本文由德州儀器(TI)供稿
人形機器人整合了許多子系統,其中包括伺服控制系統,電池管理系統 (BMS),感測器系統, AI系統控制等。將這些系統整合至人員體積中,同時維持複雜系統的平穩運作,要符合尺寸與散熱需求是極富挑戰性的。人形機器人中空間最受限的子系統是伺服控制系統,為了達到與人類似的運動範圍,機器人中通常部署了約40部伺服馬達(PMSM)和控制系統,這些馬達分佈在的不同部位,例如頸部、軀幹、手臂、腿部、腳趾等。
這還不包括機器人手中的馬達。若要模擬人的手自由度,機器人的一隻手即可整合十幾個以上的微馬達。這些馬達的功率需求視執行的特定功能而定;例如,驅動機器人手指的馬達可能只需要幾安培,而驅動髖部或腿部的馬達則需要100安培以上。與傳統伺服系統相比,人形機器人的伺服系統具有更高的控制精度、尺寸和散熱要求。本文說明 GaN(氮化鎵)技術在馬達驅動中的各種優勢,並展示GaN如何協助解決人形機器人伺服系統所面臨的挑戰。
更精確的控制
在伺服馬達驅動應用中,馬達控制通常可分為幾個控制迴路層:電流/扭力迴路、速度迴路、位置迴路及更高階的動作控制迴路。這些迴路通常以串接方式配置,每個都有自己的「即時」處理需求。電流或扭力迴路是最快的控制迴路。每個上游迴路在該迴路前會有多個迴路運作,並提供輸入參考至下游迴路。圖1說明典型的串接控制拓撲。
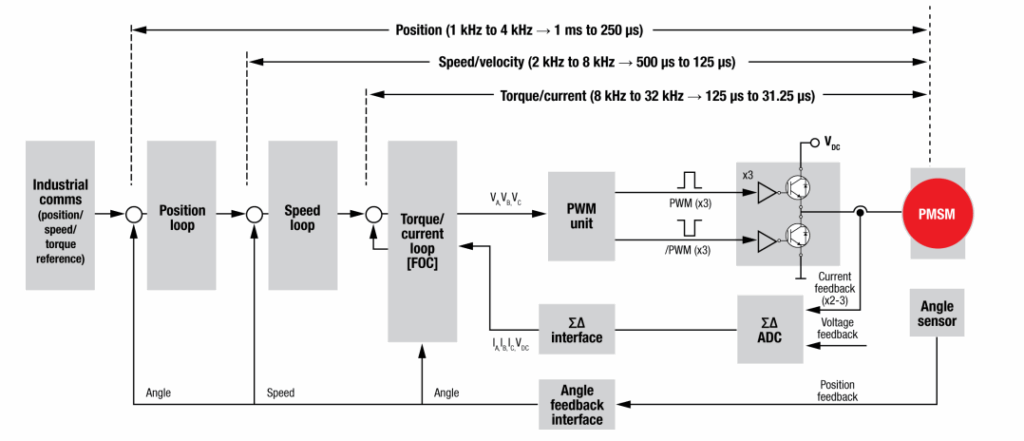
圖 1. 典型伺服馬達控制迴路
控制迴路最重要的部分是電流迴路。FET切換頻率通常與電流迴路相同,約為8kHz至32kHz。電流迴路的速度會直接影響馬達控制的準確度和回應速度。人形機器人的簡單動作包含控制許多伺服馬達。為了在機器人體中協調將40個馬達,同時維持系統穩定性,每個接頭的控制精度和反應速度必須符合非常高的要求。提高馬達控制 迴路速度和PWM頻率即可滿足這些需求。例如,100kHz(圖2)的切換頻率可以實現更高的解析度馬達電流,對應較小的馬達電流漣波和更精確的控制。高解析度馬達電流波形也代表正弦波電流更佳,可提升馬達的運作效率並減少馬達加熱。
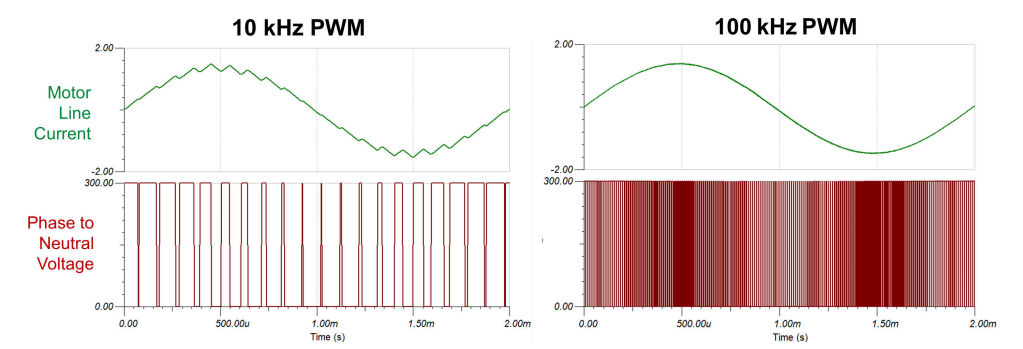
