作者:歐敏銓
「在現代戰場上,信號消失的那一刻,才是 AI 真正接管戰局的開始。」
想像一下,你正駕駛著一架價值百萬美元的無人機進入戰區。突然,螢幕閃爍、GPS 座標亂跳,隨即陷入一片雪花——你失去了「眼睛」,也失去了對飛機的控制。這是過去十年來,電子戰(Electronic Warfare)對無人機造成的致命威脅。
然而,今日的戰役因新科技而有了轉機。被譽為「國防工業中的 SpaceX」的Shield AI所開發的V-BAT 無人機,其技術優勢在於讓無人機在完全失去 GPS 和遠程通訊的情況下,仍能像人類飛行員一樣自主導航、識別目標並完成任務。本文將介紹該公司解決 GPS 干擾問題的核心技術架構。
Hivemind——給無人機一個「戰鬥大腦」
要理解 Shield AI,必須先認識其核心技術 – Hivemind(蜂巢意識)自主作戰套件。

傳統無人機像是一個「傀儡」,每一絲動作都仰賴遠端操作員的遠端操縱。一旦連線被干擾切斷,傀儡就成了斷線的木偶。Shield AI 的做法則是:直接把飛行員裝進飛機裡,這仰賴強大的邊緣運算能力。
Hivemind系統利用深度強化學習(Deep Reinforcement Learning),模擬了數百萬小時的飛行數據。它不再是死板地執行「向左轉 10 度」,而是能像飛行員一樣「思考」,理解「我要躲過這座山,並偵測後方的雷達站」這樣的戰略目標。
Shield AI 將其 Hivemind 自主作戰套件拆解為三個核心層級:EdgeOS、Pilot 與 Commander。這種架構仿效了現代軟體開發的「平台—應用—介面」模式,讓無人機從單純的硬體載具轉變為具備高度智慧的戰鬥員。以下是這三個子系統的技術定位簡介:
1. EdgeOS:自主系統的底層「神經作業系統」
EdgeOS 是 Hivemind 的技術基石,被定位為專為邊緣運算設計的「軍規級即時作業系統(RTOS)」。不同於傳統無人機依賴開源的 ROS (Robot Operating System),EdgeOS 採用了靜態配置 (Static Configuration) 的架構,確保系統在毫秒級的運作中具有高度的可預測性與低延遲。
2. Pilot:具備感知與決策能力的「數位飛行員」
Pilot 是 Hivemind 的靈魂,其定位是「自主行為目錄(Autonomy Catalog)」。它並非一串死板的程式碼,而是一個整合了感知、狀態估計、行為規劃的 AI 套件。Pilot 利用「感知—計算—動作 (PCA)」循環取代了人類的 OODA (Observe-Orient-Decide-Action)循環,讓無人機在沒有 GPS 的情況下,透過 VIO(視覺慣性里程計)和地形匹配技術,像經驗豐富的飛行員一樣識別地形與目標。
