作者:歐敏銓

「要訓練一個能看懂垃圾的 AI,有時必須先造出一個完美的『假垃圾世界』。」
當 AI 模型學會分辨「可樂瓶」和「可樂罐」,那是因為它見過足夠多樣的影像樣本;然而,當任務轉為辨識廢棄物、分類可回收物時,事情就變得棘手許多。
真實世界的垃圾千變萬化,形狀扭曲、表面破損、灰塵覆蓋,標註困難又昂貴。這時,一種新思維讓人眼睛一亮:用AI 生成「合成廢棄物資料」(Synthetic Waste Data),讓 AI 模型能在虛擬世界中學會看懂真實世界的垃圾樣貌。
一切從乾淨的 3D 模型開始
將這個思維化為行動的,是一家來自台南的永續科技新創 – Aireco(宜科循環) ,該公司導入先進的AI技術開發創新的回收系統,以電腦視覺取代人眼辨識,再以機器手臂替代人力執行刪選分類,透過數據分析與軟硬體整合,能有效提升回收效率與準確度。
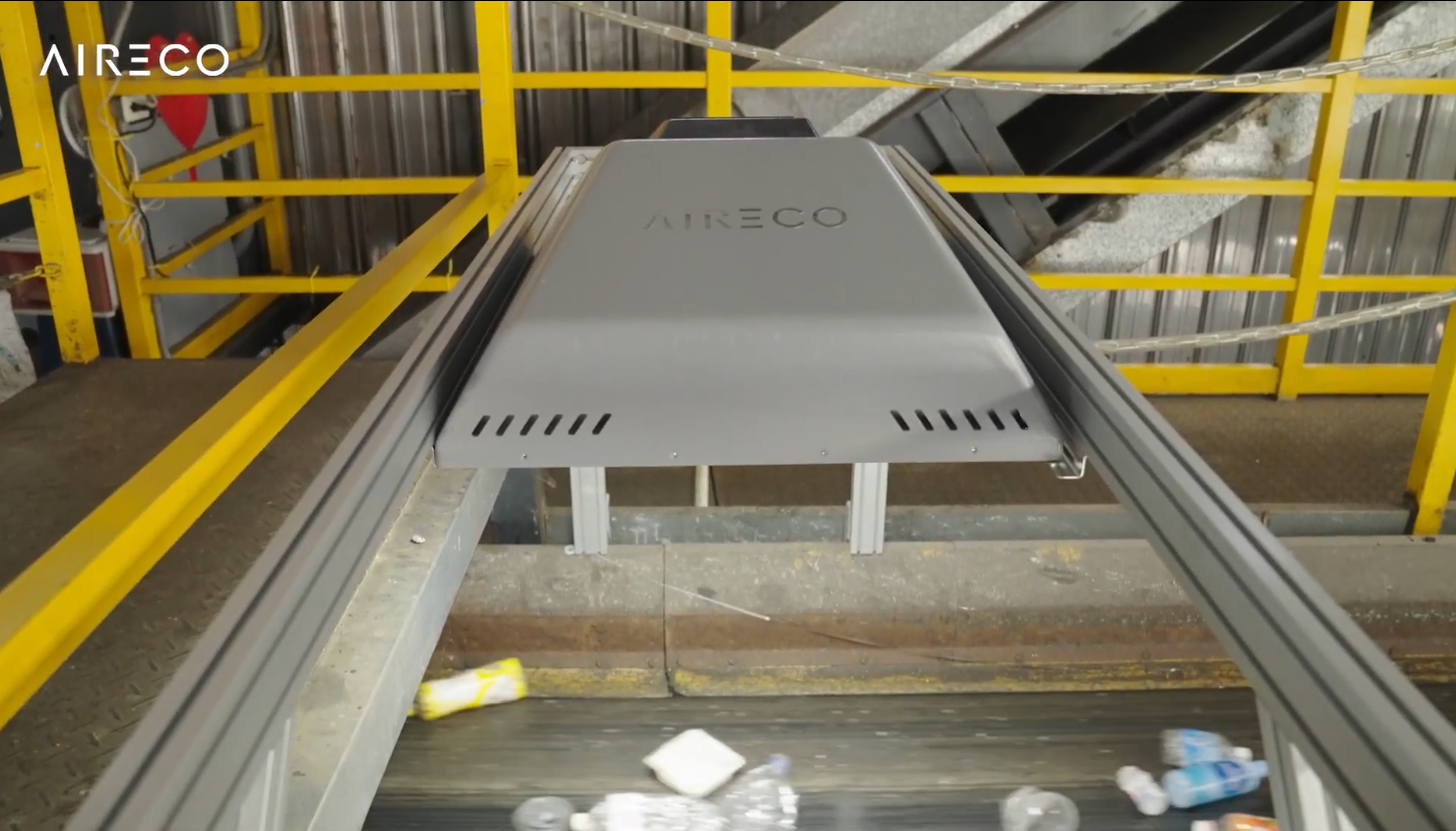
為訓練高效能的 AI 模型,Aireco 使用 NVIDIA Omniverse 平台訓練 AI 模型,首先需要設計一個產品的 3D 模型──例如塑膠瓶、電風扇、手機外殼──的精緻 3D 模型。這些模型可能來自 CAD 設計圖、3D 掃描或線上素材庫。
它們外觀完整、材質清晰、光滑如新,但接下來要將它們「變形」。這步驟需載入 NVIDIA Isaac Sim 模擬真實訓練環境,運用物理效果方式,讓這些 3D 物件掉落到有紋理的背景上面,接著使用 NVIDIA Replicator 擴展模組來生成場景的影像和標註,將這些固定數量的 3D 模型,生成各種不同的廢棄物圖片來訓練 AI模型 ,進一步有效辨識廢棄物的類別和處理方式。
