作者:Bird
在一些機器人相關的機構專案中,我們常常會在某些程度上需要感測「力」的大小,但又不需要用到像秤重那樣精確的感測力量。這次我們要介紹一種可以用來感測「力量」的電子元件,它可以提供與力量相關的輸出,但沒有像電子秤所使用的感測器 load cell 那麼線性與精確,系統的複雜度與價格也比 load cell 低很多。
力感測電阻
這次我們要介紹的元件叫做「力感測電阻」 ,英文叫做 force-sensitive resistor,簡稱 FSR。我曾經看過有人將它稱之爲「壓敏電阻」,但這樣的稱呼其實不太正確,因爲 FSR 感測的是施加在它上面的「力」 的總和,而非施加在它上面的壓力。
根據物理上的定義,壓力是「單位面積上的力」,如果你可以在機構設計上確保對 FSR 施力的面積恆定,那麼力和壓力之間當然就會有固定的線性關係,但 FSR 本身感測的仍然是「力」 而非「壓力」 ,所以它叫做 force-sensitive resistor,而不是 pressure-sensitive resistor。
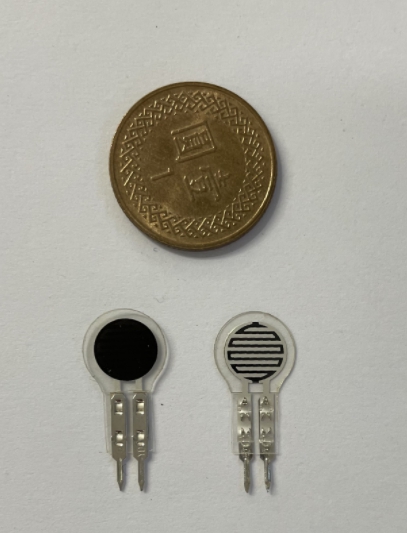
(圖片來源:Bird 提供)
上圖是典型的 FSR 元件外形,從一塊錢銅板的大小可以看出來這兩個零件其實很小。事實上 FSR 有各式各樣的大小和形狀,很多供應商也提供接受客製化的 FSR 外形訂製。
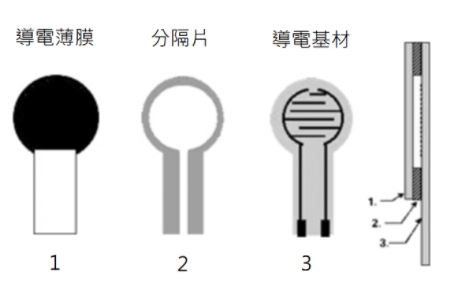
FSR 的原理與結構很簡單,它由三層結構組成:印有導電圖形的基材(substrate)、分隔片(spacer)、以及軟性導電薄膜(conductive film),如下圖:
(圖片來源:Bird 提供)
基材上印有密密麻麻的導電圖形,通常是兩組線路以很密集的方式纏繞在一起但是沒有互相接觸,而這兩組線路會各自連接到 FSR 的兩個接腳上。
從剖面圖上可以看得出來,當我們沒有對 FSR 施力時,他的導電基材和導電薄膜這兩層會被分隔片分開,沒有接觸,而基材上的兩組導電圖形電路也是分開的,因此這時 FSR 的兩隻腳之間是開路的,電阻無限大。
當我們對 FSR 施力時,上面的導電薄膜會受力變形,開始接觸到下方導電基材上的圖形,讓兩組線路之間導通。施加的力越大,導電薄膜的變形就越大,它與基材上的導電圖形接觸的面積也就越大,因此兩隻接腳之間的電阻就越小。
因此,我們可以說,FSR 的電阻與它所受的力呈負相關,受力越大,電阻越小;而 FSR 不受力時,則是開路的。
這裡要特別強調一件事:雖然 FSR 的電阻大小與它所受的力呈負相關,但力與電阻之間的關係在力量較小時並不是非常線性,而是比較接近反比的關係。
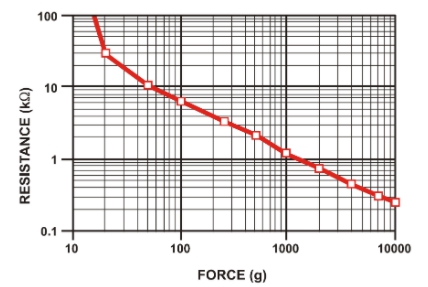
(圖片來源:Bird 提供)