Pilot 的核心優勢在於其「戰術自主性」,它不僅負責穩定的飛行控制,更包含了一系列預標定的戰術行為,例如自動搜索特定目標、規避敵方防空威脅,或是進行空對空格鬥決策。當多個 Pilot 共同運作時,它們能自動進行「團隊協作」,無需人類下達具體指令,Pilot 就能根據戰場態勢自主分配搜索區塊,確保任務在完全靜默的狀態下仍能精準執行。
3. Commander:人機協作的「戰術指揮介面」
Commander 定位於「指揮與控制(C2)工具包」,是人類指揮官與 AI 飛行員之間的橋樑。在 Shield AI 的願景中,人類不應是無人機的「操縱員」,而應是「任務指導者」。Commander 提供了一套直觀的圖形介面與任務規劃工具,讓操作員能夠以「意圖導向(Intent-based)」的方式向無人機群下達高階指令(如「清理該區域」或「追蹤該目標」)。
在無 GPS 環境下的導航技術
當 GPS 失效時,Shield AI 的無人機(如 V-BAT)主要透過以下技術來確定自己的位置:
1. 視覺慣性里程計 (Visual-Inertial Odometry, VIO)
這是一套結合「眼睛」與「平衡感」的技術:
-
視覺(Vision): 透過板載的高清攝影機即時捕捉地面的特徵點(如岩石、道路邊緣、建築物)。
-
慣性(Inertial): 配合高精度的慣性測量單元(IMU),感測無人機的加速度與旋轉。
-
原理: AI 會計算圖像中特徵點的移動速度與角度,結合 IMU 數據,推算出飛機移動了多少距離以及方位,這稱為「相對定位」。
2. 地標特徵匹配 (Visual SLAM / Landmark Recognition)
-
無人機會預載衛星地圖。在飛行過程中,AI 會將攝影機看到的實景與內部地圖進行對比(例如:發現下方有一個特定的河口或路口)。
-
一旦匹配成功,無人機就能修正導航誤差,鎖定自己的「絕對位置」。
3. 因子圖優化 (Factor Graph Optimization, FGO)
Shield AI 的狀態估計器使用 FGO 技術,能同時融合來自視覺、雷達、IMU 及各種感測器的數據。即使某個感測器出錯,系統也能自動過濾錯誤訊息,確保導航結果的準確性。
》延伸閱讀:The Critical Role of Perception in Autonomous Systems(Shield AI Blog)
走向戰爭現場的自主無人機樣貌
Shield AI 的產品線從室內掃蕩、廣域偵察到高空噴射作戰,完整涵蓋了現代戰爭的多元場景。其核心軟體 Hivemind 在這三款機型上的落實方式,展現了 AI 如何根據環境複雜度從「空間感知」演進到「戰術協同」。
以下是 Nova 2、V-BAT 及 X-BAT 的特色定位與 Hivemind 實踐方式:
1. Nova 2:室內巷戰的「開路先鋒」
