作者/圖片來源:CAVEDU 教育團隊
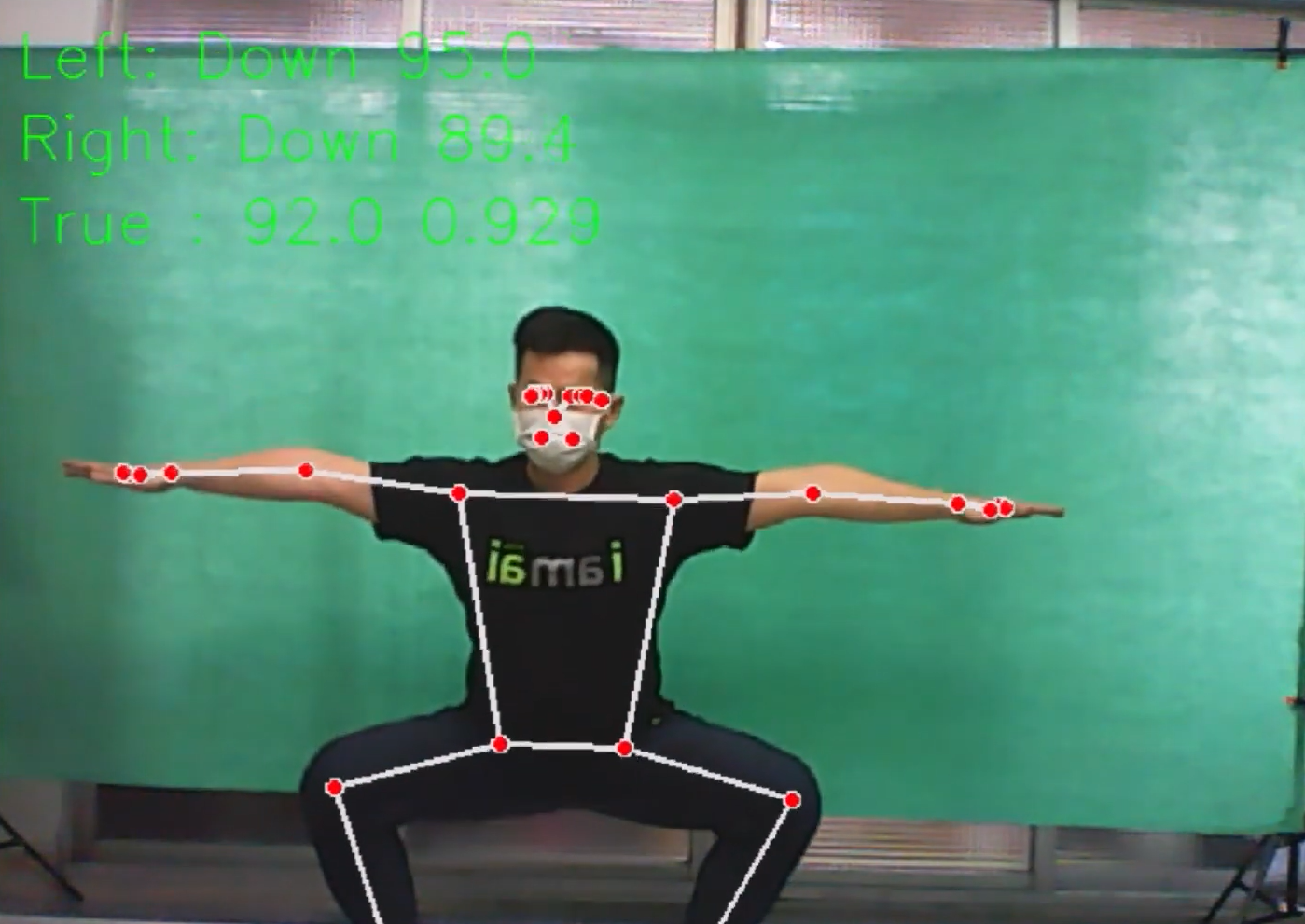
這次要做一個自虐的專題,偵測深蹲是否到位,其實是檢測大腿與小腿的夾角是否小於指定角度,看看怎樣使用 mediapipe 來做到喔!分成兩個版本:[Mediapipe 結合 Arduino 首次接觸就上手] 以及 [純 Mediapipe (超純)]。兩者差異在於 python 端會根據辨識結果發送訊號給 Arduino 首次接觸就上手,來看影片吧 (大家都要減肥了QQ)
想深入認識 Google Mediapipe 的朋友請點我看更多
Mediapipe 姿態偵測結合 Arduino 首次接觸就上手
以下是 mediapipe POSE api 的人體關節點定義,可看到兩腿的髖、膝與踝關節分別為 24 26 28 與 23 25 27。
![]()
請用以下指令安裝 mediapipe (python)
pip install mediapipe
如果執行本範例程式出現錯誤,請根據本文操作到圖 21。本文執行環境使用 Anaconda (python 3.7)
Python
使用 pose API 偵測兩腿夾角,想挑戰更高難度的話可以把角度調小一點(先不要謝謝)
Mediapipe squat detecting with Arduino Uno
import cv2
import mediapipe as mp
import numpy as np
import time
import json
import serial
cam = cv2.VideoCapture(0)
mppose = mp.solutions.pose
mpdraw = mp.solutions.drawing_utils
poses = mppose.Pose()
h = 0
w = 0
ser = serial.Serial("COM3", 9600)
start_time = 0
status = False
sport = {
"name": "Squat",
"count": 0,
"calories": 0
}
def logger(count, cals):
f = open("log.txt", 'a')
fs = f"{time.ctime()} count: {count} cals: {cals}\n"
f.write(fs)
f.close()
def calc_angles(a, b, c):
a = np.array(a)
b = np.array(b)
c = np.array(c)
radians = np.arctan2(c[1] - b[1], c[0] - b[0]) - \
np.arctan2(a[1] - b[1], a[0] - b[0])
angle = np.abs(radians * 180.0 / np.pi)
if angle > 180:
angle = 360 - angle
return angle
def get_landmark(landmarks, part_name):
return [
landmarks[mppose.PoseLandmark[part_name].value].x,
landmarks[mppose.PoseLandmark[part_name].value].y,
landmarks[mppose.PoseLandmark[part_name].value].z,
]
def get_visibility(landmarks):
if landmarks[mppose.PoseLandmark["RIGHT_HIP"].value].visibility < 0.8 or \
