作者:CAVEDU 教育團隊
當我們提及物聯網(IoT, Internet of Things)開發,可能首先想到的是Arduino或是ESP8266這樣的微控制器開發板。然而,Raspberry Pi的微控制器開發板——Raspberry Pi Pico W,也是一個很好的選擇。
在本專案中,將會介紹如何使用Raspberry Pi Pico W和MicroPython,並用Thonny IDE的平台來撰寫程式。
Raspberry Pi Pico W 簡介
Raspberry Pi Pico W是由Raspberry Pi基金會出品的微控制器開發板。它配備了一個RP2040微控制器,有264KB的內部RAM,並且支援MicroPython程式語言,這讓我們可以更方便地開發物聯網應用。
使用上和Raspberry Pi Pico沒有多大差別,只是Raspberry Pi Pico W 還 支援Wi-Fi 802.11n無線網路和藍牙,更多Raspberry Pi Pico相關介紹連結如下:
MicroPython簡介
MicroPython是一種針對微控制器和受限環境設計的 Python 3 程式語言編譯器和執行環境。這種程式語言實現了Python 3的大部分語法和特性,並對於開發板所需的低功耗和即時回應有進一步最佳化。MicroPython提供了豐富的API,可以直接控制微控制器的GPIO、I2C、SPI等各種硬體資源。
Thonny IDE簡介
Thonny是一個專為Python初學者設計的整合式開發環境(IDE)。它的介界面簡單,功能強大,對於學習Python語言非常有幫助。而且,Thonny IDE 也支援 MicroPython,我們可以直接在Thonny IDE中編寫MicroPython 程式,並上傳到Raspberry Pi Pico W上執行。
請由 Thonny 官方網站下載 Thonny。
電路接線圖
本次專案分享如何透過Thonny IDE來撰寫MicroPython程式,並使用PMS5003粉塵感測器取得數值和經由Raspberry Pi Pico W的Wi-Fi功能取得目前台灣時間,並顯示在OLED中。
以下介紹Raspberry Pi Pico W、Raspberry Pi Pico W擴充板、OLED、PMS5003接線圖。
Raspberry Pi Pico與擴充板接法(擴充板可相容於Raspberry Pi Pico W)
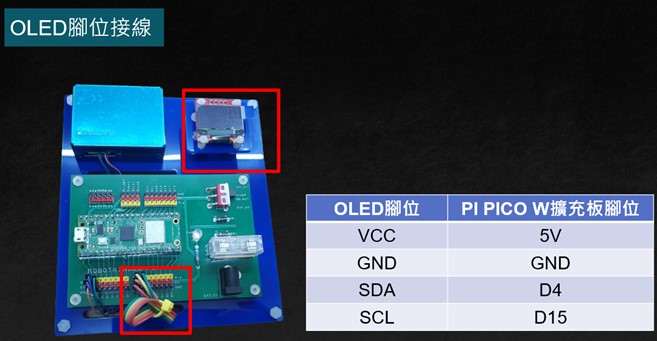
Raspberry Pi Pico W擴充板與OLED接線圖
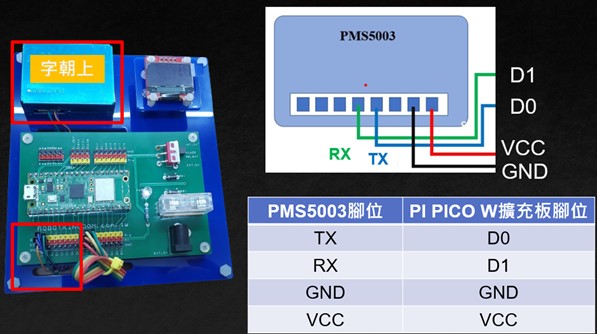
Raspberry Pi Pico W擴充板與PMS5003接線圖
接下來使用 Thonny IDE 來編寫程式,請先下載 Raspberry Pi Pico W 的 uf2 韌體檔
如何上傳Raspberry Pi Pico W的uf2檔
按住 Raspberry Pi Pico W 的 BOOTSET 按鈕時,插上USB連接到電腦,Raspberry Pi Pico W 會被電腦辨識為一個磁碟,將 uf2 韌體檔拖放到其中就會自動更新韌體。
Raspberry Pi Pico W連接Thonny IDE
- 將Thonny IDE下載至電腦,並解壓縮後開啟,請選擇
執行>設定直譯器>選Micro Python (Raspberry Pi Pico W)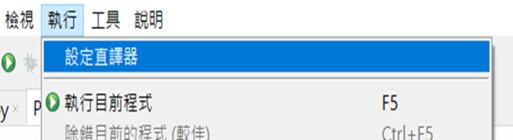
- 連接埠選擇USB序列裝置(COM X)
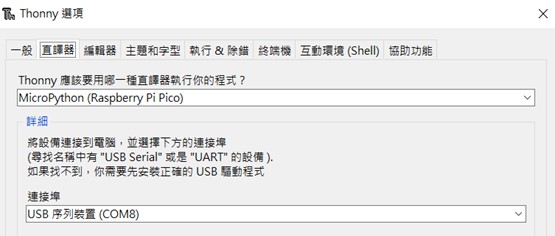