這過程就像是讓「產品」提前走到它的終點,「從工廠新品,變成垃圾堆裡的一員。」
廢棄場景的誕生
生成「廢棄物」的過程,既是藝術也是工程。團隊為每個 3D 模型設計一連串變化:裂痕、刮傷、變形、鏽蝕、髒污、水漬、貼紙剝落……所有這些細節都能在 Omniverse 中透過材質層疊 (MDL materials)、貼花 (decals) 或 置換貼圖 (displacement mapping) 加入。進一步還可使用物理破碎模擬 ── 例如讓玻璃瓶真實地破裂成數片,或讓金屬外殼在撞擊後微微凹陷。每個破損版本都成為 AI模型的「訓練教材」之一。
Omniverse 的物理引擎 (PhysX) 讓這些變化不只是視覺效果,而是具有現實邏輯:碎片會掉落在地、物體堆疊時彼此碰撞、灰塵按重力沉積。這種真實感是過去僅靠靜態圖像無法達成的。
不僅如此,Omniverse還讓研究團隊可以為生成場景設定背景:可能是一個潮濕的回收場、一個城市角落、一個鋼鐵工廠的角落。他們在場景中隨機放置物體──塑膠瓶、紙箱、金屬罐、電子板、破布──並透過重力模擬,讓它們自然地「亂堆」。光照也會隨機切換:有時陽光刺眼、有時陰影濃重、有時夜間泛著工地燈的橘光。
這樣的隨機性(Domain Randomization)是合成資料生成的核心。每一張渲染出的影像,都是環境條件、角度、光源、物體位置的獨特組合。從有限的十幾個模型,就能生成上萬種「看似真實」的畫面。
