作者:陸向陽
眾所皆知,因GenAI/LLM的興起使NVIDIA的資料中心晶片業務營收爆增,但NVIDIA也不全然押注在資料中心,而是持續拓展其他的晶片需求,包含自駕車、量子運算等,而機器人也是其一。
針對機器人領域去年NVIDIA技術年會(GTC 2024)就提出Isaac GR00T(Generalist Robot 00 Technology)專案,期望開發出一個多模態的AI模型,並將模型用於人形機器人(Humanoid)內部,今年GTC 2025已有初步成果,NVIDIA宣佈開發出GR00T N1的基礎模型。
GR00T N1
GR00T N1模型是採雙系統設計,第一個系統為動作性的快速反應,第二個系統為深思熟慮、條理決策。NVIDIA發起與建立此一基礎模型,用意是希望讓有心想開發人形機器人的業者能減少起步時間,直接以GR00T N1模型為基礎延伸發展,以加速開發,在GTC 2025年會上NVIDIA是用Jetson AGX Thor來跑N1模型。
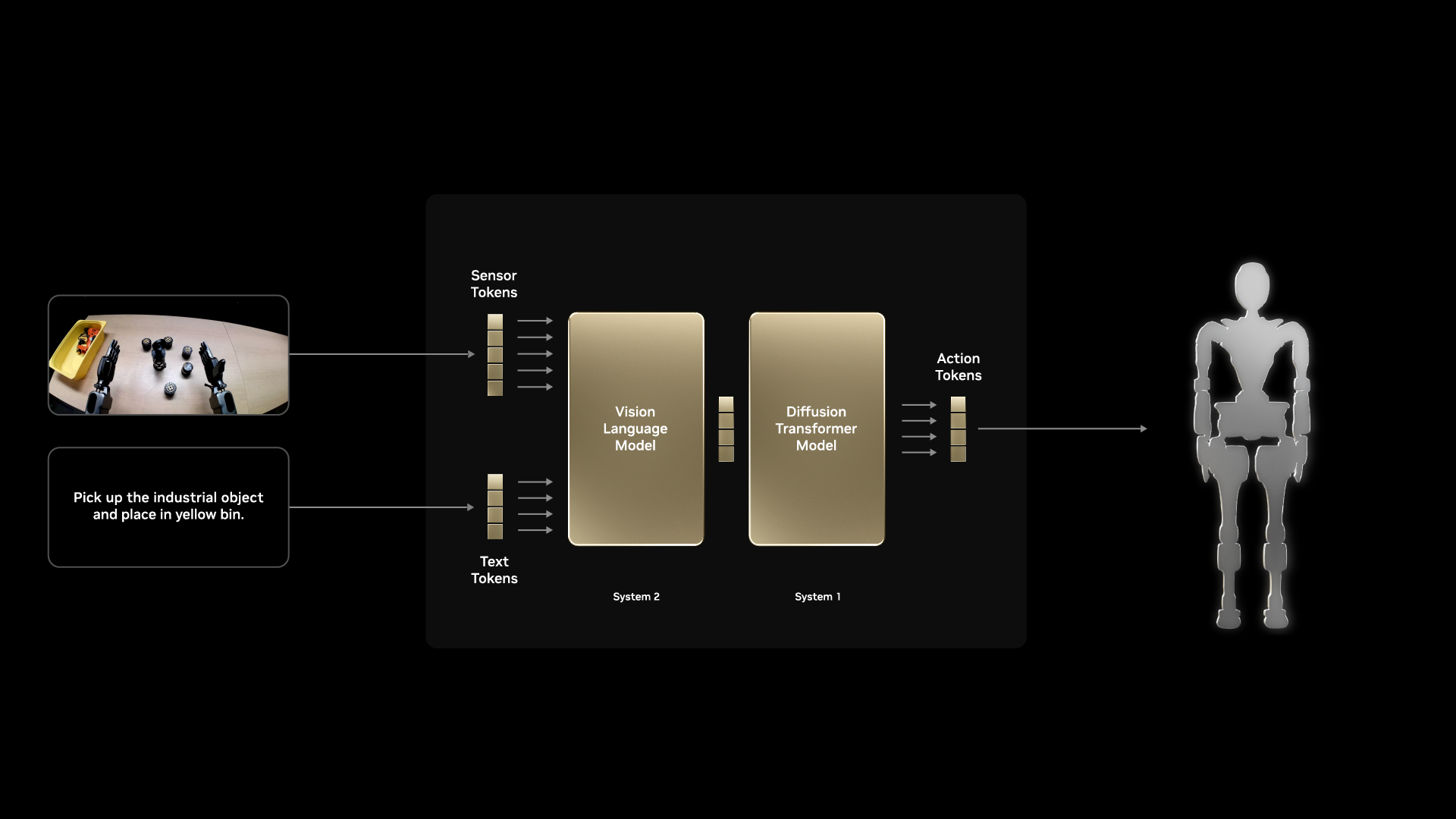
圖1 NVIDIA Isaac GR00T N1模型為雙架構設計(圖片來源:NVIDIA)
註1:GTC 2025大會上宣佈Agility Robotics、Boston Dynamics、Mentee Robotics及NEURA Robotics等廠商將採用GR00T N1模型。