landmarks[mppose.PoseLandmark["LEFT_HIP"].value].visibility < 0.8: return False else: return True def get_body_ratio(landmarks): r_body = abs(landmarks[mppose.PoseLandmark["RIGHT_SHOULDER"].value].y - landmarks[mppose.PoseLandmark["RIGHT_HIP"].value].y) l_body = abs(landmarks[mppose.PoseLandmark["LEFT_SHOULDER"].value].y - landmarks[mppose.PoseLandmark["LEFT_HIP"].value].y) avg_body = (r_body + l_body) / 2 r_leg = abs(landmarks[mppose.PoseLandmark["RIGHT_HIP"].value].y - landmarks[mppose.PoseLandmark["RIGHT_ANKLE"].value].y) l_leg = abs(landmarks[mppose.PoseLandmark["LEFT_HIP"].value].y - landmarks[mppose.PoseLandmark["LEFT_ANKLE"].value].y) if r_leg > l_leg:
return r_leg / avg_body
else:
return l_leg / avg_body
def get_knee_angle(landmarks):
r_hip = get_landmark(landmarks, "RIGHT_HIP")
l_hip = get_landmark(landmarks, "LEFT_HIP")
r_knee = get_landmark(landmarks, "RIGHT_KNEE")
l_knee = get_landmark(landmarks, "LEFT_KNEE")
r_ankle = get_landmark(landmarks, "RIGHT_ANKLE")
l_ankle = get_landmark(landmarks, "LEFT_ANKLE")
r_angle = calc_angles(r_hip, r_knee, r_ankle)
l_angle = calc_angles(l_hip, l_knee, l_ankle)
m_hip = (r_hip + l_hip)
m_hip = [x / 2 for x in m_hip]
m_knee = (r_knee + l_knee)
m_knee = [x / 2 for x in m_knee]
m_ankle = (r_ankle + l_ankle)
m_ankle = [x / 2 for x in m_ankle]
mid_angle = calc_angles(m_hip, m_knee, m_ankle)
return [r_angle, l_angle, mid_angle]
def main():
global h, w, start_time, status
flag = False
if not cam.isOpened():
print("Camera not open")
exit()
try:
f = open("sport_recorder.json", "r")
prevdata = json.load(f)
if sport['name'] == prevdata['name']:
sport['count'] = prevdata['count']
sport['calories'] = prevdata['calories']
print("Read Success!")
f.close()
except:
print("Read Error...")
