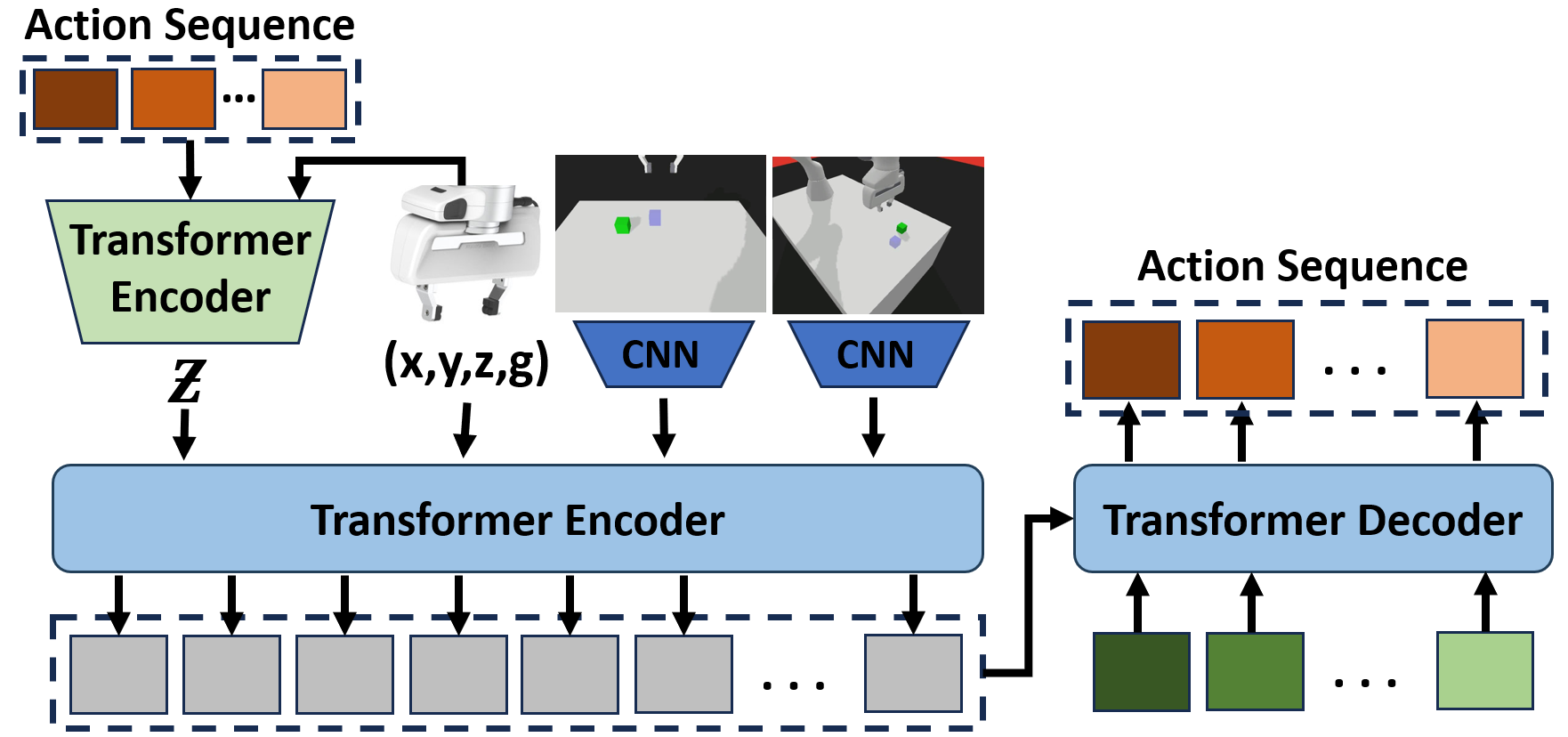
ACT技術原理示意圖(source)
1. 動作分塊:讓機器人看見未來多步後的動作(Action Chunking)
ACT 不再只預測單一的下一步動作,它一次會打包預測一整串未來多個動作的序列,我們稱之為一個「預知行動包」,好處是:
-
全局視野: 當機器人執行當前動作時,它腦中已經有了未來多步的「劇本」。這讓它的動作不再是隨機的點擊,而是有目的、有連貫性的流程。
-
絲滑流暢: 預測一個序列,就像給機器人規劃了一條短程的「微型路線圖」,動作之間的銜接自然平滑,告別了過去那種僵硬、一頓一卡的老式機器人風格。
-
容錯能力: 由於它預測的是一個行動包,即使機器人在某一步稍微偏離了一點點,模型也能根據整個行動包的整體目標,在下一步或下兩步時快速將其拉回正軌。
2. Transformer:賦予機器人序列理解力
要預測一個連貫且複雜的行動包,需要一個極其聰明的大腦。ACT 借用了在 ChatGPT 等大型語言模型中取得巨大成功的架構——Transformer。
Transformer 最厲害的就是它的「自注意力機制」:
-
理解上下文: 就像人類閱讀句子一樣,Transformer 能讓模型在生成動作序列時,理解每一個動作與整個當前狀態以及序列中所有先前動作的關係。
-
處理高維感官: 機器人從攝影機和感測器中獲得的數據是龐大且雜亂的(例如,畫面裡有桌子、杯子、手)。Transformer 能像一個聰明的篩選器,只提取出與「拿起杯子」這個任務相關的關鍵資訊。
此外,ACT 還使用了一個巧妙的設計——CVAE(條件變分自編碼器)來處理多樣性。如果一個狀態下,「開門」既可以推也可以拉,ACT 允許模型在執行時隨機選擇一種合理的模式,讓機器人的行為更像真人、更有彈性。
3. 不斷修正的「預測者」
ACT 採用的執行模式叫做「再規劃 (Receding-Horizon Re-Planning)」。這就像一個超級嚴格的司機:
-
預測: 司機(模型)預測未來 10 秒(n步)的路線。
-
執行: 司機只執行預測中的第一個動作。
-
修正: 執行完第一個動作後,司機立刻重新看路(感知新狀態),並重新預測未來 10 秒的路線。
這種不斷修正、不斷更新預測的機制,讓機器人始終能夠根據環境的最新變化來調整動作,極大地提高了在真實世界中的穩健性(Robustness)。
劃時代意義:邁向通用機器人
ACT 不僅是讓機器人動作更漂亮,它正在改變整個機器人學習的範式:
1. 通用智慧的基石
ACT 的架構是「任務無關」的。想像一下,我們將數百萬個不同任務的數據(從切菜到開門)輸入給一個大型 ACT 模型訓練。這個模型將學會一個通用的、跨任務的技能集。
-
技能遷移: 機器人學會「開冰箱」的抓取技巧,就能輕鬆應用到「拿起桌上鉛筆」上。這大大減少了針對單一任務的繁瑣編程和訓練。

走向家庭的機器人助手(source)