Nova 2 是一款專為複雜室內、地穴或城鎮戰設計的小型四旋翼無人機。其定位是解決士兵進入未知建築時的「致命漏斗」風險。它具備 Level 5 全自主能力,能在完全黑暗、無 GPS、無通訊且無操作員介入的情況下,自主破窗或穿門進入建築內部。

Nova 2搭載了NVIDIA的嵌入式運算模組 Xavier AGX,在運算能力、演算法設計和硬體整合方面都做出很大的突破,即使飛機身處深山地穴或強電磁干擾區,它不需要衛星、不需要基地台,也能自主感知、思考並執行任務。在 Nova 2 上,Hivemind系統的表現側重於 「微觀空間感知與障礙規避」:
-
自主探索: Hivemind 利用機載的 10 個感測器(含立體相機與熱顯像)進行即時 SLAM(即時定位與地圖構建),在毫秒內決定飛行路徑以避開家具、電線或敵軍。
-
戰術清房: AI 會模擬人類清房邏輯,自動掃描死角並識別熱源(人類)。
-
地圖生成: 任務完成後,Hivemind 會將掃描到的 3D 建築圖傳回 Commander 介面,讓士兵在進入前就掌握內部格局。

》延伸閱讀:Autonomy for the World: Indoor Exploration with Nova 2(Shield AI Blog)
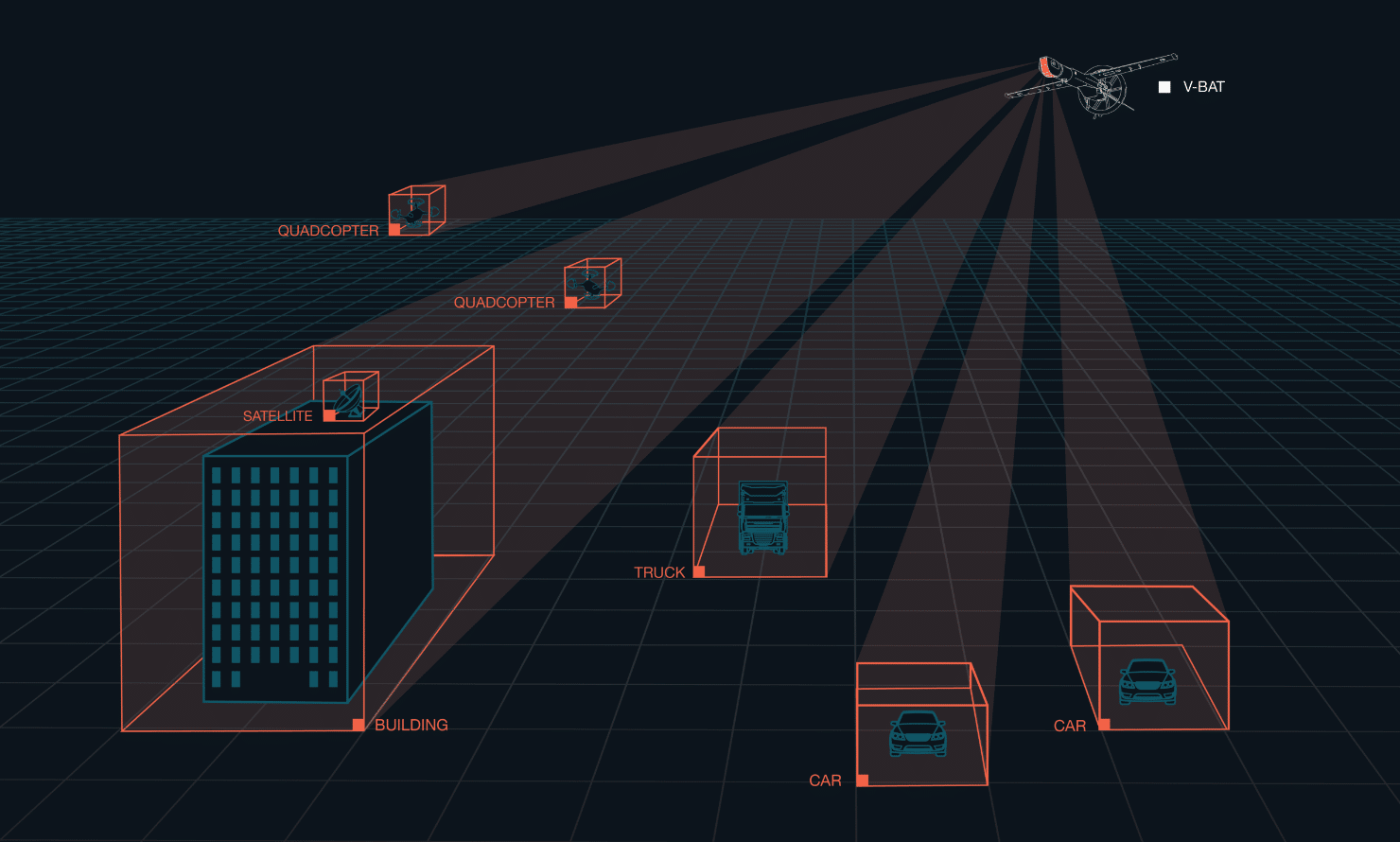
2. V-BAT:電戰環境下的「全能偵察兵」
V-BAT 是 Shield AI 的明星產品,定位為具備長航時(10+ 小時)與垂直起降(VTOL)能力的戰術無人機。其獨特的涵道風扇(Ducted Fan)設計讓它不需跑道即可在樹林、卡車或艦船甲板起降。
V-BAT 無人機不需要太空中的衛星,它利用機身上的高清鏡頭觀察地面。AI 會掃描地形特徵——一塊岩石、一段河道、或是一個廢棄的哨所。透過將實景與內建的 3D 地圖進行秒級比對,它能精確算出自己的經緯度。在 V-BAT 上,Hivemind 系統演進為 「宏觀導航與狼群協同」:
-
無 GPS 導航: Hivemind 透過 VIO(視覺慣性里程計) 與地標匹配技術,直接利用地表特徵導航,徹底擺脫對衛星信號的依賴。同時搭載了 Sentient Tracker 技術,能在完全沒有 GPS 指引的情況下,自動發現並追蹤地面移動目標。
-
V-BAT Teams (蜂群): Hivemind 實踐了「去中心化協同」,一名操作員可指揮多架 V-BAT。AI 會自主分配搜索扇區,若其中一架發現目標(如敵方坦克),群體會自動重新佈陣進行多角度追蹤,而無需人手調整。
》延伸閱讀:Revolutionizing V-BAT Operations: Navigating Autonomy in Single and Team Missions(Shield AI Blog)
3. X-BAT:未來禁區的「AI 噴射戰鬥員」