合成資料的祕密:自動標註
傳統影像資料最大的瓶頸,是標註成本。要讓 AI 學會辨識「瓶子在哪裡」、「哪個是塑膠、哪個是金屬」,得靠人力一筆筆框出邊界、打上標籤。這在廢棄物場景中特別費時:瓶罐重疊、遮蔽、扭曲不清。
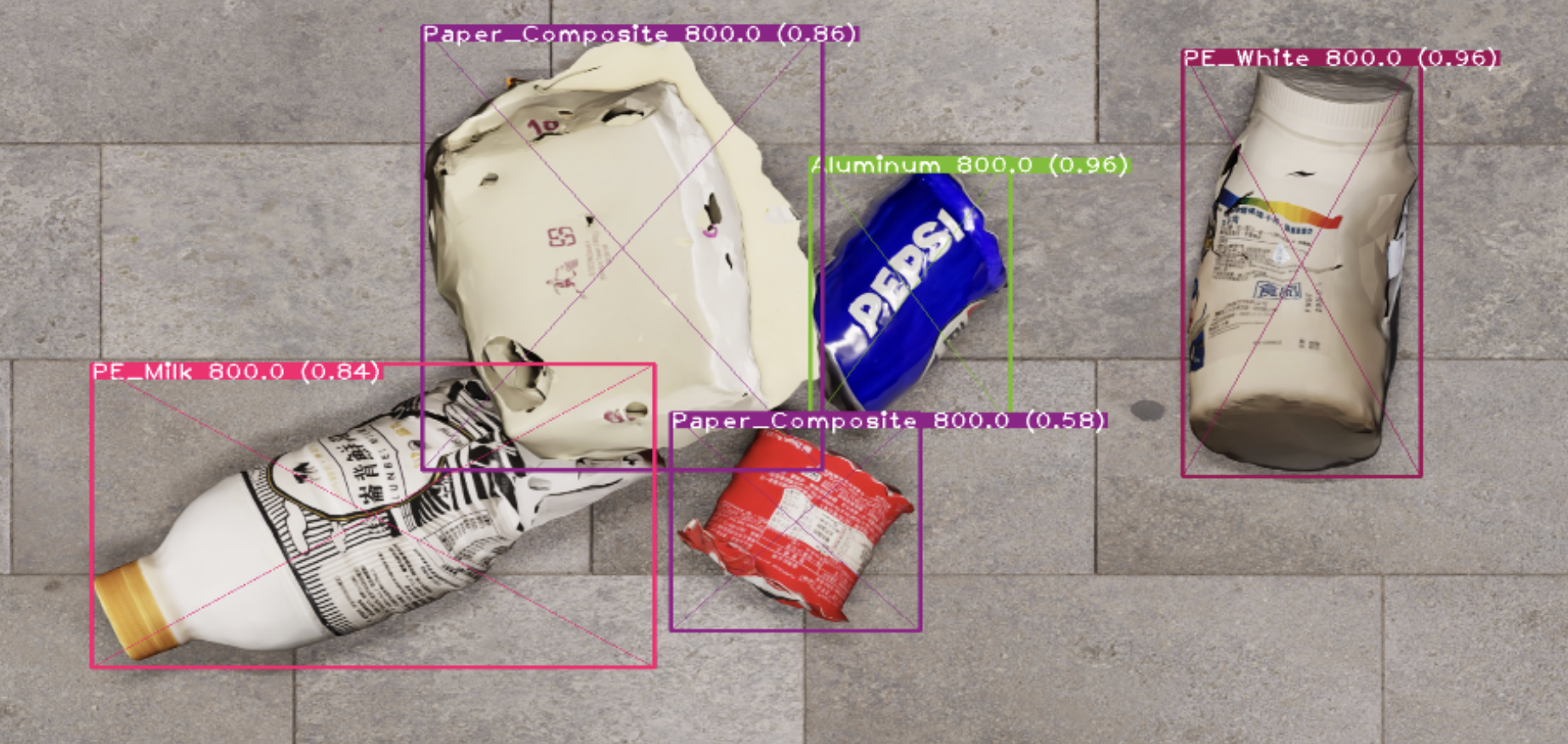
但在 Omniverse 裡,一切都不再需要人工。因為這個世界本身就是「程式生成的」。系統知道每個物件的三維位置、邊界、材質、標籤,能在渲染同時自動輸出各種標註格式──語義分割圖、邊界框、深度圖、法線圖、實例分割圖。
對 AI 訓練工程師而言,這就像是有一台永不疲倦的標註機器。每生成一幀影像,就附帶完整的標註資料,可直接用於 YOLO、Mask R-CNN、或 Segment Anything 等模型訓練。
生成的「假世界」如何教 AI 看懂真世界
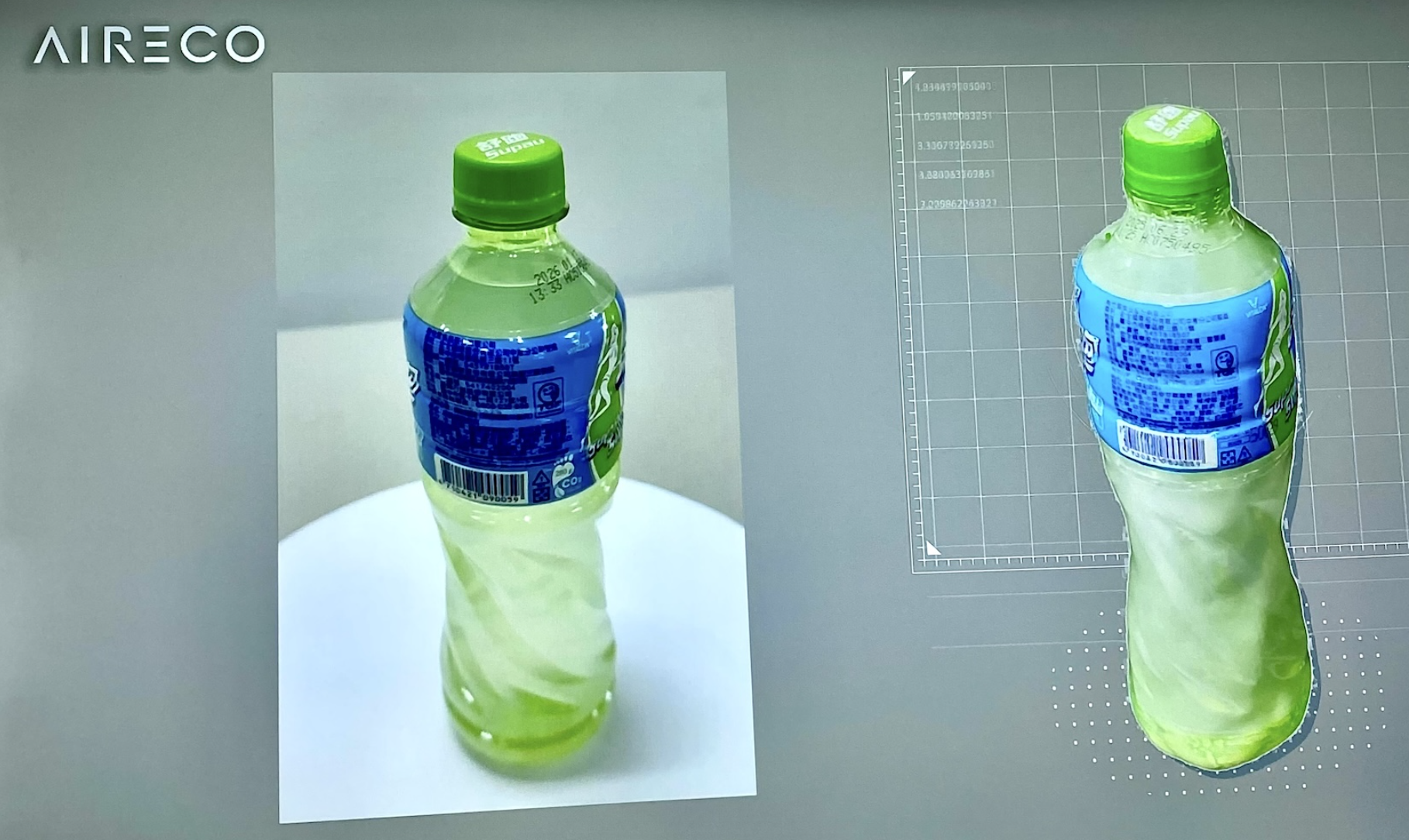
合成資料的價值,不在於逼真,而在於「多樣與準確」。真實世界的資料難以涵蓋所有狀況——被雨淋濕的紙箱、鏽蝕的鋁罐、扭曲變形的塑膠瓶、半掩在垃圾袋裡的電池。
Omniverse 的強大隨機化能力,正好能補足這一點。研究者可以控制每個維度的變化:光照角度、相機高度、背景貼圖、髒污程度、物體位置、損壞比例。AI 因此能學到「在不同條件下,同樣物件該如何被辨識」。
