在過去的十年中,無人機被戲稱為「會飛的智慧手機」,其運算核心高度依賴遠端雲端。然而,隨著邊緣運算(Edge AI)晶片的突破,無人機有機會擺脫了網路延遲的限制。
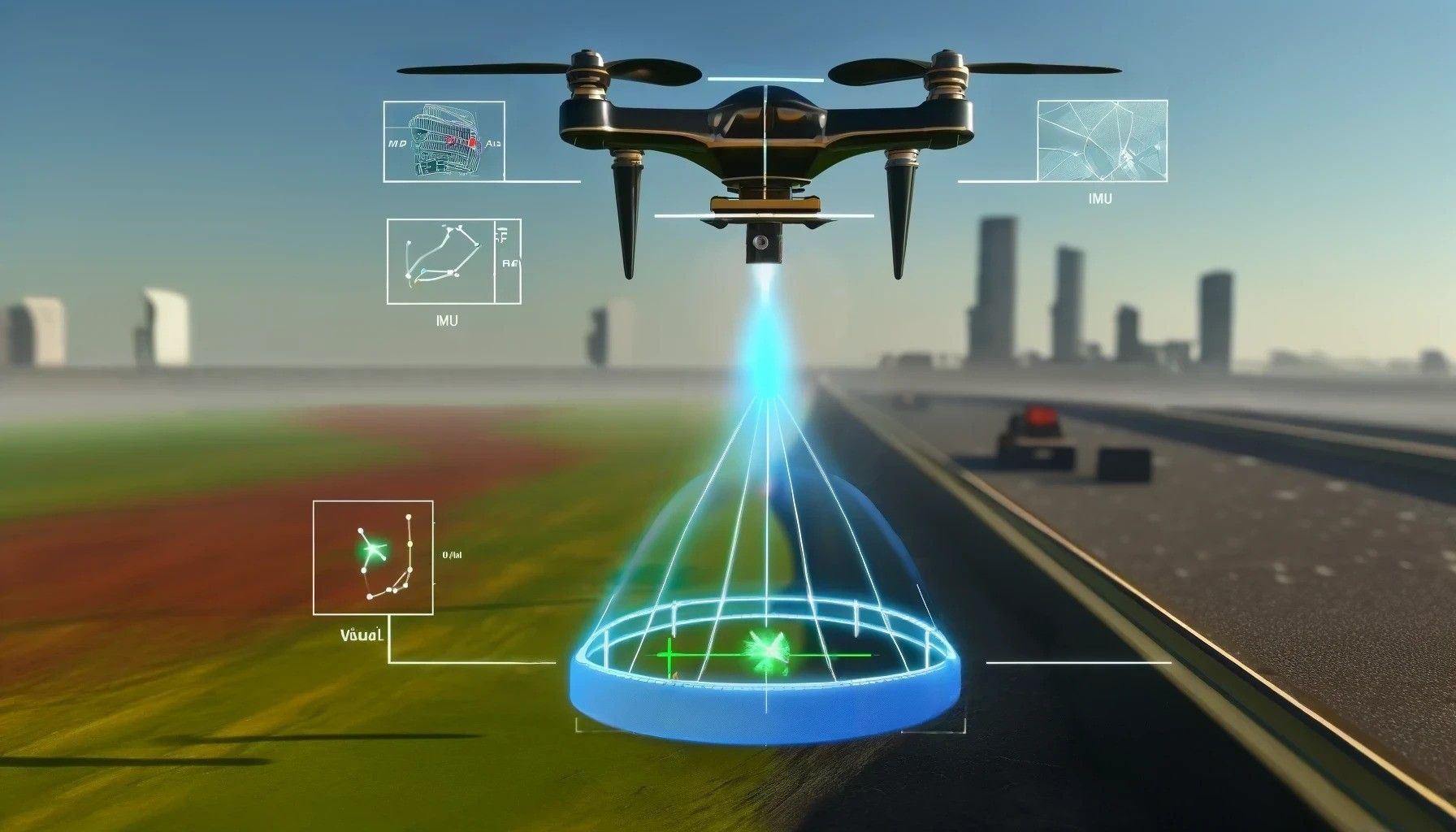
現在,從茂密的亞馬遜雨林到收訊全無的深層礦坑,無人機已能在本機端即時運算 SLAM 演算法。透過 ORB-SLAM3、Fast-LIO2 以及最新的 LIVO 技術,無人機正從「遠端分析操控」進化為具備獨立空間感知與決策能力的「智慧飛行體」。
長期以來,無人機導航面臨著一個巨大悖論:要精確定位與建圖(SLAM),需要極大的運算量;但為了減輕重量,機載電腦的效能往往不足。進入 2026 年,Edge AI 技術的成熟打破了這道藩籬。現在,無人機不再僅是影像傳輸者,而是具備自主定位與判斷能力的邊緣節點。
技術可行性:軟硬體協同的突破
進入 2026 年,Edge AI 技術的成熟打破了本地端運算力不足的藩籬。透過整合神經處理單元(NPU)的專用 SoC 晶片,無人機現在具備了在毫秒級別內處理多感測器融合的能力。這意味著無人機不再僅是「影像傳輸者」,而是具備獨立思考能力的「邊緣節點」。透過將 SLAM 演算法本地化,無人機能夠在完全斷網(GPS-denied)的環境下,達成公分級的避障與定位,真正實現了從「自動化」到「自主化」的跨越。
當前 Edge AI 實現即時 SLAM 的技術底層,建立在高效能硬體與高度最佳化演算法的深度整合上。
-
專用算力單元的崛起: 以 NVIDIA Jetson Orin 系列與高通(Qualcomm)最新專為無人機設計的晶片為例,這些平台在提供高達 100 TOPS 以上算力的同時,功耗卻被壓低在 15W 以下。這讓無人機在不顯著犧牲續航力的前提下,能即時跑動如 Fast-LIO2 這類高頻率的雷射里程計。
-
模型剪枝與異構計算: 開發者不再試圖將完整的伺服器模型塞入無人機。透過神經網路剪枝(Pruning)與 8-bit 量化(INT8 Quantization)技術,SLAM 中的特徵提取與匹配步驟被移至 NPU 處理,而位姿圖優化(Pose Graph Optimization, PGO)則留在 CPU 進行。這種「異構運算」模式最大化了機載資源的利用率。
三大主流 SLAM 演算法剖析
在 2026 年的應用場景中,無人機的「大腦」主要由三種不同的技術流派驅動,各自對應不同的物理邊界與應用需求:
1. ORB-SLAM3:精密的「視覺偵探」
作為視覺 SLAM 的巔峰之作,ORB-SLAM3 在 2026 年的邊緣端應用中展現了強大的特徵記憶能力。它透過解析影像中的「特徵點」,即使在相機視角劇烈晃動或短暫失明的情況下,也能透過「地圖重定位」技術迅速找回位置。這對於需要精準視覺辨識的室內巡檢、物流倉儲環境至關重要。
2. Fast-LIO2:迅捷的「觸感忍者」
Fast-LIO2 代表了雷射雷達(LiDAR)與慣性感測器(IMU)融合的最前沿。其核心突破在於「直接法配準」,省去了傳統點雲特徵提取的繁瑣步驟,使其運算負擔極低,能以超過 50Hz 的頻率更新位姿。在 2026 年,Fast-LIO2 讓小型無人機也能在漆黑隧道或雜亂森林中以高速穿梭,不受光照影響。
3. LIVO (FAST-LIVO2):跨領域的「多模態大師」
LIVO(LiDAR-Inertial-Visual Odometry)是 2026 年最頂尖的解決方案。它將「看(視覺)」與「摸(雷射)」完美結合。當無人機進入濃煙瀰漫(視覺失效)或面對平滑牆面(雷射失效)的環境時,LIVO 能動態調整權重,確保定位永不丟失。目前在邊緣端實現 LIVO 的關鍵,在於如何處理非同步的感測器數據流,而新一代 NPU 晶片已能完美應對這類高並發計算。