上圖是一個典型的 FSR 特性圖,可以看出來它在受力十克以下時,電阻非常大,這就是 FSR 還不導通的區域;當力量到了十幾克時,FSR 的電阻會突然降到 100 Kohm 以下,這個力量我們稱之爲 FSR 的 「break force」,也就是讓 FSR 的導電薄膜變形到開始互相接觸的力量。
之後,隨著力量越來越大,FSR 的電阻就越來越小,直到某個力量以上,當薄膜已經被壓到幾乎完全接觸、無法再增加導通量時,我們就說這個 FSR「飽和」了。
選擇 FSR 零件時,除了機械尺寸外,最重要的規格是它的飽和受力。零件供應商可以藉由控制導電薄膜的硬度,決定它的變形量與受力的關係,進而改變上面那條線的斜率。
一個比較硬的 FSR,受力時的變形量比較小,因此可以感測比較大範圍的力量,它的飽和力也比較大;相對的,一個比較軟的 FSR,受力時的變形量比較大,對小的力量就很敏感,但很快就飽和。
FSR 的感測電路
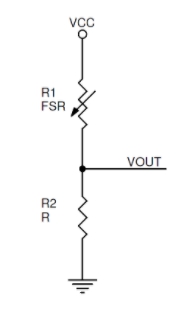
既然 FSR 的輸出是一個變動的電阻值,典型的測量方式就是利用一個電阻的分壓電路來將這個阻值的變化轉變成電壓:
(圖片來源:Bird 提供)
我們可以將 FSR 跟一個固定的電阻串在一起,變成一個分壓電路。這時 VOUT 的電壓就是:
VOUT = VCC * R2 / ( R1 + R2)
一般 FSR 可用的阻值範圍大概在 100 Kohm 到 0.2 Kohm 之間,我們必須根據這個阻值選擇 R2 的大小。假設我們選定 R2 = 1 Kohm,而 VCC 是 5 V,上面的式子就變成:
VOUT = 5 * 1000 / (R1 + 1000)
這種分壓電路最大的問題在於變數 R2 在分母項,它的電壓輸出與變數呈反比,因此電壓的輸出會是個雙曲線函數,而不是理想中的線性函數。我們把 R2 跟 VOUT 的關係畫成圖就很清楚了:
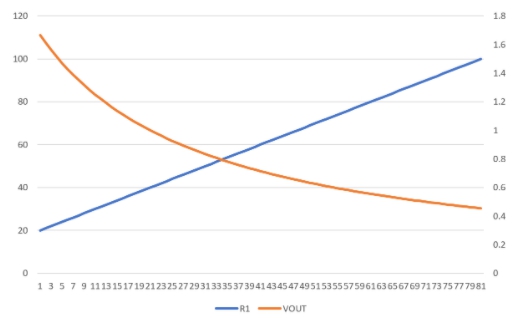
(圖片來源:Bird 提供)
由於雙曲線函數本身特性的關係,當 R1 很小時,VOUT 的變化量很大,但是當 R1 很大時,VOUT 的變化量就很小。因此即使 FSR 的輸出電阻與受力呈線性的關係,用分壓電路將電阻轉換成電壓時,仍然無法得到一個與受力呈線性關係的電壓。
分壓電路的另一個問題是,我們必須要藉由 R2 來限制流過 R1 的最大電流,因爲當 FSR 受力很大時,R1 會變的非常小,如果 R2 也很小的話,就會有很大的電流流過 R1 和 R2,導致 FSR 燒毀。
如果我們使用 FSR 只需要大致知道受力的大小,而對線性度與精確度要求不是很高,以上的分壓電路還堪用,但如果我們需要調整輸出電壓的斜率或 offset,以對應後方取樣電路的動態範圍,就需要另一個電路來幫忙了。
