
作者:曾成訓(CH.Tseng)
前幾年,我很著迷拍攝一種稱為 Gigapixel panoramas 的相片,就是將數以百張甚至千萬張的相片拼接在一起,成了一張億萬像素的巨幅相片。它的拍攝步驟如下:
- 找一個寬闊的場景,最好是視野寬達 180 度的壯麗景色。
- 使用手動或是能自動轉動拍攝的雲台,將高像素且高倍率的相機架上。
- 由左至右並由上而下,旋轉雲台並確定每個畫面左右上下有 30 % 的重疊。
- 拍攝完後,在電腦上使用拼接軟體將所有相片接成一張。
- 將這張高達數十甚至數百 GB 的相片上傳到可支援全景高畫素相片的網站供瀏覽。
拍攝及拼接方式如下圖所示:
 變成:
變成:

我所拍攝的巨幅全景
這張是 2011 年 2 月 12 日在三峽鳶山頂拍攝地,總共由 1,863 張相片拼接完成,拼接後的相片總像素為 90 億 pixels。

(圖片來源:曾成訓提供)
在這巨幅相片中,可以逐次放大探索細節,下圖是涼亭下正在休息的人:

(圖片來源:曾成訓提供)
遠方的軍營:

(圖片來源:曾成訓提供)
於象山涼亭拍攝的台北 101,145 億像素:

(圖片來源:曾成訓提供)
70 億像素的竹東芎林全景,於橫山的大背山山頂拍攝:

(圖片來源:曾成訓提供)
於樹林大同山遠眺台北盆地,16 億像素:

(圖片來源:曾成訓提供)
彰化二水鄉全景,於名間鄉的受天官拍攝,約 18 億像素:

(圖片來源:曾成訓提供)
新豐鄕及新竹海岸線,於天德堂前拍攝,約 10 億像素:

(圖片來源:曾成訓提供)
從台北世貿樓上往下拍的兩岸旅展,畫素為 20 億:

(圖片來源:曾成訓提供)
台中科博館,122 億像素:

(圖片來源:曾成訓提供)
如何拼接相片
雖然上面介紹了這麼多自己的作品,但這並非重點,重點是瞭解如何用影像處理來拼接全景的相片。最基本的拼接方式是採用所謂的「feature based image alignment」,也就是抓取兩張相片的特徵點,然後將相對應的點對接在一起,其步驟可簡述如下:
- 找出並篩選相片中的 Keypoints/Descriptors 及對應點,例如:cv2.ORB_create –> cv2.DescriptorMatcher_create
- 取得 homography matrix,例如:cv2.findHomography
- 依步驟二產生的 matrix 變形第二張的圖片,例如:cv2.warpPerspective
- 合併第一張及處理後的第二張圖片即可得到拼接後的結果
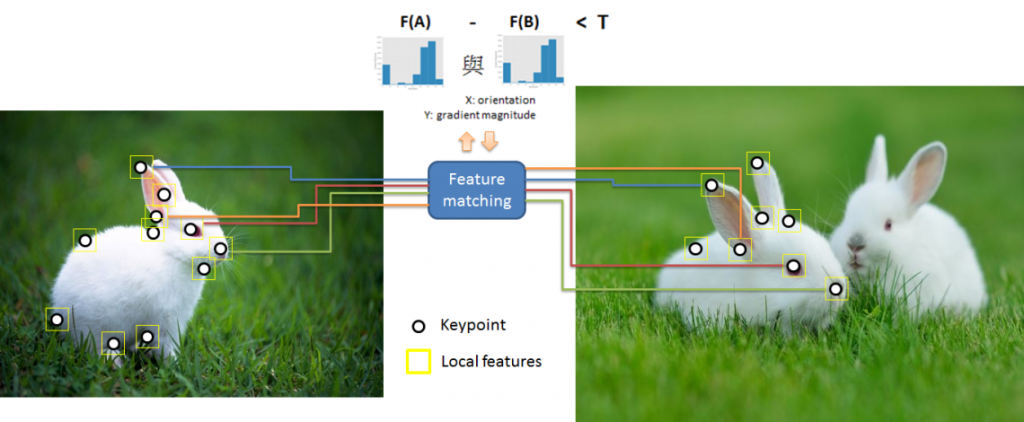
特徵點偵測的選擇
在影像中,容易被視為特徵點的不外乎是 edges、corners、blobs 等,我們將這些具有形狀特性的區域為關鍵點 keypoints,針對這些關鍵點計算並提取該特徵區域的 features,就能用來比對相片(或者辨識物體)。
(圖片來源:曾成訓提供)
其中,Keypoint detection 的演算法有很多種,OpenCV 就提供了超過十一種的方法,像是:
- FAST – FastFeatureDetector
- STAR – StarFeatureDetector
- SIFT – SIFT(nonfree module)
- SURF – SURF(nonfree module)
- ORB – ORB
- BRISK – BRISK
- MSER – MSER
- GFTT – GoodFeaturesToTrackDetector
- HARRIS – GoodFeaturesToTrackDetector with Harris detector enabled
- Dense – DenseFeatureDetector
- SimpleBlob – SimpleBlobDetector
還有以下二種方式,可和上述方法合併使用:
- Grid–GridAdaptedFeatureDetector
- Pyramid–PyramidAdaptedFeatureDetector
後方再 append 上述的各個 feature detector name 即可,例如:GridFAST、PyramidSTAR。
在拼接相片時,您可以選用任意的特徵點偵測方法,而下方以 ORB 為例作為相片拼接的示範。ORB 繼承了 FAST 運算快速特性,適用於 realtime,且其針對 FAST 方法進行強化,加入旋轉不變性(rotation invariance)。
- Pyramid 圖像尺寸並進行各尺寸的 FAST 計算。
- 使用 Harris keypoint detector 的方法計算每個 keypoint 分數(是否近似 corner?),並進行排序,最多僅取 500 個 keypoints,其餘丟棄。
- 加入旋轉不變性,使用「intensity centroid」計算每個 keypoint 的 rotation。
程式說明
本程式參考自 School of AI 的課程。
#載入必要模組
from __future__ import print_function
import cv2
import numpy as np
#最多自動取幾個keypoints
MAX_FEATURES = 500
#取得的keypoints都有分數,設定程式僅取最佳的前15%
GOOD_MATCH_PERCENT = 0.15
#進行兩張相片的拼接
def alignImages(im1, im2):
# 轉為灰階
im1Gray = cv2.cvtColor(im1, cv2.COLOR_BGR2GRAY)
im2Gray = cv2.cvtColor(im2, cv2.COLOR_BGR2GRAY)
# 偵測 ORB keypoints及取得descriptors.
orb = cv2.ORB_create(MAX_FEATURES)
keypoints1, descriptors1 = orb.detectAndCompute(im1Gray, None)
keypoints2, descriptors2 = orb.detectAndCompute(im2Gray, None)
im1Keypoints = np.array([])
# cv2.drawKeypoints的參數有五個:原始圖片、keypoints、輸出的結果圖片、繪製顏色、繪圖功能設定。
im1Keypoints = cv2.drawKeypoints(image1, keypoints1, im1Keypoints, color=(0,0,255),flags=0)
print("Saving Image with Keypoints");
cv2.imwrite("keypoints.jpg", im1Keypoints)
# 特徵匹配.
matcher = cv2.DescriptorMatcher_create(cv2.DESCRIPTOR_MATCHER_BRUTEFORCE_HAMMING)
print(descriptors1, descriptors2)
matches = matcher.match(descriptors1, descriptors2, None)
# 每個匹配到的特徵帶有分數,由小至大排序
matches.sort(key=lambda x: x.distance, reverse=False)
# 僅保留前15%分數較高的匹配特徵
numGoodMatches = int(len(matches) * GOOD_MATCH_PERCENT)
matches = matches[:numGoodMatches]
# 繪出兩張相片匹配的特徵點
imMatches = cv2.drawMatches(im1, keypoints1, im2, keypoints2, matches, None)
print("Saving Image with matches");
cv2.imwrite("matches.jpg", imMatches)
# 分別將兩張相片匹配的特徵點匯出
points1 = np.zeros((len(matches), 2), dtype=np.float32)
points2 = np.zeros((len(matches), 2), dtype=np.float32)
for i, match in enumerate(matches):
points1[i, :] = keypoints1[match.queryIdx].pt
points2[i, :] = keypoints2[match.trainIdx].pt
# 找到homography。
h, mask = cv2.findHomography(points2, points1, cv2.RANSAC)
# 套用homography
im1Height, im1Width, channels = im1.shape
im2Height, im2Width, channels = im2.shape
im2Aligned = cv2.warpPerspective(im2, h, (im2Width + im1Width, im2Height))
# 將image1圖像置換到對齊好的圖片中
stitchedImage = np.copy(im2Aligned)
stitchedImage[0:im1Height,0:im1Width] = image1
return im2Aligned, stitchedImage
if __name__ == '__main__':
imageFile1 = "my/d1.JPEG"
print("Reading First image : ", imageFile1)
image1 = cv2.imread(imageFile1, cv2.IMREAD_COLOR)
cv2.imshow("First image ",image1)
cv2.waitKey(0)
imageFile2 = "my/d2.JPEG"
print("Reading Second Image : ", imageFile2);
image2 = cv2.imread(imageFile2, cv2.IMREAD_COLOR)
print("Aligning images ...")
im2Aligned, stitchedImage = alignImages(image1, image2)
print("Saving aligned image");
cv2.imwrite("aligned-image.jpg", im2Aligned)
cv2.imshow("aligned image ", im2Aligned)
print("Saving stitched image");
cv2.imwrite("stitched-image.jpg", stitchedImage)
cv2.imshow("stitched image ", stitchedImage)
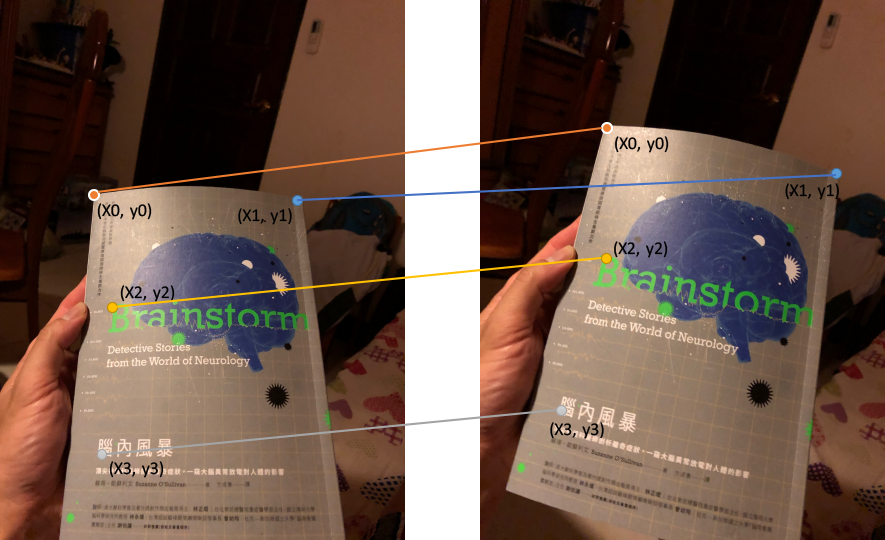
其中比較值得研究的是 cv2.findHomography 這個指令。所謂的 Homography(單應性)字面上很難解釋,但在影像處理的世界裡,一組 3×3 的單應性矩陣(homography matrix),可以讓一個 2D 平面上的所有點,與該矩陣乘積後對應到另一個變形的 2D 平面,而 findHomography 便是找出這個 matrix 的魔術師,只要給它兩組相互對應(順序相同)的 keypoints 就可以。
(圖片來源:曾成訓提供)
因此程式中 cv2.findHomography 所輸出的 h 就是 homography matrix,將它輸入到 cv2.warpPerspective 後,第二張圖片便能依據該 homography matrix 進行變形,變形後的圖片便能與第一張合併。