2025 年底剛推出的 X-BAT 是全球首款 AI 駕駛的噴射動力 VTOL 戰鬥無人機。它具備隱身塗層、2,000 英里以上的航程以及高空超音速飛行能力。其定位是作為「數位僚機」或獨立打擊群,深入傳統防空系統極其嚴密的禁飛區(Contested Environments)執行致命任務。
在 X-BAT 上,Hivemind 達到了最高階的 「高動態戰術博弈」:
-
機器速度 OODA: 針對噴射機的高速特性,Hivemind 的 EdgeOS 優化了運算延遲,讓 AI 能在毫秒內完成觀察、判斷、決定與行動,其反應速度遠超人類飛行員。
-
自主格鬥與防空壓制: Hivemind 搭載了經 DARPA 驗證的空戰演算法,能自主執行機動格鬥,並與有人戰機(如 F-35)進行語音與數據上的協同,成為真正的「數位神經節點」。
三款無人機定位比較表
| 特性 | Nova 2 | V-BAT | X-BAT |
| 環境定位 | 室內 / 隧道 | 野外 / 海上 / 戰術偵察 | 禁飛區 / 高空打擊 |
| Hivemind 重點 | 360° 避障、室內建模 | 無 GPS 導航、蜂群協同 | 高速戰術博弈、隱身滲透 |
| 起降方式 | 垂直(手持/地面) | 垂直(無跑道) | 垂直(具備噴射推力) |
| 航程 / 航時 | 短距離(< 20 分鐘) | 中長程(8–11 小時) | 極長程(> 2,000 英里) |
結語
深度分析Shield AI 成功的關鍵,在於將導航權權歸還給無人機本身的「去中心化」思維。透過電腦視覺取代衛星信號,透過板載 AI 取代遠端遙控,這讓無人機在電子作戰愈發頻繁的現代戰場中,依然能維持致命的精準度。
Shield AI 會致力於自主技術的研發,與該團隊多位成員的從軍背景有關。其中共同創辦人 Brandon Tseng(曾國光) 曾是美國海軍海豹部隊(Navy SEALs)的一員,多次部署於阿富汗與中東戰場。
他多次在訪談提到,投身Shield AI並非為了取代人類,而是基於他們在戰區親歷的「痛點」:讓 AI 代替人類進入戰場,將風險從士兵轉移到可消耗的機器上,而自主技術正是實現 「讓戰爭不再以犧牲生命為前提」 的唯一途徑。他們希望透過 AI 提高戰場透明度,減少誤傷平民的可能性,並確保自家的戰友能平安回家。
更深一層的動力則是,始終站在「戰力」技術的最前端,才能擁有對對手的強大威攝力,避免衝突升級,而實現這一目標將帶來最大的勝利:無需戰爭的勝利。
》下期故事:抗干擾!無人機如何完成戰場狙擊協同任務

- AI如何讓機器人更有「人」味:跨越雙手協同鴻溝! - 2026/03/17
- 2026 Edge AI MCU技術趨勢與廠商方案現況比較 - 2026/03/12
- 大自然的逆向工程:Festo用20年打造的仿生螞蟻、蜜蜂與水母 - 2026/03/10
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


