作者:林彥維
不遠的未來會是個無人機在空中飛、無人車在地上跑的時代,讓人不禁想像海上無人艇的發明與改良是否會開啟另一次的航海時代呢?日前在2017年通訊大賽拿下「聯發科技物聯網開發競賽」首獎的林立人博士,在《南科AI_ROBOT自造基地》分享他打造給無人小艇用的智慧船外機的動機與挑戰。
喜歡親近海洋,常在閒餘時駕船出航,被船友稱作「林桑」的林立人博士於科技大廠工作二十年。擁有台大機械系博士背景的他,其實Maker魂一直在心中靜靜燃燒,嚮往著發揮所學開發機器人。從職場退下後,有了更多時間接觸有興趣的領域,重新學習,實現多年來自己動手開發的渴望。
「一開始參加通訊大賽只算是個督促自己的動力,能拿到獎也是無心插柳柳成蔭了。」林立人笑著回憶製作智慧船外機參賽的契機。
林立人博士在「南科AI_ROBOT自造基地」分享智慧船外機開發心得
幫小艇裝大腦
無人艇(Unmanned Surface Vessel)與無人載具的概念相同,透過機器運算,可自我操舵航行於海面進行任務。無人艇的應用現今多半用於軍事與學術研究,而林立人的創新在於與普遍打造整台無人載具的思維不同,只要將他開發的智慧船外機如普通船的外機一樣安裝於船身後,便能讓任何無動力的氣墊船轉變為疾馳於海面的智慧無人艇。
這份靈感來自於林立人對水上救援、跨島運輸、監測水汙染等需人力成本或有安全疑慮工作環境的想像;實際完成的就是這台高96公分、寬38公分的智慧船外機。