pass
tmp = f"a{sport['count']}\n"
ser.write(str.encode(tmp))
tmp = f"b{sport['calories']}\n"
ser.write(str.encode(tmp))
cv2.namedWindow('frame', cv2.WINDOW_FREERATIO)
while not flag:
ret, frame = cam.read()
if not ret:
print("Read Error")
break
frame = cv2.flip(frame, 1)
rgbframe = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
poseoutput = poses.process(rgbframe)
h, w, _ = frame.shape
preview = frame.copy()
if poseoutput.pose_landmarks:
mpdraw.draw_landmarks(preview, poseoutput.pose_landmarks, mppose.POSE_CONNECTIONS)
knee_angles = get_knee_angle(poseoutput.pose_landmarks.landmark)
body_ratio = get_body_ratio(poseoutput.pose_landmarks.landmark)
if knee_angles[0] < 120:
cv2.putText(preview, "Left: Down {:.1f}".format(knee_angles[0]), (10, 40)
, cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 1, cv2.LINE_AA
)
elif knee_angles[0] < 130:
cv2.putText(preview, "Left: ??? {:.1f}".format(knee_angles[0]), (10, 40)
, cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 255), 1, cv2.LINE_AA
)
else:
cv2.putText(preview, "Left: Up {:.1f}".format(knee_angles[0]), (10, 40)
, cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 1, cv2.LINE_AA
)
if knee_angles[1] < 120:
cv2.putText(preview, "Right: Down {:.1f}".format(knee_angles[1]), (10, 80)
, cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 1, cv2.LINE_AA
)
elif knee_angles[1] < 130: cv2.putText(preview, "Right: ??? {:.1f}".format(knee_angles[1]), (10, 80) , cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 255), 1, cv2.LINE_AA ) else: cv2.putText(preview, "Right: Up {:.1f}".format(knee_angles[1]), (10, 80) , cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 1, cv2.LINE_AA ) avg_angle = (knee_angles[0] + knee_angles[1]) // 2 # determine the status if status: if avg_angle > 160:
status = False
pass_time = time.time() - start_time
start_time = 0
if 3000 > pass_time > 3:
sport['count'] = sport['count'] + 1
sport['calories'] = sport['calories'] + int(0.66 * pass_time)
logger(sport['count'], sport['calories'])
tmp = f"a{sport['count']}\n"
ser.write(str.encode(tmp))
tmp = f"b{sport['calories']}\n"
ser.write(str.encode(tmp))
else:
if avg_angle < 120 and body_ratio < 1.2: start_time = time.time() status = True # print(f"status:{status} {start_time}") if status: cv2.putText(preview, f"{status} : {avg_angle:.1f} {body_ratio:.3f}", (10, 120) , cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 1, cv2.LINE_AA ) if time.time() - start_time > 3:
ser.write(b'command_2\n')
else:
ser.write(b'command_1\n')
else:
cv2.putText(preview, f"{status} : {avg_angle:.1f} {body_ratio:.3f}", (10, 120)
, cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 1, cv2.LINE_AA
)
ser.write(b'command_4\n')
else:
ser.write(b'command_4\n')
start_time = 0
cv2.imshow('frame', preview)
if cv2.waitKey(1) & 0xFF == ord('q'):
flag = True
f = open("sport_recorder.json", "w+")
f.write(json.dumps(sport))
f.close()
# release camera
cam.release()
cv2.destroyAllWindows()
if __name__ == '__main__':
main()
Arduino ino
接收來自於PC端的 python程式,並執行對應的LED、蜂鳴器動作:
arduino receive command from PC (python serial)
//Arduino首次接觸就上手
//Google Mediapipe - POSE api
//example: https://cavedu.gitbook.io/cavedu/hangeekduino
#define LED_1_pin 4 //板子上有
#define LED_2_pin 9 //需另外接
#define AUDIO_pin 5 //板子上有
int counter = 0;
int calories = 0;
bool stat = false;
bool breaker = false;
String str;
void setup(void)
{
Serial.begin(9600);
// init pin states
pinMode(LED_1_pin, OUTPUT);
digitalWrite(LED_1_pin, LOW);
pinMode(LED_2_pin, OUTPUT);
digitalWrite(LED_2_pin, LOW);
}
void loop(void)
{
int i;
if (Serial.available()) {
// 讀取傳入的字串直到"\n"結尾
str = Serial.readStringUntil('\n');
if (str.startsWith("a")) {
str.remove(0, 1);
counter = str.toInt();
}
else if (str.startsWith("b")) {
str.remove(0, 1);
calories = str.toInt();
}
else if (str == "command_1") {
if (!stat) {
tone(AUDIO_pin, 110, 100);
delay(100);
tone(AUDIO_pin, 165, 100);
}
stat = true;
digitalWrite(LED_1_pin, HIGH);
digitalWrite(LED_2_pin, LOW);
}
else if (str == "command_2") {
digitalWrite(LED_1_pin, HIGH);
digitalWrite(LED_2_pin, HIGH);
if (!breaker) {
tone(AUDIO_pin, 200, 100);
delay(100);
tone(AUDIO_pin, 200, 100);
breaker = true;
}
}
else if (str == "command_4" ) {
if (stat) {
tone(AUDIO_pin, 165, 100);
delay(100);
tone(AUDIO_pin, 110, 100);
}
stat = false;
breaker = false;
digitalWrite(LED_1_pin, LOW);
digitalWrite(LED_2_pin, LOW);
}
}
}
純 Mediapipe 版本
可以看出就是取消 serial 相關的程式碼而已,歡迎您也一起來做做看喔!
