作者:阿里哥
 如果我們以移動方式來為機器人分類,可以直覺地區分成固定式和可移動式機器人。
如果我們以移動方式來為機器人分類,可以直覺地區分成固定式和可移動式機器人。
固定式的機器人,以機器手臂為例,它在工業上應用可謂相當廣泛。至於在可移動式機器人這方面,由於其可以自由移動的特性,讓我們能更積極地應用這類型的機器人。
要讓機器人靈巧地移動起來,並不是一件容易的事。為了使機器人能順利執行任務,「如何讓機器人本體移動」於機器人學本身而言是一項非常重要的課題。
目前機器人常被應用的移動方式有兩種。第一種是人類研發出來,以機械動力來驅動裝置移動的方式,或稱為機械運動法。另一個被普遍應用的方法,即師法地球上各種可以自由移動之生物的移動方式,也稱為仿生運動法。
我們接下來將分別從陸地、水中和空中這三種機器人可移動的場域,來看看有哪些可以應用的機械和仿生運動方式。
1.在陸地上移動的機器人
此類型的機器人,通常會是玩家最常接觸到的機器人類型。
(1)機械運動法:
時至今日,輪子是最常使用於提供機器人移動的方法,它可以被應用來推動許多不同尺寸的機器人平台。輪子有著相對低成本、容易設計和製作、選擇多樣等優點。車輪幾乎可以製成任何大小,小至數公分大至數百公分都有可能;3個或4個輪子則是最常見的應用數量。
此外,萬向輪(omni-directional wheel)或螃蟹輪(mecanum wheel),也可以被運用來讓機器人能更靈巧的移動。
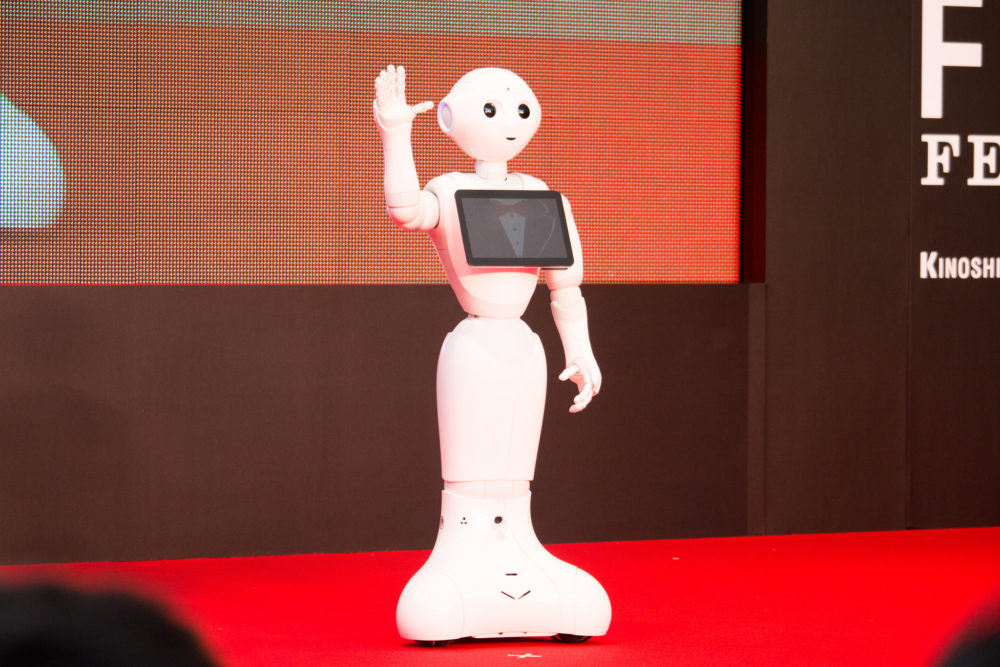
採輪式移動的Pepper(圖片來源)
另一種常用的機械裝置是履帶。沒錯!就是和坦克車一樣的那種履帶。
履帶的優點包含能減少滑移,還能平均分佈機器人的重量到地面上,使得它們可以在沙地或鬆軟的地面上移動,履帶系統也非常適合應用在凹凸不平的表面。不僅如此,履帶還可以有效地提高機器人和地面間距,而無需使用更大的輪子。
(2)仿生運動法:
越來越多的機器人模仿生物的「腿」的形式,來達成移動的目的。對於必須在崎嶇的地形上移動的機器人來說,腿通常是首選。
在自然界中常見的生物移動方式,至少包含了:雙足移動(例如:人類、企鵝)、四肢移動(狗、豹)、六足移動(昆蟲)、八足移動(蜘蛛)、腹足移動(蛇)、跳耀移動(袋鼠、跳蚤)等等。而最讓人興?的是,上述所有的移動方式,目前都已經有相關的機器人實驗室和研究機構開發出了樣品或模型。
在眾多的仿生運動中,又以模仿人類行走及運動的方式,吸引了最多研發者的焦點。它的複雜度和技術含量皆相當高,不僅需要多個自由度,還須在多顆馬達和傳感器之間取得很好的協調。