[註] COM號要記住,後續上傳程式需要正確指定 COM 號,概念如同 Aduino IDE
- 確認是否與Raspberry Pi Pico W連接
檢查 Thonny IDE 下方的 互動環境(Shell),如果沒有紅字錯誤訊息即可上傳程式,這時候還沒寫,繼續看下去吧。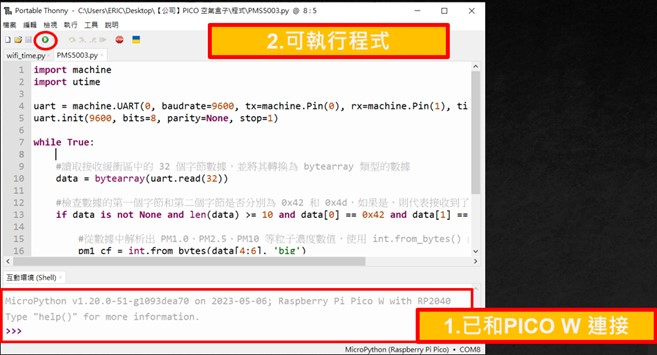
匯入OLED函式庫至 Raspberry Pi Pico W
本專案需要透過 OLED 顯示模組來顯示數值,故需要先匯入OLED 函式庫
1.下載 OLED 函式庫,檔名ssd1306.py 到您的電腦
2.在 Thonny IDE 中安裝套件
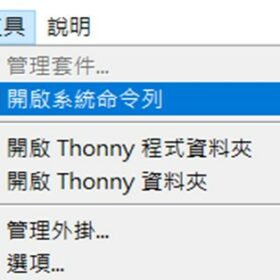
我們可由 Thonny IDE 呼叫系統命令列來安裝 python 套件,請由工具 –> 開啟系統命令列
3. 安裝 adafruit-ampy 套件
為了順利執行程式,我們需要安裝 adafruit-ampy 套件,用於透過序列埠與 CircuitPython 或 MicroPython 開發板互動,安裝方式就是一般的 pip 指令,相當簡單:
pip install adafruit-ampy
4. 匯入OLED函式庫到Raspberry Pi Pico W
cd module_library
ampy --port COM X put ssd1306.py
[註]請注意,並不是開啟下方的視窗,若出現下方視窗,則要再按一次開啟系統命令列。

5. 如何查看已匯入的函式庫
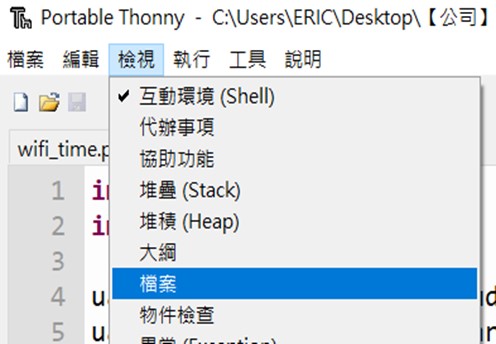
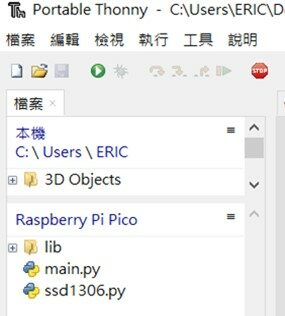
在 Thonny IDE 中,點選檢視 -> 檔案,可以查看Raspberry Pi Pico W中匯入的檔案
執行程式
本專題有兩個程式 (點我下載原始碼,或由以下複製也可以):
在 OLED 顯示時間(
)
在 OLED 顯示 PMS5003 粉塵感測器數值(
)
OLED_wifitime.py
import machine
import utime
import ssd1306
from time import sleep
import network
import ntptime
import urequests
i2c = machine.SoftI2C(scl=machine.Pin(15), sda=machine.Pin(4))
oled_width = 128
oled_height = 64
oled = ssd1306.SSD1306_I2C(oled_width, oled_height, i2c)
# 初始化 UART
uart = machine.UART(0, baudrate=9600, tx=machine.Pin(0), rx=machine.Pin(1), timeout=1000)
uart.init(9600, bits=8, parity=None, stop=1)
# 初始化WiFi
sta_if = network.WLAN(network.STA_IF)
sta_if.active(True)
wifi_ssid = "XXXXX"
wifi_password = "XXXXXXX"
sta_if.connect(wifi_ssid, wifi_password)
# 顯示WiFi連接狀態
oled.fill(0)
oled.text('WiFi:', 0, 0)
if sta_if.isconnected():
oled.text('connected', 40, 0)
else:
oled.text('connceting', 40, 0)
oled.show()
