作者:Bird
上一回文章【Maker電子學】步進馬達的原理與驅動—PART1,我們簡單聊了步進馬達裡面的結構,以及它爲什麼可以用小角度一步一步轉動的原理,另外也介紹了兩相式步進馬達常見的兩種接線方式。
這一回我們要來看看如何在線圈上產生讓馬達轉所需要的波形。
接線方式
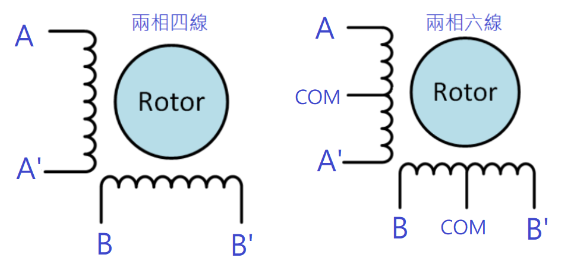
我們以最常見的雙極雙相步進馬達爲例。上次提過,這種步進馬達有四線式和六線式兩種出線方式:
(圖片來源:Bird 提供 )
這種結構的步進馬達裡面有兩大組線圈,可以稱之爲 A 線圈和 B 線圈。它的驅動方式是:
- A 相正向激磁
- B 相正向激磁
- A 相反向激磁
- B 相反向激磁
因爲兩組線圈都要可以正向和反向激磁,因此稱之爲「雙極」(bipolar)步進馬達。
至於要讓線圈的磁場方向反過來,有兩種不同的方式,最簡單的當然就是讓流過線圈的電流方向反過來。如果電流從 A 接腳流向 A’ 接腳時是正向激磁,那麼電流從 A’ 流向 A 時就是反向激磁。
但要能轉換電流方向的電路比較複雜,因此就有另一種變形的設計:六線式的步進馬達。六線式的馬達一樣有 A 和 B 兩組線圈,但它們的線圈有個「中間抽頭」,就是在線圈中間位置的一個接點,如果電流從 A 流向中間抽頭時是正向激磁,那麼電流從 A’ 流向中間抽頭時就是反向激磁。
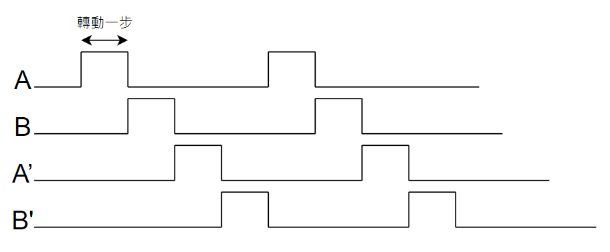
我們把六線式馬達的兩根 COM 都接地,再輪流驅動 A、B、A’、B’,馬達就會朝一個方向旋轉,這時的驅動波形是這樣的:
(圖片來源:Bird 提供 )
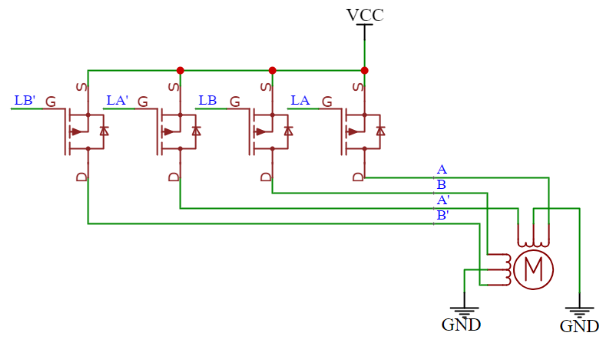
要產生並驅動這樣的波形,只需要四顆電晶體。電路大概是這樣:
(圖片來源:Bird 提供 )
我們可以用 LA、LB、LA‘、LB’ 四個小訊號去控制 MOSFET 的導通,來產生 A、B、A’、B’ 四個驅動馬達所需要的訊號。
注意這裡使用的 MOSFET 是 P-channel 的 MOSFET,因爲當我們這樣驅動時,負載是在 MOSFET 開關的後面,用馬達驅動的術語來說,這是個「high-side driver」,當它導通時電流是先流過電晶體再到負載,而因爲 MOSFET 導通時的電阻很小,電晶體本人上的電壓差也就很小,所有的 VCC 電壓幾乎都由馬達線圈承受,但由於 MOSFET 有一端接在電源上,因此不管是 source 還是 drain 的電壓都會很接近電源電壓;如果用 N-channel 的 MOSFET 來驅動的話,我們就會需要比電源電壓更高的 gate 電壓,才能驅使 N-channe MOSFET 導通。
因此在馬達驅動電路的設計上,high-side driver 多半都使用 P-channel MOSFET,而反過來說,接在負載後面的 low-side driver 則多半使用 N-channel MOSFET。
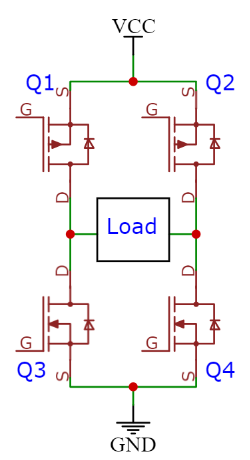
如果是四線式的步進馬達,要用什麼樣的電路,才能讓電流的方向反轉呢?這時後就會用到「H 電橋」了。H 電橋是用來做雙向驅動最常用的電路,它長這樣:
(圖片來源:Bird 提供 )
這個電路需要四顆電晶體,而且一次需要開兩顆。
當我們將 Q1、Q4 打開讓它們導通時,電流會由負載的左方流向右方,而如果將 Q2、Q3 打開的話,電流就會由負載的右方流向左方。
雖然這個電路可以讓電流的方向反轉,但它需要用到四顆電晶體來驅動一組負載。在四線式的步進馬達上有兩組線圈要驅動,因此總共會用到八顆電晶體,所需要的電晶體數量是六線式的兩倍,因此四線式的步進馬達雖然繞組設計比較簡單,但驅動電路的複雜度卻比較高。
小結
這一回我們介紹了雙極四線式和六線式步進馬達的接線方式,以及驅動它們所需要的程序與訊號,也介紹了驅動電路的結構,以及改變電流方向的方法,但由於驅動四線式步進馬達的一組線圈就需要用到四顆電晶體,兩組線圈要用八顆,這樣的電路用離散元件來拼其實蠻麻煩的,因此市面上有很多單顆 IC 就可以搞定步進馬達驅動的產品,除了放大電流的驅動電路外,這些 IC 裡面還有邏輯電路,可以用來簡化驅動步進馬達所需要的訊號。
下一回,我們會繼續聊聊這些專門用來控制、驅動步進馬達的 IC。
(責任編輯:賴佩萱)

- 【Maker電子學】Flash 記憶體的原理與應用—PART22 - 2025/02/27
- 【Maker電子學】Flash 記憶體的原理與應用—PART21 - 2025/02/21
- 【Maker電子學】Flash 記憶體的原理與應用—PART20 - 2025/01/24
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!

2025/03/11
收穫甚多~