只有基礎模型是不夠的,機器人在真實世界會碰到各種場景、情境,在開發過程中如果全程使用試製機器人與真實場景其實是很費錢費時的,如果可以用模擬(Simulate,嚴格而論該稱為推演)方式來開發就便利許多,省時省力省錢。
所以NVIDIA強調Omniverse可以把實體場景轉換成虛擬世界的3D場景,直接在電腦中模擬,但這還不夠,有些物件現實中不存在不夠好不夠多(例如預算限制只夠買5個實體欄杆,但期望模擬的場景需要10個),直接在虛擬世界打造即可,那就可以用上Cosmo軟體來虛構。
另外,實際的機器人可能也還沒打造出來,或在實際試煉時撞壞了等待修復,乾脆也在虛擬世界模擬出來使用,以便各種訓練、推演等試煉能持續。
有了實際場景複製、虛構物件打造後,就要正式進入模擬推演,所以需要有模擬器軟體,在模擬器內讓物件移動、物件與場景碰撞、物件與物件碰撞等,從而觀察其行為以便後續調整,而這樣的模擬器有許多套,如NVIDIA的Isaac Lab框架中的Isaac Lab或是MuJoCo Playground(開放源碼)等。
Newton
只有模擬器軟體還是不夠,在模擬器內還需要有物理引擎軟體,這一塊NVIDIA與迪士尼(昔稱迪斯耐)的研究部門(Disney Research)、Google的DeepMind等合作開發出名為牛頓(Newton)的物理引擎,用該引擎與模擬器搭配使用。Newton不僅可以支援Isaac Lab與MuJoCo Playground,後續也不排除支援更多其他的模擬軟體。
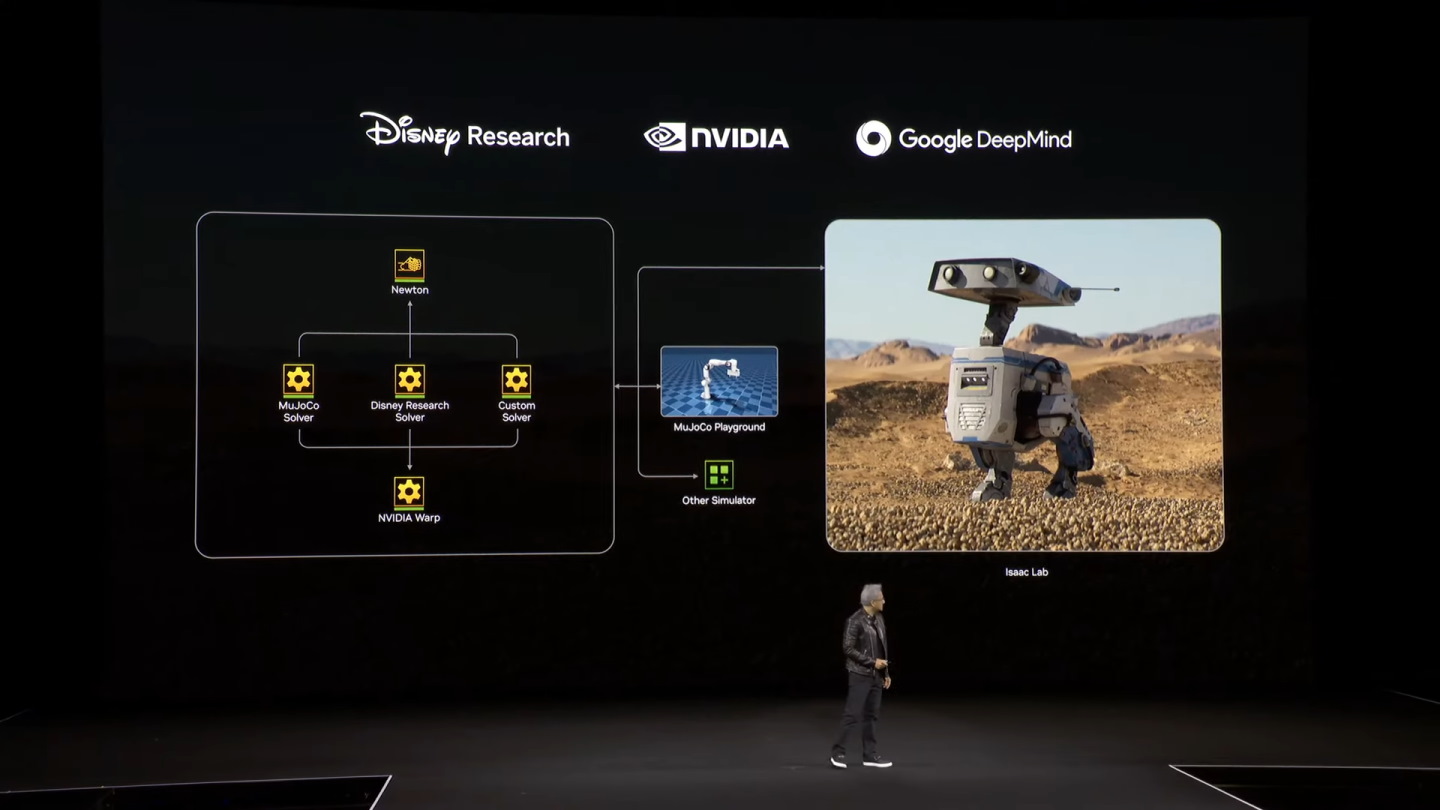