import cv2
import mediapipe as mp
import numpy as np
import time
import json
#import serial
cam = cv2.VideoCapture(0)
mppose = mp.solutions.pose
mpdraw = mp.solutions.drawing_utils
poses = mppose.Pose()
h = 0
w = 0
#ser = serial.Serial("COM3", 9600)
start_time = 0
status = False
sport = {
"name": "Squat",
"count": 0,
"calories": 0
}
def logger(count, cals):
f = open("log.txt", 'a')
fs = f"{time.ctime()} count: {count} cals: {cals}\n"
f.write(fs)
f.close()
def calc_angles(a, b, c):
a = np.array(a)
b = np.array(b)
c = np.array(c)
radians = np.arctan2(c[1] - b[1], c[0] - b[0]) - \
np.arctan2(a[1] - b[1], a[0] - b[0])
angle = np.abs(radians * 180.0 / np.pi)
if angle > 180:
angle = 360 - angle
return angle
def get_landmark(landmarks, part_name):
return [
landmarks[mppose.PoseLandmark[part_name].value].x,
landmarks[mppose.PoseLandmark[part_name].value].y,
landmarks[mppose.PoseLandmark[part_name].value].z,
]
def get_visibility(landmarks):
if landmarks[mppose.PoseLandmark["RIGHT_HIP"].value].visibility < 0.8 or \
landmarks[mppose.PoseLandmark["LEFT_HIP"].value].visibility < 0.8: return False else: return True def get_body_ratio(landmarks): r_body = abs(landmarks[mppose.PoseLandmark["RIGHT_SHOULDER"].value].y - landmarks[mppose.PoseLandmark["RIGHT_HIP"].value].y) l_body = abs(landmarks[mppose.PoseLandmark["LEFT_SHOULDER"].value].y - landmarks[mppose.PoseLandmark["LEFT_HIP"].value].y) avg_body = (r_body + l_body) / 2 r_leg = abs(landmarks[mppose.PoseLandmark["RIGHT_HIP"].value].y - landmarks[mppose.PoseLandmark["RIGHT_ANKLE"].value].y) l_leg = abs(landmarks[mppose.PoseLandmark["LEFT_HIP"].value].y - landmarks[mppose.PoseLandmark["LEFT_ANKLE"].value].y) if r_leg > l_leg:
return r_leg / avg_body
else:
return l_leg / avg_body
def get_knee_angle(landmarks):
r_hip = get_landmark(landmarks, "RIGHT_HIP")
l_hip = get_landmark(landmarks, "LEFT_HIP")
r_knee = get_landmark(landmarks, "RIGHT_KNEE")
l_knee = get_landmark(landmarks, "LEFT_KNEE")
r_ankle = get_landmark(landmarks, "RIGHT_ANKLE")
l_ankle = get_landmark(landmarks, "LEFT_ANKLE")
r_angle = calc_angles(r_hip, r_knee, r_ankle)
l_angle = calc_angles(l_hip, l_knee, l_ankle)
m_hip = (r_hip + l_hip)
m_hip = [x / 2 for x in m_hip]
m_knee = (r_knee + l_knee)
m_knee = [x / 2 for x in m_knee]
m_ankle = (r_ankle + l_ankle)
m_ankle = [x / 2 for x in m_ankle]
mid_angle = calc_angles(m_hip, m_knee, m_ankle)
return [r_angle, l_angle, mid_angle]
def main():
global h, w, start_time, status
flag = False
if not cam.isOpened():
print("Camera not open")
exit()
try:
f = open("sport_recorder.json", "r")
prevdata = json.load(f)
if sport['name'] == prevdata['name']:
sport['count'] = prevdata['count']
sport['calories'] = prevdata['calories']
print("Read Success!")