以四肢移動的機器狗(圖片來源)
2.在空中移動的機器人
(1)機械運動法:
目前常見的提供飛行動力的方式包含了:磁浮、噴設器,以及螺旋槳。
其中噴射器和螺旋槳已在遙控飛機領域上應用了數十年,也有著龐大的社群和同好團體。近年來,自動控制無人機(AUAV)和多軸飛行器技術愈趨成熟,更吸引很多機器人玩家的投入。
磁浮飛行技術則尚在起步階段,目前已經有些機構和研究單位發表了幾款激勵人心的成果,相信接下來的幾年間,非常有機會能更普及地被應用來抵抗地心引力。
(2)仿生運動法:
賦予機器人飛行能力的仿生技術,包含了模仿鳥類和昆蟲的飛行方式。
鳥類應用的是巨大的雙翼來產生升力和動力,並利用尾翼來保持平衡及控制方向;昆蟲則是應用兩對翅膀來達到飛行的目的。利用模擬鳥類和昆蟲在空中飛行的方式,可以達到高效能的操控性。例如定點停滯、瞬間移動和瞬間平移等動作。
擺動翼片(flapping foil)法,也是人類最早用來模仿生物推進交通工具的方法之一。
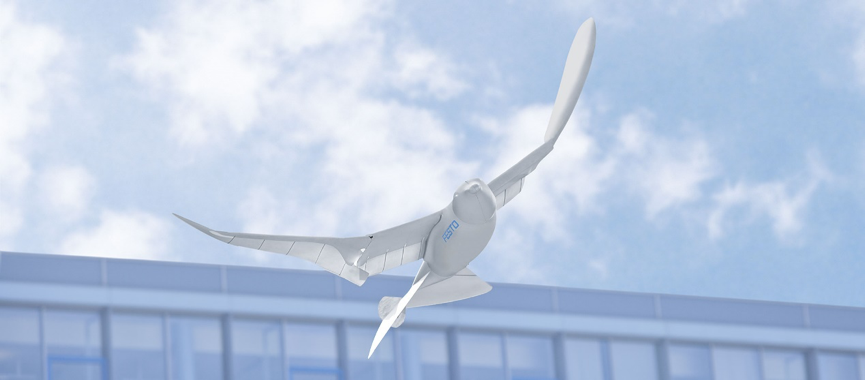
SmartBird:Bird flight deciphered(圖片來源)
3.在水中移動的機器人
地球表面大部分被水覆蓋,有很多的應用值得我們進一步探索和發現。越來越多的玩家、機構和公司投入開發無人水下航行器。
正是由於目前仍有許多障礙有待克服,因此使得水下機器人在近幾年吸引了廣大機器人社群的注意和興趣,其中有幾家公司已經將清潔游泳池的「機器人」商業化了。
(1)機械運動法:
水下的載具可以使用沉浮艙(壓縮空氣和充填水的隔間)、推進器、尾部、翼片甚至翼部來潛入水中。其它水中機器人,如游泳池清潔機器人,是非常實用的商業產品。
傳統垂直螺槳乃由數片葉片附於一轉動圓盤上所構成。另外,垂直螺槳與直昇機葉片形式的推進方式也被廣泛使用。
(2)仿生運動法:
生物在流體中的移動,有下列幾種常見的運用流體動力特性的方式:
- 噴水法:如貝類和烏賊等水中生物利用它身體的特殊構造,將水向後噴射,定利用動量守恆原理讓身體能向前推進移動
- 振翅法:類似鳥類和昆蟲在空中飛行的方式。請參考上文的空中仿生運動法。
- 擺尾法:生物力學家將魚類擺尾的方式依身體擺動範圍分為三大類,並以各自典型的魚類學名來命名,包含鰻行式 (anguilliform)、鱒行式 (carangiform)及鮪行式 (thunniform),不同類型的移動方式有其各自的優劣。有興趣的朋友可以參考「淺談流體中生物的推進方法與仿生推進」這篇文章。

魚類擺尾的方式:(a)鰻行式、(b)鱒行式、(c)鮪行式。(圖片來源)

英國科學家發明可檢測污染的機器魚。(圖片來源)
結語
人類目前在大尺度的移動技術上已有較明顯的成果,比如汽車、飛機和船舶,然而在小尺度的移動技術上還有很大的進步空間。
自然界的生物為了適應地球的生活環境,經過了千萬年的適應,演化為最適合應用於目前環境的移動方式。如此最佳化的結果,恰好可以提供我們非常好的模仿及參考的對象。機械與仿生技術的進一步整合,讓我們對機器人移動技術的成長更是充滿期待。

- 【機器人講堂】仿生科技在機器人的應用 - 2019/05/06
- 【機器人講堂】大朋友如何學習機器人 - 2019/04/18
- Maker工作環境大公開,專業玩家的自備工具 - 2019/03/10
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


