作者:Bird
步進馬達(stepper motor)是一種在機構控制領域使用非常廣泛的馬達。現今的 3D 列印機,不管是 X-Y 平台結構,還是 delta 結構,幾乎都是使用步進馬達做爲驅動的裝置,而早年光碟機中用來控制光學讀取頭位置的馬達,也幾乎都是步進馬達。
由於步進馬達可以開環路(open-loop)控制、力矩大、好控制、誤差不會累積等特性,使它成爲許多電控機構設計的首選。
接下來的這個系列,我想跟大家聊聊步進馬達的原理、驅動,以及控制的方法。
馬達的分類 #
傳統上馬達的分類其實非常複雜,而且根據不同的特性有不同的分類方法。比方說根據驅動電流可以分成交流馬達跟直流馬達;根據有沒有電刷可以分成有刷馬達和無刷馬達;根據轉子與旋轉磁場互動的方式又可以分爲永磁馬達、感應式馬達、磁阻馬達等,而這些特性有些互斥、有些可以互相組合,再加上驅動技術日新月異,許多舊有的馬達結構在新的驅動技術下可以有更好、更不一樣的表現,因此許多傳統上馬達分類族系之間的界限也變得漸漸模糊。
與其它馬達比起來,步進馬達算是其中很特別的一個家族。在我們還沒有用來檢測馬達轉子角度的高精度的光學編碼器或是霍爾磁場編碼器時,步進馬達是唯一可以達到高精度角度、位置控制的馬達。
步進馬達的原理其實不複雜。如下圖所示,我們把圓形的轉子與定子拉直來看,它的轉子與定子都是鋸齒狀的構造,主要用來讓磁力線集中在轉子與定子之間相互對應。
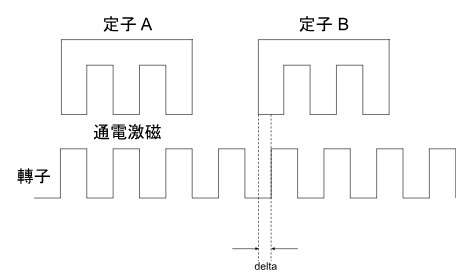
(圖片來源:Bird 提供)
在步進馬達鋸齒狀轉子的周圍,有不同相位、不同角度的定子,而定子之間排列的角度,會是鋸齒距離的整數倍再加上一個很小的角度,這個很小的角度就是這個步進馬達在單相激磁控制時,所能旋轉的最小角度。
以上圖來說,當定子 A 通電時,轉子會因爲定子 A 所造出來的磁力線,而與定子 A 的鋸齒對齊,接下來如果我們換定子 B 通電,因爲剛通電時定子 B 與轉子的鋸齒並沒有對齊,這時根據磁阻原理,磁力線會傾向走最短的距離,因此轉子會移動到讓轉子與定子之間的磁力線距離最短的位置,也就是會讓轉子的鋸齒與定子的鋸齒對齊,而這個動作,就會讓轉子往左邊的方向移動了 delta 這個小小的距離,或是更精確的來說,旋轉了 delta 這個角度。
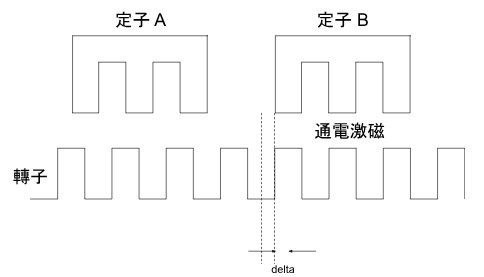
(圖片來源:Bird 提供)
但接下來如果我們繼續再改讓定子 A 通電的話,轉子會怎麼走呢?它到底要往左邊走半格、還是往右邊走半格呢?
事實上這是一個簡化過的模型,如果只有 A 和 B 兩個錯開半格鋸齒的定子,這個馬達是沒辦法轉動的,因爲如果只有 A 和 B 兩個相位,它不會有順序,我們就無法藉由激磁的順序決定馬達的正反轉(ABABABAB…… 和 BABABAB…… 的激磁順序其實是一樣的)。
因此無刷馬達至少要有三個相位,才能藉由激磁的順序決定馬達的旋轉方向。ABCABCABC…… 跟 ACBACBACB…… 是不一樣的順序,在步進馬達上也一樣。
常見的步進馬達設計通常不是三相,而是所謂的「雙極雙相」,它有兩個疊在一起的轉子,分別磁化成 S 極和 N 極。
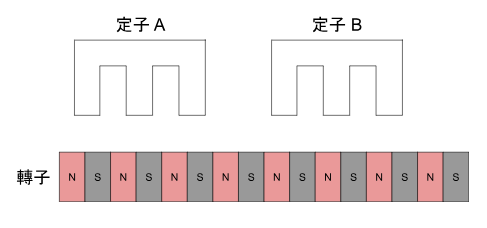
(圖片來源:Bird 提供)
再加上定子 A 和定子 B 都可以利用兩個方向的電流產生 S 或 N 的激磁,就可以做到類似四個相位的效果。
接線方式 #
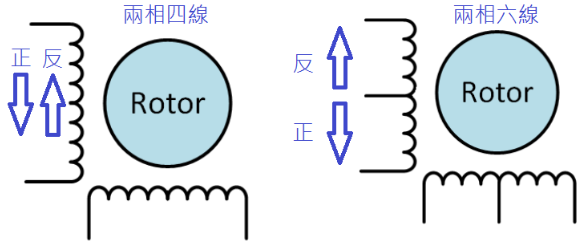
爲了讓兩個相位的定子激磁可以正反向電流驅動,兩相的步進馬達接線方式也分成四條線和六條線的不同方式,這兩種接線方式的電路圖符號是這樣的:
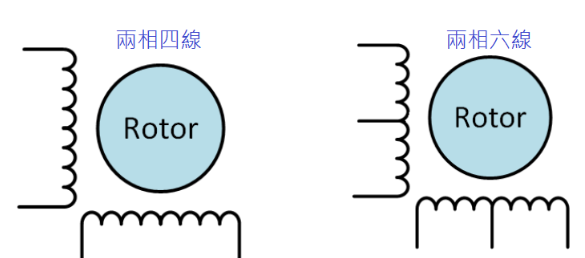
(圖片來源:Bird 提供)
而我們如果要在其中一組線圈上,產生不同極性的磁場,兩種接線方法的做法是不一樣的。四線式的做法,我們必須讓線圈上的電流反向;六線式的接法,則是利用中間那條線當電源輸入,讓電流流向不同的線圈,藉此產生不同極性的磁場。
(圖片來源:Bird 提供)
四線式的接法要讓電流的方向完全相反,需要用到類似 H 電橋的電路結構,需要四顆電晶體;六線式的接法只需要兩顆電晶體分別控制兩組線圈,就可以讓磁場方向相反,電路結構比較簡單,但六線式在大部分的步進馬達繞線方式中,每次激磁都只會用到一半的線圈,因此產生的轉矩只有使用全部線圈時的一半。
如果我們忽略六線式的中間那根線,其實也可以把它當四線式來用,就可以得到比較大的轉矩。
小結 #
這一次我們簡單聊了步進馬達裡面的結構,以及它爲什麼可以用小角度一步一步轉動的原理,同時我們也介紹了兩相式步進馬達常見的兩種接線方式。
下一回我們要來看看如何在線圈上產生讓馬達轉所需要的波形。
(責任編輯:賴佩萱)