在一些專案中,團隊甚至結合少量真實拍攝影像,用合成資料進行初訓,再以真實影像微調模型。結果顯示,使用這樣的「合成 + 真實」混合訓練,比只靠真實資料更快達到穩定效果,也能減少標註人力超過 80%。
這種從「生成 → 訓練 → 評估 → 再生成」的循環,成為合成資料開發的標準流程。AI 與虛擬世界在此形成了一種共生:虛擬世界造出資料,AI 從中學習,再回過頭來檢驗虛擬世界的真實度。
虛擬垃圾場的啟示
在 Omniverse 中誕生的那些塑膠瓶、金屬罐與碎玻璃,也許從未存在於現實世界,但它們教會了 AI 如何理解我們真實的環境,進而提升回收場分揀機器人的判斷力與效率。

這是一種新的資料生產方式:我們不再只是收集世界的影像來訓練AI模型,而是有能力創造能代表現實世界的影像,然後更全面地去理解這個世界。
》延伸閱讀:
從產品到廢棄物:使用 NVIDIA Omniverse 生成合成廢棄物資料
從 AI 辨識垃圾到 ESG 數據追蹤:AIRECO 如何打造智慧回收工廠?
NVIDIA Omniverse for Developers

- 2026 Edge AI MCU技術趨勢與廠商方案現況比較 - 2026/03/12
- 大自然的逆向工程:Festo用20年打造的仿生螞蟻、蜜蜂與水母 - 2026/03/10
- 讓AI成為雨林金礦盜採防線:Amazon Mining Watch計畫介紹 - 2026/02/23
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


