作者:Bird
由於最近在一些 Arduino 和 Maker 社群中看到關於 GPS 接收模組使用的問題與討論,因此接下來幾次的篇幅我想來聊聊 GPS 原理、它提供的服務和功能、接收器原理/應用和限制等主題。
GPS 的組成
很多人都應該聽過,GPS 是由美國國防部打到天空中的二十幾顆衛星所構成。精確一點來說,第一批正式運作的 GPS 衛星是在 90 年代陸續打上去的,總共有 21+3 顆衛星:21 顆工作衛星及 3 顆備援衛星。
最早 GPS 的軌道設計是將 24 顆衛星分配在 6 個軌道上,每個軌道是一個與赤道夾角呈 55 度的圓形軌道,距離地球表面約 2 萬公里。如果我們利用麥卡托投影把世界地圖攤平,再把 GPS 衛星的軌道投影到世界地圖上,就會看到跟赤道呈 55 度角相交的直線:

(圖片來源:Bird 提供)
像這樣的投影直線總共有 6 條,分別對應到 GPS 衛星分布的 6 個軌道,軌道與軌道間在赤道上相距 60 度,平均分布。不過,軌道在地面的投影只有在中低緯度地區才是直線,到了高緯度地區由於投影誤差的關係,軌道會變成圓弧形的,而且由於 GPS 的軌道面與赤道有 55 度的夾角,沒有一個軌道會通過南北極,因此 GPS 衛星最北或最南就只會飛越南北緯約 55 度的地區,不會再更北或是更南。
但所謂「飛越」,指的是衛星可以出現在投影位置的正上方,也就是天頂。GPS 衛星雖然不會直接出現在高緯度地區的天頂,但由於它與地表的距離有 2 萬公里左右,在更北或是更南的地區仍然看得到進入高緯度地區的衛星,只是仰角沒那麼高而已。
現在有很多 App 或是網站可以幫我們計算、模擬 GPS 衛星的位置,像下面這張圖:
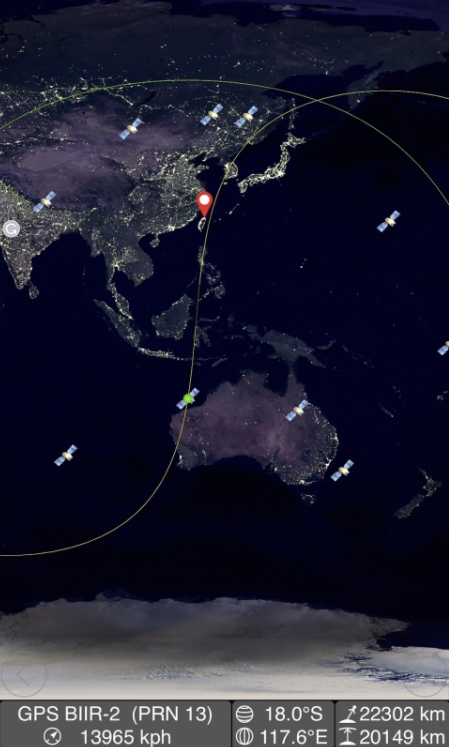
(圖片來源:Bird 提供)
這是我在寫這篇文章時,用「GoSatWatch」這個 App 計算第 13 號 GPS 衛星的軌跡所畫出來的圖。這顆 GPS 衛星剛由北向南飛越台灣東部上空,現在快到澳洲上空了。這顆衛星的軌道高度是 20149 公里,而我們目前距離衛星的直線距離則是 22302 公里,至於衛星與地表的相對速度,則是驚人的時速 13965 公里。
可以看到,到了高緯度地區,它的投影軌道就開始轉彎,但實際上衛星的軌道仍是貨真價實的圓形,看起來會轉彎是因爲麥卡托投影法在高緯度地區的變形誤差所致。
如果我們將 GoSatWatch 的顯示模式切換到 earth view,就可以看到 GPS 衛星與地球的實際相對位置與軌道投影:
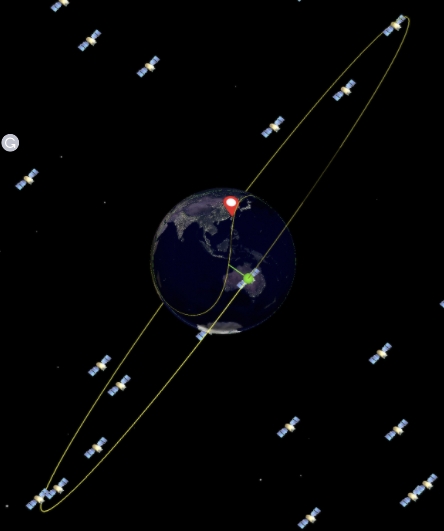
(圖片來源:Bird 提供)
從實際的相對位置圖可以看出來,爲什麼傾斜的軌道面會讓 GPS 衛星不會飛越南北極上空。這個圖是按比例畫的,因此圖中衛星與地表的距離就是 2 萬公里左右,加上地球的半徑後,實際的軌道半徑是 26000 公里左右。
由於 20000 公里相對於地球半徑來說算是個蠻遠的距離,因此 GPS 衛星能「看」到蠻大的地表,這也是爲什麼雖然 GPS 衛星沒有飛過極區,但仍然能爲高緯度地區提供服務的原因。
每顆 GPS 衛星繞行地球的時間是 11 小時 58 分,所以每顆衛星每天會繞行地球 2 次,而且隔天會比前一天早 4 分鐘從地平線升起。
GPS 衛星這麼複雜的軌道設計,全部只有一個目的:不管你在地球的哪一個角落,任何時候只要擡起頭,都可以見到至少 4 顆衛星。爲什麼是 4 顆?這跟 GPS 的定位原理有關,我們稍後會說明。
美國在 2011 年對 GPS 的衛星軌道做了一次重大的調整,稱爲「Expandable 24」,除了調整 6 顆衛星的位置,還多打了 3 顆衛星上去,讓 GPS 衛星總數達到 27 顆。事實上 GPS 衛星的擴充計劃是不斷在進行的,2011 年之後又陸陸續續有第二代、第三代的 GPS 衛星被送上軌道,並陸續讓舊的衛星退休,截至 2022 年 2 月爲止,目前共有 30 顆工作中的 GPS 衛星在軌道上,這還不包括已經退役、仍在軌道上飛行但沒有工作的衛星。
GPS 衛星的設計