圖2 GTC 2025年會期間Newton物理引擎示意圖
另外,Newton可以搭配不同的求解器(Solver),可以是MuJuCo的求解器,也可以是Disney Research的求解器,或之後各種其他客製的求解器等,透過求解器可以表現各種物理特性,如物體的運動、碰撞、摩擦、重力、反作用力等。
不過Newton也不是從無到有打造,其基礎來自於NVIDIA Warp框架,以此為基礎延伸開發成。
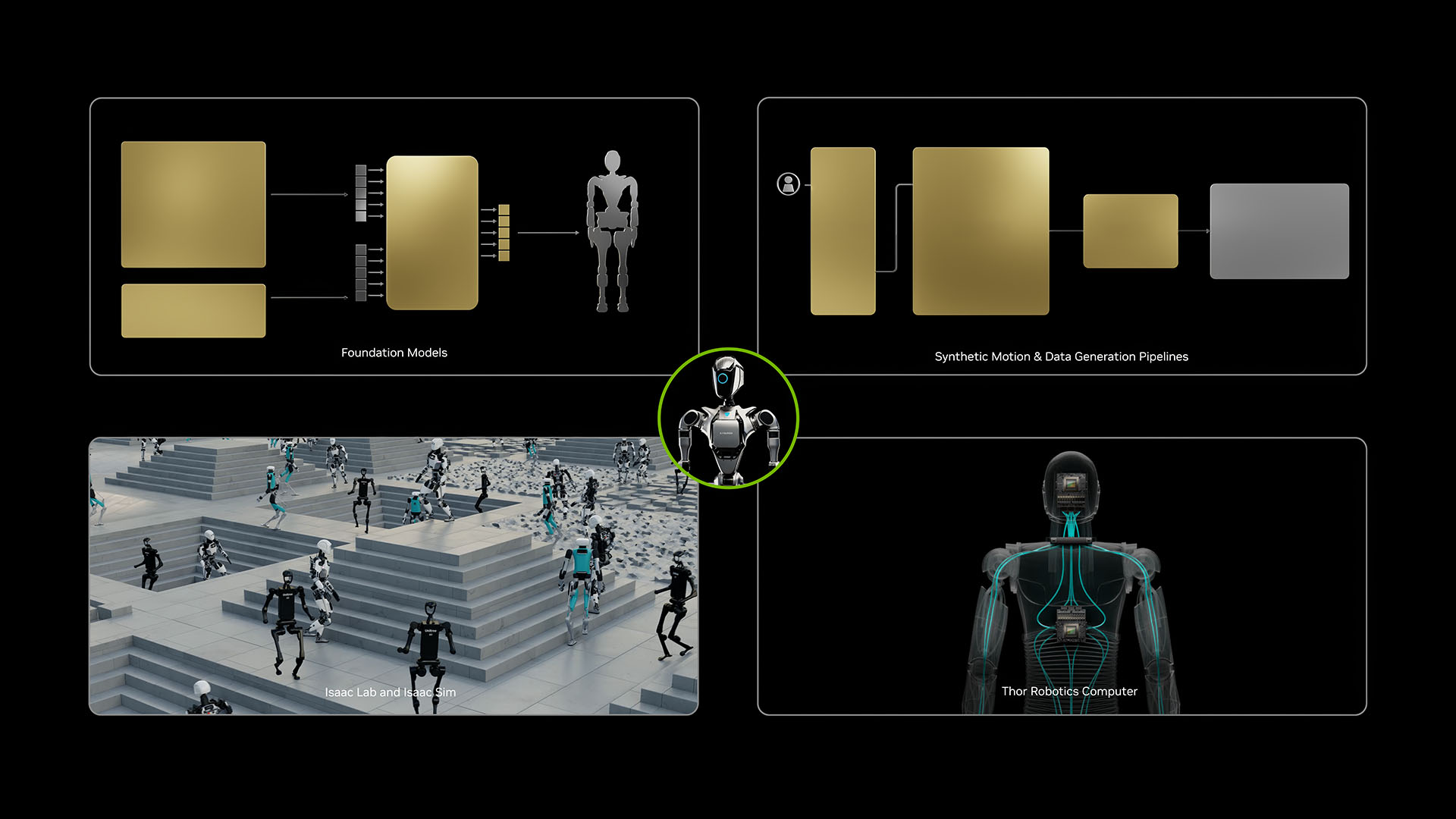
圖3 NVIDIA在GR00T官方網頁放置的圖,左上指GR00T N1、右上指Omniverse、Cosmo等,左下指Isaac Sim、Newton等,右下就是最終產出的實體機器人與電腦(圖片來源:NVIDIA)
BDX Blue
以上這些都是在虛擬環境中模擬機器人運動、反應所需的軟體環境,但可能要有一個實際演練項目為試煉目標,如此各種環境才能獲得反應意見,環境才能持續改善提升與擴充,而這個試煉項就是Disney的雙足機器人BDX(或稱BDX droid),這是Disney期望用於其遊樂園內與遊客互動的娛樂機器人。
BDX其實2023年10月就初次公開揭露,去年GTC 2024期間也出場亮相,當時為Green、Orange兩隻,GTC 2025年則有一隻Blue,很明顯前面提到的GR00T N1基礎模型、Omniverse、Cosmo、Isaac Lab、NVIDIA Warp、Newton等軟體以及Jetson AGX Thor硬體都會用於BDX上。

