作者:Bird
上一回【Maker電子學】漫談電源系統的原理與設計—PART 5,我們談了 7805 用來比較電壓的比較器電路,以及用來產生參考電壓的 bandgap reference 電路,並說明了回授電路上的電阻分壓電路如何設定輸出電壓。
這一回我們要進入穩壓電源設計最迷路的部分:回授電路的穩定性。
回授系統的工作
我們上次說過線性穩壓 IC 的調控訊號來自內部的誤差放大器。誤差放大器會持續比較輸出電壓與參考電壓間的差異,將這個差異放大之後,送往一個積分電路,用以調控輸出電晶體的水龍頭大小。
當輸出電壓比參考電壓低時,調控電路的輸出就會逐漸增大;當輸出電壓比參考電壓高時,調控電路的輸出就會逐漸變小。不管調控電路的輸出是變大還是變小,直到輸出電壓跟參考電壓相等時,誤差放大器與積分電路就不再改變調控電路的輸出,輸出電壓就穩定在與參考電壓相等的地方了。
但這裡有一個問題:調控電路是一個監測輸出電壓並改變穩壓 IC 行爲的電路,它其實需要一點時間來工作。如果當它正在努力工作、改變控制訊號時,輸出電壓又因爲負載變化而改變了,該怎麼辦呢?它會去 「追」這個變化,並且很努力地試圖去追上這個變化。
但當變化太快、變化的時間太短,短到接近它每一次反應所需要的時間時,它除了有可能追不上之外,還有可能造成整個系統震盪起來。
很多人可能都有類似的經驗:如果我們的電腦正在忙、CPU loading 很高時,整個系統的反應會變得很慢。這時,你按下 Windows 的開始功能表時,它不會馬上有反應。等了一小段時間之後,你以爲你沒按到,於是又用滑鼠點了一下開始功能表,但就在你即將點到的那一瞬間,開始功能表突然跳出來了,原來之前那一下你其實有點到,只是因爲電腦太忙、反應太慢,因此來不及顯示出開始功能表。
但其實這一下是點在已經跳出來的開始功能表上,這麼一點又把開始功能表給點關掉了,但因爲電腦在忙,所以開始功能表其實不是馬上關掉,而是要等一下才關掉,當你會意過來你點的那一下其實是把它關掉時,又多點了一下想把它點開…如此周而復始,你一直想要照你的意思把開始功能表點開或關閉,但每一次點下去,它的動作都跟你想的剛好相反。
在各種回授控制系統中,也會遇到類似的問題。比方說系統現在的負載以 200 Hz 的頻率變大變小:
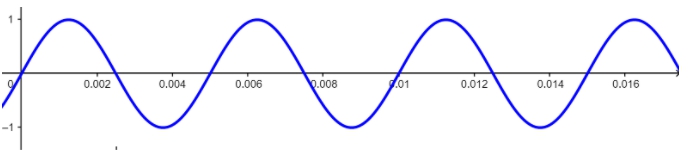
(圖片來源:Bird 提供)
這表示這個負載每 0.0025 秒就會變小、再下一個 0.0025 秒會變大;負載變小時,系統的電壓就會上升;當負載變大時,系統的電壓就會下降。
如果我們的回授電路剛好需要 0.0025 秒來處理系統的控制,也就是說當它偵測到輸出有變化時,需要花 0.0025 秒來產生控制的訊號,這時會發生什麼事呢?假設在 t=0 的時候,因爲負載變小,回授控制系統偵測到輸出電壓上升,因此它需要將控制訊號調小,讓輸出變小。
這個動作需要花費 0.0025 秒,因此在 t=0.0025 s 的時候,回授控制電路終於輸出了「調降」的控制訊號,但很不幸的是,由於這是一個一直在變化的負載,在 t=0.0025 s 時,負載變大了,因此系統的電壓就下降了。回授電路在電壓下降時輸出了一個讓輸出變小的控制訊號,進一步的讓輸出電壓變得更小。
回授電路的反應雖然慢,但它其實還是有時時刻刻在監控電壓,因此它發現系統的電壓太低了,又把輸出往增加的方向調整。這麼一調,又要花費 0.0025 秒來產生輸出訊號,因此在 t=0.005 s 的時候,回授控制系統終於輸出了「調大」的控制訊號,但一樣由於負載會持續變化,在 t=0.005 s 時,負載其實是變小、系統電壓是變高的,於是回授電路又再一次在系統電壓升高的那個 moment,輸出了「增加」的訊號,不但沒有往對的方向調整,還幫了倒忙,讓整個系統的電壓變得更高。
Phase Margin
這種現象稱之爲回授控制系統的「不穩定」,它很容易發生在當回授控制系統的反應速度很接近輸入變化的速度時,換句話說,就是回授系統的反應不夠快,而且最糟的情況會發生在我們上面舉的那個例子:回授控制系統的反應時間剛好是輸入訊號週期的一半時,整個回授系統會完全幫倒忙。
我們本來希望回授控制系統是把太大的變小、太小的變大,但在最糟的情況下,回授系統會把太大的變更大、太小的變更小。