目前在天空中飛的 GPS 衛星分成好幾代:
- Block IIA—這是最早的,1993 年開始陸續送上去的那一批衛星,由於壽命已盡,最後一顆在 2019 年除役。
- Block IIR—這是用來補充失效與退役的 Block IIA 衛星用的,那個「R」就是 replenishment(補充)的意思。這批衛星基本上設計跟 Block IIA 完全一樣,目前共有 7 顆在工作中。
- Block IIR-M—這是 Block IIR 衛星的「現代化」(modernized)版本。它多了一些新功能,像是新的抗干擾軍用定位訊號以及第二組民用定位訊號,目前也有 7 顆在工作中。
- Block IIF—配備新一代的原子鐘,更更準、更精確,是目前 GPS 衛星的主力機種,總共有 12 顆在天空中運作。這一代的衛星開始測試發射第三組精確度更高、更可靠的民用定位訊號,專門供民航使用。
- GPS III—最新的第三代 GPS 衛星,設計壽命更長、更可靠,除了有前面幾代全部的功能外,還開始測試發射第四組精確度更高、更可靠的民用定位訊號,目前只打了 4 顆衛星上去,陸續增加中。
每一顆 GPS 衛星大概像台小客車大小,重量也跟車子差不多,約 1600 公斤左右。
GPS 衛星上最重要的裝置就是它用來計時的原子鐘,以及將原子鐘訊號向地球發射的無線電系統和天線,除此之外當然還有太陽能板和電池用來發電、儲能,以便衛星進入太陽照不到的夜區時能繼續工作,GPS 衛星上也帶有小型的聯氨推進系統,用以修正軌道。
GPS 的無線電系統
早期的 GPS 在兩個波段上發射訊號:頻率爲 1575.42 MHz 的 L1 波段,以及頻率爲 1227.6 MHz 的 L2 波段。Block IIF 的衛星開始在第三個頻率爲 1176.45 MHz 的 L5 波段上發射訊號,但目前仍在測試階段。
以我們最常用的 L1 波段民用訊號來說,GPS 衛星上的 RF 發射功率規格是 25.6 W,而它的天線增益則是 13 dBi。衛星上通常會使用指向性很強的高增益天線,將絕大部分的 RF 功率都打向地球,GPS 衛星也不例外,因爲 GPS 並不是設計用來爲外星人提供導航服務,向其它方向發射訊號並沒有意義。
25.6 W 的 RF 功率配上 13 dBi 的天線,等效大概有 500 W 的 RF 功率,如果用 RF 常用的單位 dBm 來表示,就是 57 dBm。
衛星距離地表 20000 公里左右,這一段的衰減量大概是 182 dB,因此我們可以計算出 GPS 衛星發射的訊號經過了 20000 公里的旅程到達地表之後,剩下的功率:57(dBm)- 182 = -125(dBm);也就是說,在地球表面,你可以在 1575.42 MHz 這個頻率收到來自 GPS 衛星的無線電訊號,強度大約是 -125 dBm。
這是一個非常、非常、非常弱的訊號。
一般我們熟知的無線通訊系統如 Wi-Fi,至少要有 -80 dBm 到 -90 dBm 左右的訊號強度才能勉強運作,而手機等通訊距離較遠的無線通訊系統,大概至少也要有 -105 dBm 左右的訊號強度才能工作,而且此時的通訊速度已經非常非常慢。
-125 dBm 的訊號比 -105 dBm 的訊號還要微弱 100 倍,這個訊號要怎麼用呢?GPS 接收器是如何從這麼微弱的無線電訊號中取出有用的資訊、解碼、計算,提供導航服務呢?
小結
下一回,我們會繼續說明 GPS 利用什麼樣的通訊技術,將原子鐘產生的計時訊號送到 20000 公里之外的地表,並讓接收器可以解算出來。我們也會繼續說明爲什麼原子鐘是 GPS 上最重要的元件,以及 GPS 的定位原理。
(責任編輯:賴佩萱)

- 【Maker電子學】Flash 記憶體的原理與應用—PART22 - 2025/02/27
- 【Maker電子學】Flash 記憶體的原理與應用—PART21 - 2025/02/21
- 【Maker電子學】Flash 記憶體的原理與應用—PART20 - 2025/01/24
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!