機器船外機與橡皮艇的結合使用(圖片來源:林立人博士提供)
船外機外觀上看來並不大,但易於安裝,且一體成形的馬達、船舵、螺旋槳,運算核心元件其實都是林立人突破許多技術障礙才完成的,就像辛巴達越過危險的七大洋,在此次分享會中也分享四個他遇到的挑戰。
勇渡險浪
第一個挑戰是引擎與船體的結合,林立人想要設計的是易於拆卸與安裝於任何船體、電源隨開即用的船外機。所以他選擇把螺旋槳、船舵以外的各種線材與機組都以外殼包覆,同時整合與保留足夠的的扭矩讓船舵能順利改變航向。因此,這台船外機不像其它市面上的船外機組裝動輒就需兩三天,可以簡單安置又保有足夠動力與操舵穩定性。
第二個挑戰是航行所需的資訊運算。要讓一艘船不靠人掌舵,就能在海平面上乘風破浪,可不只是下水,啟動引擎就好。在每一個航行的環節都需要計算各種因素,例如:GPS、路線規劃、船速、舵角與航向、船舵與螺旋槳控制、電源、通訊等;同時也需要能清楚且順暢地向各個元件傳輸資料,才能確保船艇航向正確的方向。面對如此龐雜的計算,在系統架構規劃上將上述不同的功能以LinkIt ONE面板為核心分配給不同控制器管理,如此一來就能分擔計算,增進運行效率。
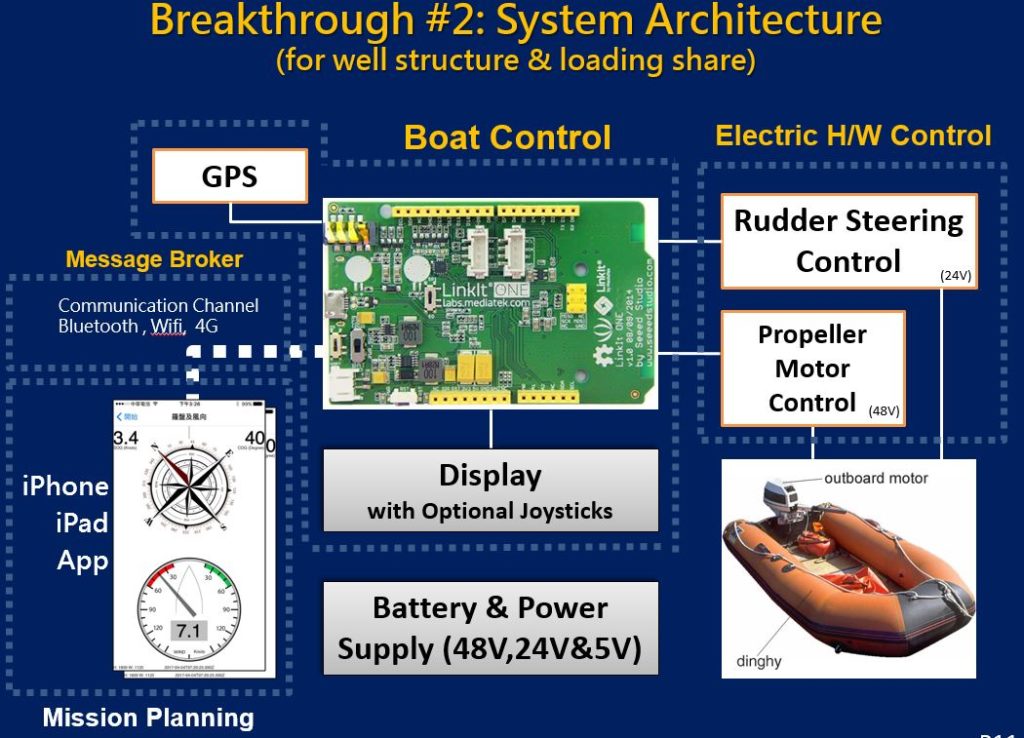
林立人博士清楚劃分系統架構圖,分配各控制器的運算與反應職責。(圖片來源:林立人博士提供)
第三個挑戰是航行時來自外部的影響。這些影響包含洋流的流速、風向等。面對在程式編碼中處理這些極為多變的因素,林立人認為數據建模是其中關鍵,特別強調若能在最初就彙整好可能運用到的功能與變數,並架構出清楚表示資料傳輸與反饋等互動的完整模型,就能毫不遺漏地編程,達到事半功倍的效果。
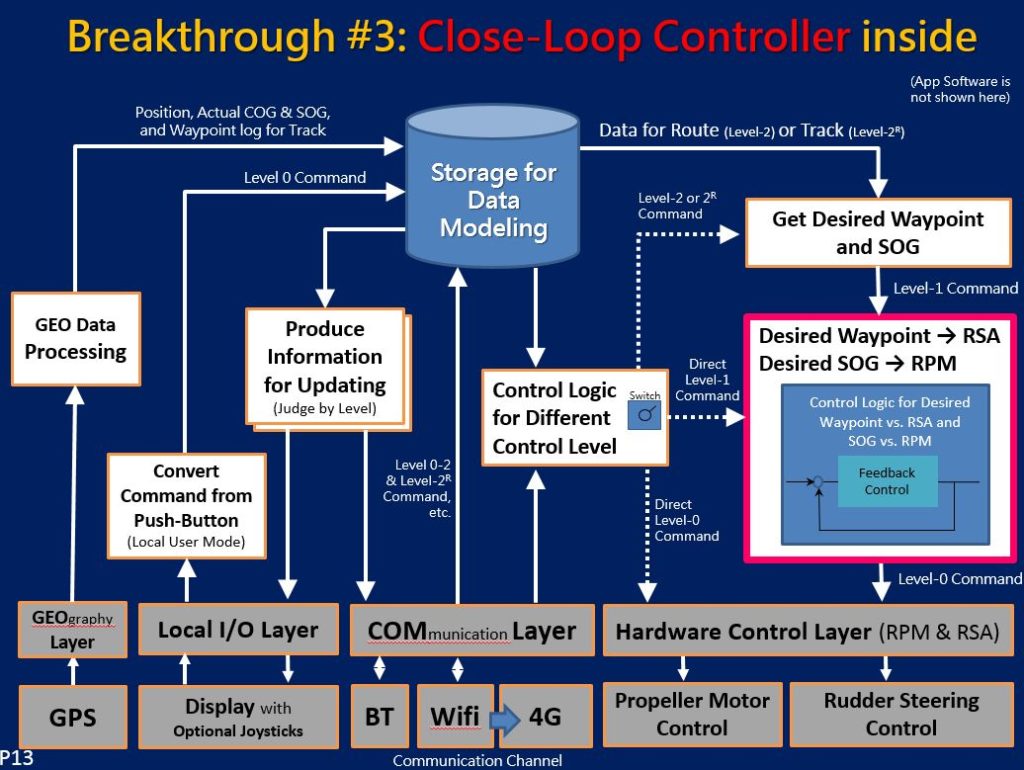
開始編成前,做好數據建模可以事半功倍。(圖片來源:林立人博士提供)
最後他提到規劃路徑與控制航向的設備,在軍事與學術研究中所使用的遠端控制設備,往往需要兩台電腦及螢幕才能容納各項海圖資訊。但林立人在設計的過程裡,想要擺脫複雜與沉重的介面與設備,增加輕便與易用性;為此著手編寫了智慧船外機專用的IOS APP,功能一應俱全,既能設定航線,也可以藉由介面自由掌舵。
對於從未寫過APP的林立人,以自身經驗為例鼓勵大家別害怕寫程式,若找到有興趣的主題開發,學習新事物就能成為很好的學習動力。

解決種種問題,小型無人艇在安平港出航!(圖片來源:林立人博士提供)
未來的海圖
林立人自我分析這項發明的影響,說到:智慧船外機可以降低無人艇的成本,且能提供給遠端監控、港口管理、水上救援、跨島運輸等許多尚未被滿足需求的領域所使用。而目前他也計畫解決更多技術上的問題,例如迴避障礙物、拓展通訊傳輸的範圍、利用太陽能板發電增加航行距離、結合攝像鏡頭應付更多元的任務,期許在未來能有更多有關小型無人艇創新應用的發想。
動手做最快樂
從看見問題,試圖想出解決方式,並靠自己的雙手以有限資源打造出創新作品,填補市場上的長尾空缺,幫助更多需要幫助的人,林立人博士的智慧船外機開發歷程就像Maker的典範一樣地鼓舞人心。
對於林立人來說,繼續「動手做」的路必然不會就此止步,畢竟促使他不斷前進的並非是得獎,更是那份汪洋大海般的「動手做」的快樂。

50來位社群朋友從中南部擁躍出席林立人的分享會
(本報導整理自2018/1/13在南科AI_ROBOT自造基地舉辦的「Mini USV自造無人小艇分享會」;責任編輯:葉于甄)

- 【人物專訪】酷設工坊的Jarvish智慧安全帽,讓騎車更便利 - 2018/11/05
- 【Maker盛事】自造零設限,下一位自造者就是你! - 2018/10/03
- 【人物專訪】少年Maker黃仁澤的自造遊樂園 - 2018/09/11
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