f.close()
except:
print("Read Error...")
pass
tmp = f"a{sport['count']}\n"
#ser.write(str.encode(tmp))
tmp = f"b{sport['calories']}\n"
#ser.write(str.encode(tmp))
cv2.namedWindow('frame', cv2.WINDOW_FREERATIO)
while not flag:
ret, frame = cam.read()
if not ret:
print("Read Error")
break
frame = cv2.flip(frame, 1)
rgbframe = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
poseoutput = poses.process(rgbframe)
h, w, _ = frame.shape
preview = frame.copy()
if poseoutput.pose_landmarks:
mpdraw.draw_landmarks(preview, poseoutput.pose_landmarks, mppose.POSE_CONNECTIONS)
knee_angles = get_knee_angle(poseoutput.pose_landmarks.landmark)
body_ratio = get_body_ratio(poseoutput.pose_landmarks.landmark)
if knee_angles[0] < 120:
cv2.putText(preview, "Left: Down {:.1f}".format(knee_angles[0]), (10, 40)
, cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 1, cv2.LINE_AA
)
elif knee_angles[0] < 130:
cv2.putText(preview, "Left: ??? {:.1f}".format(knee_angles[0]), (10, 40)
, cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 255), 1, cv2.LINE_AA
)
else:
cv2.putText(preview, "Left: Up {:.1f}".format(knee_angles[0]), (10, 40)
, cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 1, cv2.LINE_AA
)
if knee_angles[1] < 120:
cv2.putText(preview, "Right: Down {:.1f}".format(knee_angles[1]), (10, 80)
, cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 1, cv2.LINE_AA
)
elif knee_angles[1] < 130: cv2.putText(preview, "Right: ??? {:.1f}".format(knee_angles[1]), (10, 80) , cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 255), 1, cv2.LINE_AA ) else: cv2.putText(preview, "Right: Up {:.1f}".format(knee_angles[1]), (10, 80) , cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 1, cv2.LINE_AA ) avg_angle = (knee_angles[0] + knee_angles[1]) // 2 # determine the status if status: if avg_angle > 160:
status = False
pass_time = time.time() - start_time
start_time = 0
if 3000 > pass_time > 3:
sport['count'] = sport['count'] + 1
sport['calories'] = sport['calories'] + int(0.66 * pass_time)
logger(sport['count'], sport['calories'])
tmp = f"a{sport['count']}\n"
#ser.write(str.encode(tmp))
tmp = f"b{sport['calories']}\n"
#ser.write(str.encode(tmp))
else:
if avg_angle < 120 and body_ratio < 1.2: start_time = time.time() status = True # print(f"status:{status} {start_time}") if status: cv2.putText(preview, f"{status} : {avg_angle:.1f} {body_ratio:.3f}", (10, 120) , cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 1, cv2.LINE_AA ) #if time.time() - start_time > 3:
#ser.write(b'command_2\n')
#else:
#ser.write(b'command_1\n')
else:
cv2.putText(preview, f"{status} : {avg_angle:.1f} {body_ratio:.3f}", (10, 120)
, cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 1, cv2.LINE_AA
)
#ser.write(b'command_4\n')
else:
#ser.write(b'command_4\n')
start_time = 0
cv2.imshow('frame', preview)
if cv2.waitKey(1) & 0xFF == ord('q'):
flag = True
f = open("sport_recorder.json", "w+")
f.write(json.dumps(sport))
f.close()
# release camera
cam.release()
cv2.destroyAllWindows()
if __name__ == '__main__':
main()

CAVEDU 教育團隊是由一群對教育充滿熱情的大孩子所組成的機器人科學教育團隊。致力推動國內機器人教育。
Latest posts by CAVEDU 教育團隊 (see all)
- 【CAVEDU講堂】micro:bit V2使用TCS34725顏色感測器模組方法 - 2025/06/27
- 【CAVEDU講堂】NVIDIA Jetson AI Lab 大解密!範例與系統需求介紹 - 2024/10/08
- 【CAVEDU講堂】Google DeepMind使用大語言模型LLM提示詞來產生你的機器人操作程式碼 - 2024/07/30
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!
-140x94.jpg)