#設定時區
TIME_ZONE = 8
# 取得NTP時間
#ntptime.settime()
for i in range(5):
try:
ntptime.settime()
break
except OSError:
print('Error connecting to NTP server, retrying...')
utime.sleep(5)
else:
print('Could not connect to NTP server after 5 retries.')
# 等待一段時間
utime.sleep(3)
while True:
t = utime.localtime(utime.time() + TIME_ZONE * 3600)
oled.fill(0)
oled.text(str("%d/%02d/%02d" % (t[0], t[1], t[2])), 0, 0)
oled.text(str("%02d:%02d:%02d" % (t[3], t[4], t[5])), 0, 16)
oled.show()
utime.sleep(1)
PMS5003_OLED.py
import machine
import utime
import ssd1306
from time import sleep
i2c = machine.SoftI2C(scl=machine.Pin(15), sda=machine.Pin(4))
oled_width = 128
oled_height = 64
oled = ssd1306.SSD1306_I2C(oled_width, oled_height, i2c)
# 初始化 UART
uart = machine.UART(0, baudrate=9600, tx=machine.Pin(0), rx=machine.Pin(1), timeout=1000)
uart.init(9600, bits=8, parity=None, stop=1)
while True:
# 讀取 PMS5003 資料
data = bytearray(uart.read(32))
# 判斷是否為正確的 PMS5003 資料
if data is not None and len(data) >= 10 and data[0] == 0x42 and data[1] == 0x4d:
pm1_cf = int.from_bytes(data[4:6], 'big')
pm25_cf = int.from_bytes(data[6:8], 'big')
pm10_cf = int.from_bytes(data[8:10], 'big')
# 清除 OLED
oled.fill(0)
# 顯示 PMS5003 資料
oled.text("PM1.0: %d ug/m3" % pm1_cf, 0, 22)
oled.text("PM2.5: %d ug/m3" % pm25_cf, 0, 38)
oled.text("PM10 : %d ug/m3" % pm10_cf, 0, 54)
# 更新 OLED
oled.show()
utime.sleep(1)

- 【CAVEDU講堂】micro:bit V2使用TCS34725顏色感測器模組方法 - 2025/06/27
- 【CAVEDU講堂】NVIDIA Jetson AI Lab 大解密!範例與系統需求介紹 - 2024/10/08
- 【CAVEDU講堂】Google DeepMind使用大語言模型LLM提示詞來產生你的機器人操作程式碼 - 2024/07/30
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