2. 人類教師的時代來臨
過去,教機器人需要寫複雜的數學方程式和控制代碼。現在,有了 ACT 這樣高效的模仿學習框架,機器人可以直接從人類操作的錄影或示範數據中學習高階技能。
-
這意味著,任何人都可以成為機器人的「教師」,大幅降低了機器人技術的門檻,讓知識累積的速度呈指數級增長。
ACT 與 LeRobot 的強強聯手
一個再好的演算法,如果鎖在實驗室裡,也無法改變世界。ACT 之所以能迅速普及,得益於它與開源專案 LeRobot 的緊密合作,強強聯手的優勢如下:
1. LeRobot:具身 AI 界的「GitHub + Model Hub」
LeRobot 是由 Hugging Face 發起的一個專案,目標是為機器人學習打造一個開放、共享的生態系統。就像軟體開發者共享程式碼,AI 研究員共享模型一樣,LeRobot 讓機器人研究員可以:
-
標準化數據: 確保不同實驗室收集的數據能夠互相理解和使用。
-
共享模型: 一鍵下載別人已經訓練好的、基於 ACT 的強大策略模型。
》延伸閱讀:為何Google、NVIDIA和Intel都支持LeRobot開源專案?
2. ACT:LeRobot 模型庫的「明星產品」
在 LeRobot 的生態中,ACT 及其衍生模型(如 Diffusion Policy)是最重要和最主流的架構之一。
-
普及加速器: LeRobot 提供了 ACT 的「傻瓜式」實作代碼。這意味著大學生、小型研究團隊或業餘愛好者,都可以輕鬆下載代碼、載入標準化數據集,在幾小時內啟動一個高性能的 ACT 模型訓練。
-
數據與模型的協同: LeRobot 確保了數據載入器 (DataLoader) 與 ACT 模型能夠無縫對接。它解決了過去機器人領域中「數據難以重用」和「程式碼難以復現」的兩大難題。
簡單來說,ACT 是讓機器人聰明的「大腦軟體」,而 LeRobot 則提供了快速、廉價、開放的「工廠」和「分發平臺」,讓這個大腦能夠被大規模製造和使用。
總結
ACT (Action Chunking with Transformers) 改變了機器人的決策方式。它讓機器人從一個只能看到當前的「短視者」,變成了能夠預見未來行動、動作連貫、且極具穩健性的「短程規劃大師」。
結合 LeRobot 帶來的開源力量,我們不再需要幾十年的時間去編程每一個動作。現在,透過 ACT,我們正在教導機器人如何學習,如何像人類一樣思考和行動,進而加速一個由通用、智能、且行動流暢的機器人所構成的未來。
(責任編輯:歐敏銓)

- 從AI PC到邊緣終端 Intel以最新Core Ultra系列擴大混合運算版圖 - 2026/03/30
- NVIDIA與全球機器人生態系推動具生產規模的實體AI - 2026/03/27
- 從VLA到落地部署:拆解新世代機器人開發關鍵路徑 - 2026/03/24
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!