圖 2. 100kHz 和 10kHz PWM 馬達電流
此外,提高PWM切換頻率可減少DC匯流排電容器尺寸和電容。以陶瓷電容器取代電解電容器的匯流排電容需求較低。伺服功率級FET會定期利用PWM訊號從匯流排電容器汲取電流。PWM頻率增加時,每單位時間消耗的電荷量會變小,代表所需的匯流排電容也會減少。根據TIDA-010936的測試,將PWM頻率從20kHz提高到80kHz後,電解電容器可以用相等電容的陶瓷電容器替換,以獲得類似的匯流排電壓漣波。陶瓷電容器比電解電容器具有明顯的優勢:尺寸更小、使用壽命更長、高頻率特性更佳等等。
因此,在設計人形機器人時,必須考慮更高速的電流迴路和PWM頻率。對 MOSFET 架構伺服驅動器而言,PWM切換頻率增加會帶來大量額外損耗,造成驅動器嚴重加熱。當切換頻率從10kHz提高到20kHz時,MOSFET型驅動器的整體損耗會增加20%至30%,這是人形機器人無法承受的。或者,GaN FET也可在高頻率下提供低切換損耗。在TIDA-010936測試中,在40kHz和80kHz時電路板損耗幾乎相同,因此GaN適合高切換頻率情境。
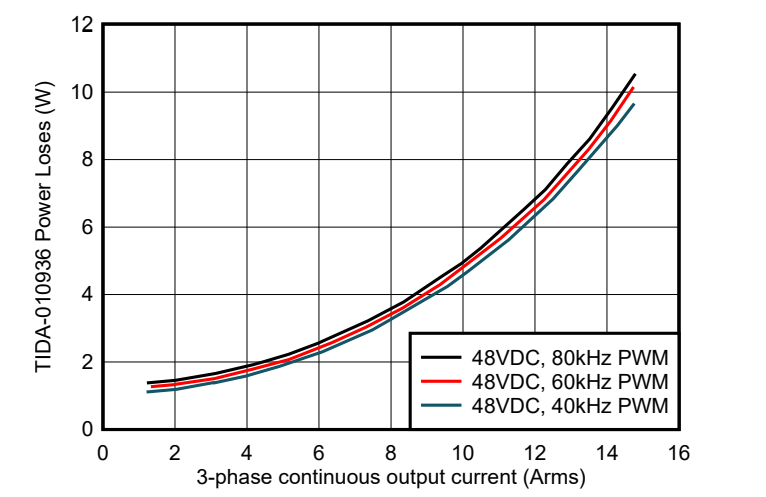
圖 3. 48V 輸入與 3 相輸出電流的 TIDA-010936 電路板損耗
降低切換損耗
GaN裝置的特性,讓GaN可實現如此低切換損耗。GaN裝置的閘極電容(Cg)與輸出電容(Coss)較小,可實現比Si-MOSFET快100倍的切換速度。由於關閉和開啟時間縮短,失效時間可控制在較短範圍內,例如10-20ns,而MOSFET通常需要約1us的失效時間。減少失效時間可降低切換損耗。此外,GaN FET沒有本體二極體,但飛輪功能可透過第三象限運作實現。在高頻率PWM情境中,MOSFET的本體二極體會造成較大的反向復原損耗 (Qrr損耗)。第三象限運作也可避免本體二極體造成的切換節點振鈴和EMI風險,以減少對高功率密度人形機器人中其他裝置的干擾。
體積更小