圖4 GTC 2025大會上NVIDIA創辦人兼執行長黃仁勳(左)與BDX Blue(右)
透過各種演練與調整後,未來正式上路在遊樂園內的BDX就可以到處正常步行,懂得避障禮讓人、懂得與人樂趣互動,若有不經意的推碰也能維持平衡等。
有了這套典範後,未來其他廠商想開發自己人形機器人、機器狗、搬運車等也都可以適用,當然NVIDIA極力讓機器人軟體開發環境完善化,最終無非是希望賣出更多晶片與硬體,希望未來量產的機器人盡可能在內部使用Jetson系列。
小結
最後大家可能也想自己打造個類似BDX的可愛機器人,目前有創客發起GEDroid,宣稱只要400美元上下就能自己打造一隻類BDX的機器人,目前專案已經推進到第三版,屬於使用低成本伺服馬達版。

圖5 第三版的GEDroid(圖片來源:tommywu052於GitHub)
GEDroid核心使用樹莓派系統,相關機構件也已開放CAD圖可以用3D列印方式實現,不過畢竟系統效能、資源有限,目前不可能如真正BDX般智慧,算是過過乾癮嘍!
(責任編輯:謝嘉洵。)

- 小孩才選擇!Arduino VENTUNO Q全都要 - 2026/03/26
- 樹莓派也能「養龍蝦」! - 2026/03/24
- Windows PC上安裝PicoClaw最基礎實務 - 2026/03/03
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