(圖片來源:Bird 提供)
還記得嗎?我們上一回提過的電壓控制電路,它的輸入是接在比較器的負輸入,而參考電壓接在比較器的正輸入。這樣的回授電路稱為「負回授」電路,它的輸出會傾向讓過大的輸出變小、讓過小的輸出變大。
上面這張圖說明了輸入訊號於回授輸出之間的相位關係。理想的負回授系統,輸入訊號與輸出訊號之間要有 180 度的相位差,這樣產生的回授訊號可以剛好抵消輸入訊號的變化。
但就如前面的例子,世界上沒有真正「立即」的系統,回授系統需要時間來處理訊號、產生輸出,因此在輸入變化到它產生對應的輸出之間,會有一定程度的延遲。如果這個系統的延遲達到輸入訊號週期的 180 度,就會發生最壞的狀況:整個系統會從負回授系統變成正回授系統,而讓太小的訊號變更小、太大的訊號變更大。
當然在大部分的狀況下,事情並不會這麼糟。如果回授系統的反應速度比輸入訊號變化的速度快很多的話,反應延遲所造成的相位差就不會這麼大,一般來說,我們會以最糟的 180 度相位爲參考點,然後用 「距離 180 度還有多遠」來衡量一個回授系統的穩定性,這個「與 180 度的距離」稱之爲「phase margin」,就是一個回授系統與惡的距離…誒不是,是與「不穩定」的距離。設計上來說,phase margin 一定是越大越好,而如果小於 20 度,系統就很有可能發生不穩定。
如果系統的延遲是個固定的時間,那麼 phase margin 就會跟輸入訊號的頻率有關,頻率越高,phase margin 會越小,到了某個頻率以上之後,phase margin 太小、這個系統就會不穩定。
Loop Gain
除了 phase margin 之外,另外一個用來分析回授系統特性的參數稱之爲「loop gain」,它直接與誤差放大器的放大倍率有關。
我們上一回說過,誤差放大器的輸出電壓就是兩個輸入相減,再乘上一個放大倍率,而這個輸出電壓會去改變調控電路的輸出大小。誤差放大器的放大倍率越大,它的輸出就越大,對輸出的修正就越快。
基於一些很複雜的理由,loop gain 也和頻率有關,一般來說 loop gain 會隨著訊號的頻率上升而下降,當 loop gain 下降後,系統修正的速度會變慢;在 loop gain 較小的狀態下,即使 phase margin 足夠,回授系統也不一定能完全追上輸入訊號的變化。
穩壓 IC 的 loop gain 和 phase margin 通常不會寫在 datasheet 上,因爲除了 IC 本身的特性,外加的零件如輸入濾波電容、輸出濾波電容、回授分壓電阻網路的值等參數都會影響整個回授系統的特性,因此往往需要藉助一些 IC 供應商提供的模擬工具如 TI 的 WEBENCH 等,才能量到穩壓 IC 在特定週邊零件與工作條件下的 phase margin 與 loop gain 等。
事實上關於 loop gain、phase margin 這些參數與穩壓系統的穩定性分析,在一門稱之爲「控制系統」的領域中有非常完整的數學工具,可以用來計算、分析,但這已經超出本專欄的範圍太遠太遠了,我也不希望在這裡用太多的數學嚇跑讀者,因此關於回授系統的穩定性,我們就儘量用文字做定性的說明就好了。關於定量的計算,就留給有興趣的讀者自行深入探討。
小結
這回我們談了穩壓 IC 中,回授控制電路的穩定性,並且說明了 phase margin 和 loop gain 這兩個用來衡量、分析回授電路的參數。
下一回我們要來看一些實際的線性穩壓 IC 電路設計,將我們這幾次所學到的知識做個總結。
(責任編輯:賴佩萱)

- 【Maker電子學】Flash 記憶體的原理與應用—PART22 - 2025/02/27
- 【Maker電子學】Flash 記憶體的原理與應用—PART21 - 2025/02/21
- 【Maker電子學】Flash 記憶體的原理與應用—PART20 - 2025/01/24
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!

2021/08/12
Hi Bird,
我對phase margin and loop gain已經迷路很久了, 感謝你的文章, 深入淺出, 很容易懂, 說真的我到今天才了解這兩個特性參數的意義, 謝謝!!
2021/08/12
Hi Bird,
phase margin 就會跟輸入訊號的頻率有關,頻率越高,phase margin 會越小,到了某個頻率以上之後,phase margin 太小、這個系統就會不穩定。
==> 輸入訊號的頻率是否就跟負載變化或輸入電壓變化的頻率成正相關?
2021/08/12
Hi Bird,
這種現象稱之爲回授控制系統的「不穩定」,它很容易發生在當回授控制系統的反應速度很接近輸”入”變化的速度時
==> 應該是很接近輸”出”變化的速度時, 對嗎?
2021/08/12
我懂了, 你這裡的輸”入”, 指的是比較電路的”負端的輸入”