作者:Ben Shiue
陀螺旋進是日常生活中常見的現象,小時候玩過陀螺的就知道,在一定的旋轉速度下,它就能一直保持平衡。陀螺儀是一種用來感測與維持方向的裝置,其中三軸陀螺儀最大的作用就是測量“角速度”,以判別物體的運動狀態,它的應用很廣,例如用於飛行器上,就可讓飛行器知道自己目前要去哪,以及如何保持平衡穩定的飛行方向。
此篇文章為 ARM mbed 加上三軸陀螺儀(Grove – 3-Axis Digital Gyro) Block 的使用方法,首先讓大家看一下陀螺儀的外貌,如下圖:
三軸陀螺儀(Grove – 3-Axis Digital Gyro)
準備工作
這次的 Block 整合是要將陀螺儀的 Sensor Data 推送至 WebSocket。 首先第一步,我們透過 ARM mbed LPC 1768 版子將三軸陀螺儀(Grove – 3-Axis Digital Gyro)與Wifly模組串接起來,如下圖:
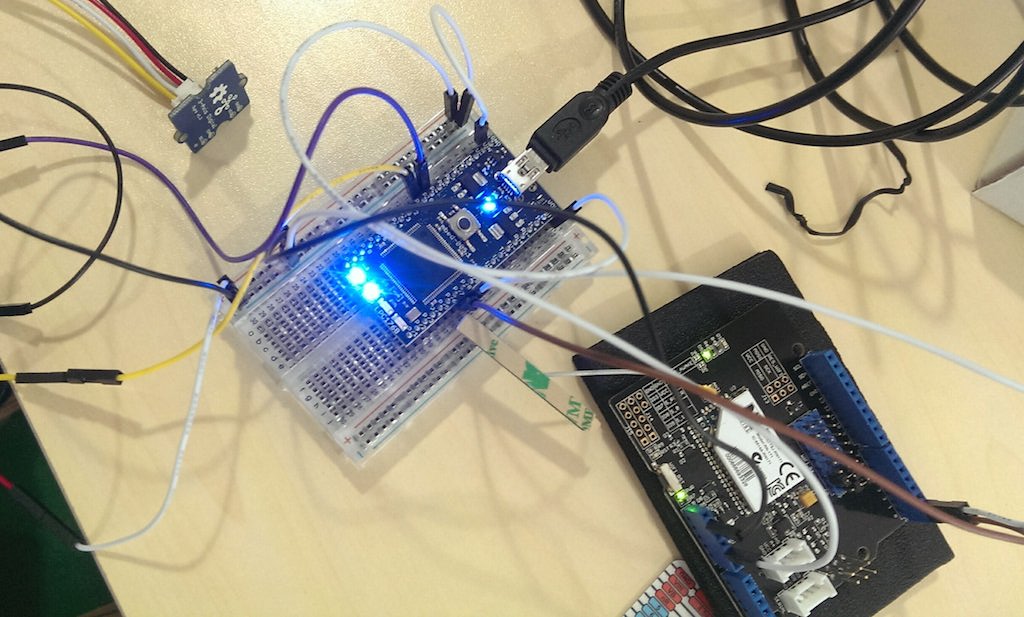
將三軸陀螺儀與Wifly模組串接起來
開始實作
接下來技術實作的部分就分為三個部分:
- Websocket channel server 服務,本文將使用 sockets.mbed.org
- ARM mbed 的 Websocket client 實作
- ARM mbed 與 Grove – 3-Axis Digital Gyro 實作
#include "mbed.h"
#include "WiflyInterface.h"
#include "Websocket.h"
#include "ITG3200.h"
/* wifly interface:
* - p9 and p10 are for the serial communication
* - p19 is for the reset pin
* - p26 is for the connection status
* - "mbed" is the ssid of the network
* - "password" is the password
* - WPA is the security
*/
WiflyInterface wifly(p13, p14, p19, p26, "WWNet", "mmmmmmmm", WPA);
DigitalOut led1(LED1);
ITG3200 gyro(p9, p10, 0x68);
int main() {
wifly.init(); //Use DHCP
//wifly.init("192.168.21.33","255.255.255.0","192.168.21.2");
while (!wifly.connect());
led1=1;
printf("IP Address is %s\n\r", wifly.getIPAddress());
Websocket ws("ws://sockets.mbed.org/ws/mbedschool/viewer");
//Websocket ws("ws://192.168.199.159:8888");
while (!ws.connect());
led1=2;
int x = 0, y = 0, z = 0, temp = 0;
//Set highest bandwidth.
gyro.setLpBandwidth(LPFBW_42HZ);
while (1) {
char data[256];
wait(0.1f);
x = gyro.getGyroX();
y = gyro.getGyroY();
z = gyro.getGyroZ();
temp = gyro.getTemperature();
printf("Temp: %d, X: %d, Y: %d, Z: %d\n", temp, x, y, z);
sprintf( data , "Temp: %d, X: %d, Y: %d, Z: %d\n", temp, x, y, z );
ws.send(data);
//wait(1.0);
}
}

Latest posts by Ben Shiue (see all)
- Node.js + Intel Edison 快速實作 REST API - 2015/08/04
- 從 0 開始,快速上手mbed Arch Pro - 2015/07/15
- 如何為ARM mbed加上三軸陀螺儀? - 2015/07/04
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