電流對電壓轉換電路
爲了要讓 FSR 輸出的電阻轉換成一個可以調整斜率和 offset 的電壓曲線,我們利用電流-電壓轉換的放大電路來幫忙:
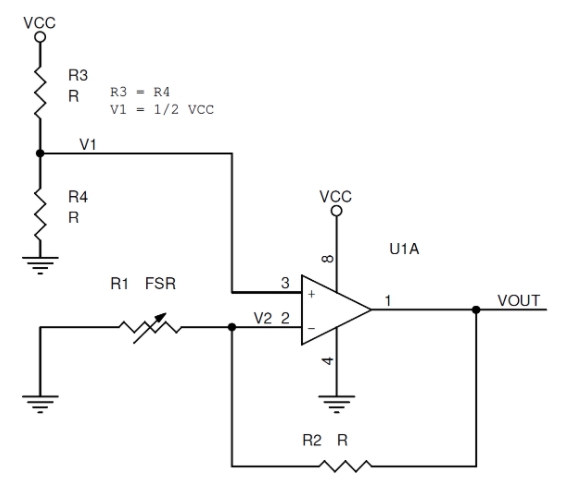
(圖片來源:Bird 提供)
上圖是一個很典型的電流對電壓的轉換電路。由於運算放大器的輸入阻抗極高,我們可以假設幾乎不會有電流流進運算放大器的負級,因此當 FSR 不受力、開路時,流過 R2 的電流爲 0,此時 VOUT 就等於運算放大器的正極輸入電壓 V1,也就是 1/2 VCC。
當 FSR 開始導通時,會有電流流過 R1,此時流過 R2 的電流就開始增加。由於還是不會有電流流入運算放大器,流經 FSR 的電流就等於流過 R2 的電流,而此時 V2 的電壓就會等於 VOUT 減掉 R2、乘上流經 R2 的電流。於是 VOUT 就從 1/2 VCC 開始往上增加,而增加的幅度則與流經 R2 的電流呈正比。
整理上面的推導,我們可以得到 VOUT 與 FSR 電阻的關係:
VOUT = V1 * (1 + R2 / R1) = 1/2 VCC * (1 + R2 / R1)
我們假設 VCC =5 V,R2 = 10 K,FSR 的變化範圍是 20 K 到 100 K,把 VOUT 畫成圖:
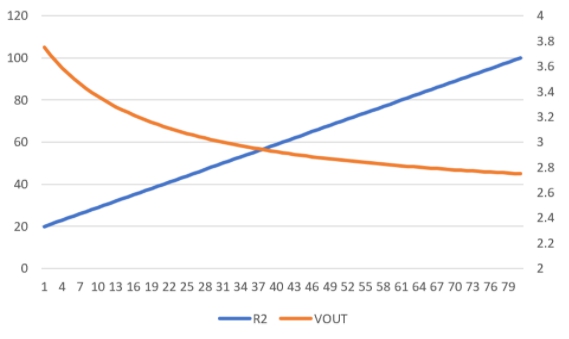
(圖片來源:Bird 提供)
上圖中可以看出,FSR 的電阻從 20 K 到 100 K 變化的這段區間,有一個較爲平直的電壓輸出,這是因為 FSR 的電阻與受力呈反比,而 VOUT 又與 R2 呈反比,因此 VOUT 大致上會與 FSR 所受的力呈正比。
藉由調整 R1 與參考電壓 V1 的大小,我們也可以調整 VOUT 輸出的斜率和 DC offset,將曲線調整到我們需要感測的範圍,這是單純使用分壓電路做不到的。
小結
這次我們介紹了一種簡單、便宜的力感測元件:力感測電阻 FSR。雖然它的輸出與受力的關係並不線性,但是藉由電路的設計,我們可以轉換 FSR 的輸出,讓其成爲一個較線性的電壓輸出,來做力測量。雖然 FSR 的精確度及線性度仍無法像 load cell 那麼精確,但在一些簡單的應用中,如果你只需要粗略感測力的大小,FSR 仍然不失爲一個好選擇。
(責任編輯:賴佩萱)

- 【Maker電子學】Flash 記憶體的原理與應用—PART22 - 2025/02/27
- 【Maker電子學】Flash 記憶體的原理與應用—PART21 - 2025/02/21
- 【Maker電子學】Flash 記憶體的原理與應用—PART20 - 2025/01/24
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