人形機器人的接頭空間有限。電源板通常是直徑5-10cm的環形PCB。此外,接頭必須整合馬達、減速器、編碼器,甚至是感測器。至關重要的是,設計人員必須在有限空間內實現更高功率與更穩定的馬達控制。相較於MOSFET,GaN的Rsp(特定電阻,面積與晶粒尺寸比較)較小。也就是說,較同一Rdson的MOSFET,GaN的晶粒面積較小。德州儀器(TI)透過整合FET與閘極驅動器,進一步縮小占位面積。如此可在僅4.5 x 5.5mm的封裝中實現4.4mΩΩ半橋+閘極驅動器。
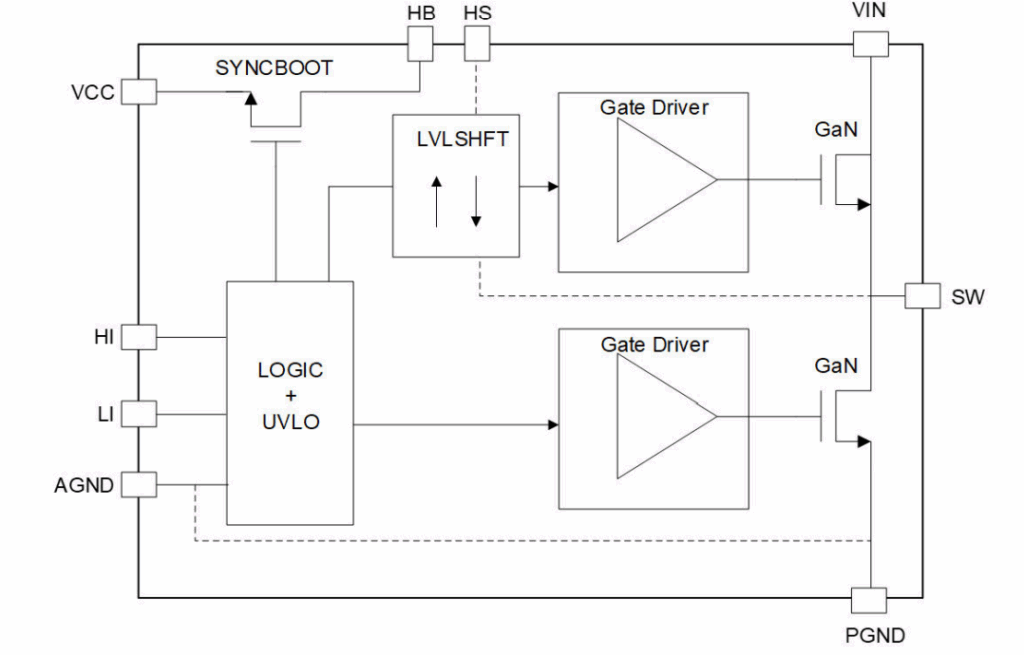
圖 4. LMG2100 方塊圖
以LMG2100R026為例。此裝置整合半橋式與半橋式驅動器的FET,可承受55A的連續電流。整合驅動器與FET有許多優點,其中包括:
- 減少閘極振鈴,實現更可靠的運作
- 以優化封裝體積減少電源迴路電感
- 可透過整合閘極驅動器來縮小尺寸
- 以整合式防護保護裝置
若要在設計中比較GaN與MOSFET,我們可看到提供類似功率位準的TIDA-010936與TIDA-01629設計。如圖5所示,由於整合式閘極驅動器與較低GaN Rsp的緣故, 整體電源裝置的晶片面積減少超過50%
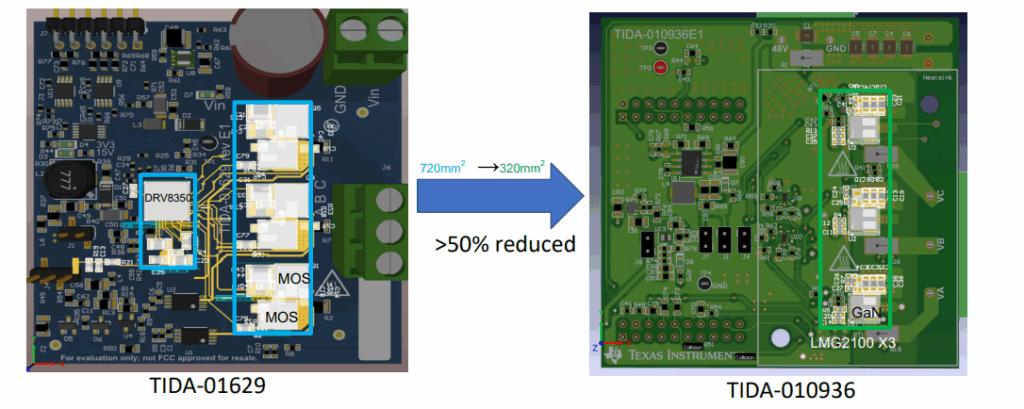
圖 5. GaN 與 MOSFET 功率級比較
小結
人形機器人對控制準確度和功率密度的要求更高。GaN可在高PWM頻率下輕鬆實現具低損耗的更高精密度馬達控制。結合GaN的高功率密度本質與德州儀器整合式驅動器的特性,可進一步縮小尺寸。有鑒於這些優點,GaN架構馬達驅動器很可能會成為人形機器人的偏好設計,以提供更有效率,穩定且更智慧的機器人設計。 除了人形機器人外,GaN技術也是其他類型機器人(協作機器人、手術機器人、 自動導引車)、工業伺服、家用電器和其他需要高功率密度的應用的絕佳選擇。

- Nordic新推搭載NPU的nRF54L系列超低功耗SoC - 2026/04/13
- 【Podcast】AI 機器人安全革命:從功能安全到軟體定義安全 - 2026/04/10
- RISC-V技術成熟度與全球AI落地應用現況剖析 - 2026/04/10
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!