作者:陸向陽
隨著多軸無人機越做越大,從攝影、貨運到可以載人,近年來有許多公司以電動垂直起降(eVTOL)、空中計程車(Air Taxi)概念順利在NASDAQ掛牌即是例證。然多軸無人機的任務更加繁重,也就更需要重視其安全性,畢竟重物掉落、載人無人機墜毀等,後果不堪設想。
為此加州理工學院(California Institute of Technology, Caltech)投入一項發展,期望用人工智慧神經網路技術來提升多軸無人機的飛行安全性,此發展技術稱為NFFT,全稱Neural-Fly for Fault Tolerance,顧名思義是運用神經網路技術讓無人機的飛行具有容錯(錯誤容忍)能力,或說具有飛行安全方面的自適(自我調適)性。
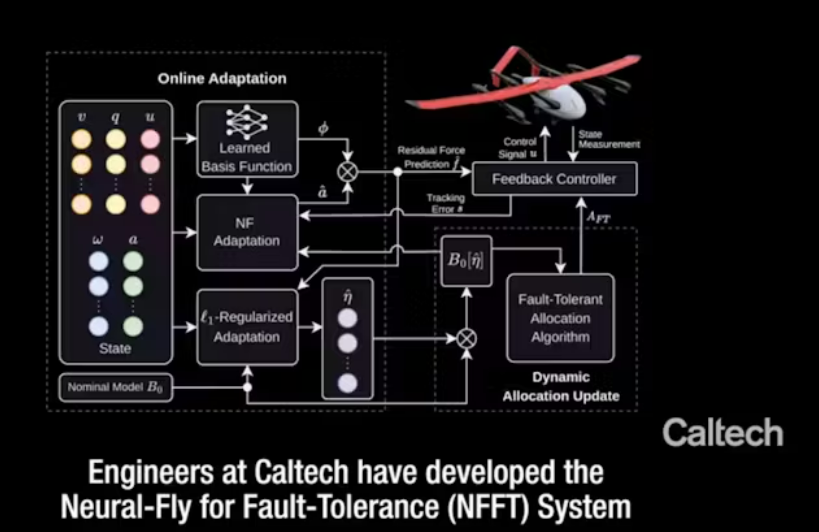
圖1 NFFT安全飛行演算技術示意圖(圖片來源:Caltech)
目前無人機確保飛行安全的方式是埋設大量感測器,例如加速度感測器、陀螺儀、地磁感測器、大氣壓力計、GPS全球定位系統等;同時為了避障也可能加上攝影機、紅外線測距器、超音波測距器、雷射測距器、UWB超寬頻測距器等。
大量的感測器均是用來確保飛行姿態正確、飛行過程安全,缺點是無人機的重量增加、耗電增加,進而縮短空中續航性。況且,裝設的感測器越多,感測器的故障率也會提高,六軸無人機裝了六個感測器、九軸裝了九個,任何一個感測器故障都會造成飛行困擾。
透過AI推論讓飛行具備容錯力
而加州理工學院提出的NFFT,目標是運用較少的感測器資料輸入,透過人工智慧模型的推論,就可以知道無人機目前所處的飛行姿態、所遭遇的外界狀態,推論結果進一步發送控制命令給無人機上的螺旋槳驅動馬達,透過馬達轉速的改變實現補償性的飛行控制動作,以此維持無人機的飛行安全。
舉例而言,多軸無人機在飛行時,可能其中一個馬達開始有些故障,轉速忽快忽慢,或飛行途中遭遇強烈陣風,多個馬達的轉速均程度性變慢,這些狀況下轉速資料輸入到人工智慧模型中,模型透過推論後,即可得知目前遭遇的情況,從而對馬達發出新的控制命令,例如讓其他正常的馬達也對應性地調整速率,確保飛行持續平衡、安全。
也由於為許多的狀況是透過神經網路推論來獲知,所以理論上就不再需要設置那麼多感測器,感測器類型與數目可以減少,但依然能獲知外界狀態,至少獲知到足以安全調控飛行所需的資訊,加州理工學院稱此為「虛擬感測器」,意思是透過人工智慧的演算法模型推論,達到與感測器相同的效果,如此的效益是讓無人機減重、省電、續航力提升。
循此思維,進一步也可以推論出哪個感測器偏差或失靈?哪個驅動馬達開始失效不靈光?後續檢測維修上也會更快速。
既然要透過AI推論來進行飛行補償,那麼速度就必須夠快,加州理工學院表示NFFT技術可以在一秒鐘內就對外界狀況作出相對反應,如此才能確保安全。另外加州理工學院也強調NFFT技術並不是只適用於無人機的初學駕駛,意思是這不是一項防呆技術,而是從初學到熟練的專業駕駛都適用且有必要的飛行安全機制。
再者,NFFT技術既用於多軸旋翼型無人機,也用於旋翼(類似直昇機)與定翼(類似一般飛機)搭配的無人機。旋翼與定翼搭配的好處是既可以垂直起飛降落,也可以在飛行過程中藉由定翼的升力而飛的更遠更久,事實上現階段NFFT技術試行的無人機即是旋翼與定翼搭配的機種。
除了用於飛行載具外,加州理工學院也期許相同的技術與構想能用於船舶型載具或陸上運輸載具上,但必須重新訓練出對應合用的模型。

圖2 用來試行NFFT技術的無人機(圖片來源:Caltech)
小結
最後,各位或許不知為何近年(約是2005年)來才開始流行多軸無人機?事實上早在約百年前人類就已經嘗試過多軸無人機,但當時是以機械連桿方式讓一個駕駛操控同時操控多個轉軸,人類難以分心兼顧多個轉軸的操控,故飛行狀態不穩定,最終是以單一大旋翼搭配一個輔助旋翼的直升機勝出,一直到加速度感測器降至消費性價位,並透過MCU快速感測與補償控制,人不再需要分心,才使多軸設計能穩定飛行,多軸無人機才開始實用。
循此道理,若能實現一個夠快速智慧的AI模型,從而取代現行多軸、多感測器才能實現的安全補償操控,甚至超越,那麼無人機控制技術可說是更上層樓了!
(責任編輯:謝嘉洵。)
延伸閱讀

- 小米AI眼鏡內部解析:元件緊湊性考驗 - 2026/04/08
- 小孩才選擇!Arduino VENTUNO Q全都要 - 2026/03/26
- 樹莓派也能「養龍蝦」! - 2026/03/24
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