2026 年主流機載 SLAM 技術架構對比
| 技術名稱 | 感測器配置 | Edge AI 優勢 | 2026 關鍵突破 |
|---|---|---|---|
| ORB-SLAM3 | 單/雙眼相機 + IMU | 硬體加速特徵提取 | 支援語義避障 |
| Fast-LIO2 | LiDAR + IMU | 極低延遲直接配準 | 公分級地形重建 |
| FAST-LIVO2 | 視覺 + LiDAR + IMU | 多模態張量運算 | 光照退化環境下的韌性 |
應用案例:收訊全無的深層礦坑
在技術上被稱為 GPS-denied(無 GPS 訊號)環境導航,是目前 SLAM 技術最成功的商業賽道之一。舉例來說,Exyn公司的 ExynAero 無人機已能實現 Level 4 自主飛行。礦場測量員只需在坑口按一個鈕,無人機便會自主飛入完全沒有通訊、沒有導航、且人類無法進入的採空區(Stopes)進行 3D 建模,完成後自動飛回起點。

另一代表技術則是Emesent公司開發的 Hovermap 系統,已是澳洲礦業常用的解決方案,它利用 LiDAR SLAM 演算法,在深達數百公尺的地下巷道中提供公分級的精準地圖,完全不依賴雲端或外部通訊。
挑戰與突破
儘管技術進步神速,無人機在本機端執行即時 SLAM 仍面臨嚴峻挑戰。首先是「環境穩健性」,在面對白牆或玻璃建築時,視覺 SLAM 容易出錯,這正是 Fast-LIO2 發揮長處的時刻。其次是「熱管理」,高性能運算會產生劇烈熱能。2026 年的突破點在於「動態模型切換」,當無人機偵測到環境相對單純時,會自動降低採樣頻率以節省電能,成功將續航力提升了 20%。
無人機與 Edge AI 的結合,重塑了人類對物理空間的感知方式。展望未來,無人機 Edge AI 的下一步將是「分散式邊緣建圖」。透過協作 SLAM 技術,多架無人機將共享彼此的 Edge AI 算力碎片,像生物蜂群一樣,在數分鐘內完成對整座城市的災後 3D 重建。
》延伸閱讀:
-
arXiv: FAST-LIVO2 Official Paper (2024-2025):探討 LiDAR 與視覺融合的最新算法進展。
-
HKU MARS Lab (GitHub):Fast-LIO2 與 LIVO 系列演算法的發源地,提供開源代碼與實驗數據。
-
NVIDIA Jetson Edge AI Solutions:針對無人機機載電腦的硬體優化手冊。
-
Drones Market 2026-2036 Report:關於全球無人機感測器與 Edge AI 市場的技術預測。

- 【Podcast】從 LLM 到世界模型:AMI Labs 為何強勢崛起? - 2026/06/11
- 【從Vibe Coding到全能AI Agent】四大指標性AI編程與代理人工具 - 2026/06/10
- DigiKey高層分享數位整合計畫和庫存投資策略 - 2026/06/10
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!