(圖片來源:曾成訓提供)

(圖片來源:曾成訓提供)
上圖(第一張圖)所抓取的 keypoints(下圖的紅點):

(圖片來源:曾成訓提供)
keypoints 映射:

(圖片來源:曾成訓提供)
拼接結果:

(圖片來源:曾成訓提供)
快速拼接多圖
事實上,OpenCV 內建了一個 Stitcher class 可執行快速的多圖拼接,而且效果相當不錯。使用方式如下,只需要兩行程式,便能得到拼接完成的圖片:
stitcher = cv2.Stitcher.create() status, result = stitcher.stitch(images)
(注意:舊版本的 OpenCV 使用的是:stitcher = cv2.createStitcher())
以下面以手機拍攝的 2×4 張相片為例:
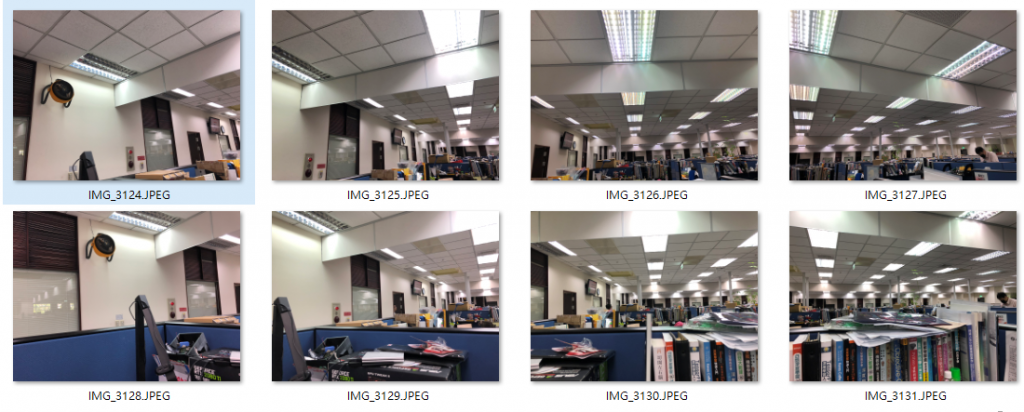
(圖片來源:曾成訓提供)
透過 cv2.Stitcher 的拼接結果:

(圖片來源:曾成訓提供)
(本文經作者同意轉載自 CH.TSENG 部落格、原文連結;責任編輯:賴佩萱)
- 【模型訓練】訓練馬賽克消除器 - 2020/04/27
- 【AI模型訓練】真假分不清!訓練假臉產生器 - 2020/04/13
- 【AI防疫DIY】臉部辨識+口罩偵測+紅外線測溫 - 2020/03/23
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!

2022/07/14
有幫助,推推