作者:Bird
上一篇【Maker電子學】磁性感應元件的原理與應用我們聊了磁性感應元件的始祖:磁簧開關以及利用霍爾效應做成的固態磁性感應元件:霍爾開關;由於霍爾效應能感應磁場極性、強弱等連續變化的特性,因此其實除了「開關」外,它還有很多功用。
線性霍爾感測器
線性霍爾感測器(linear Hall-effect sensor)可以將磁場的特性轉變爲連續變化的電壓或其它類型的類比訊號,很適合拿來做磁場強度與距離的感應。以下我以 Micronas 的 HAL830 這顆線性霍爾感測器爲例來說明,它是一顆只有三隻腳的 IC,用的是長得像小型插腳電晶體的 TO-92 包裝,如下圖所示:
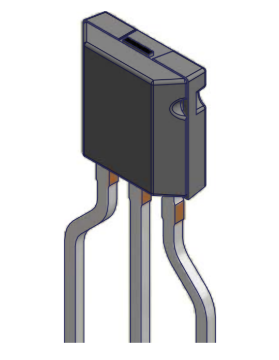
HAL830 只有三隻腳(圖片來源:Bird 提供)
HAL830 雖然只有三隻腳,但它裡面的功能非常複雜。HAL830 可以測量的磁場強度範圍爲 +/-30 mT 到 +/- 100 mT,看到有正負號就知道它對南磁極與北磁極都有反應,但事實上幾乎所有的霍爾效應感測器都可以測量雙向的磁極,因爲霍爾效應本來就對兩個磁極都會有反應,只是結果是反應在不同的霍爾電壓偏差上。
這種類比輸出的霍爾效應感測器,其輸出是一個正比於電源的電壓,「磁通量越大,電壓越高,磁通量越少,電壓越低」,而且由於磁通量是有正負號的,若霍爾感測器沒有感應到磁場時,則稱之爲輸出的「中點」(quiescent voltage)。
如果我們用 5 V 供電給 HAL830,把它的感側範圍設定爲 +/-100 mT,並把中點電壓設定在 1/2 電源電壓,就會的到這樣的輸入與輸出的關係:
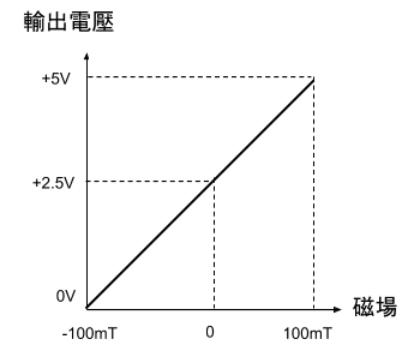
(圖片來源:Bird 提供)
它的感側範圍從 +/-30 mT 到 +/-150 mT 有五段可以設定,中點電壓也可以設定,因此你可以根據你要測量的磁場特性來設定 HAL830。舉例來說,如果你用一個磁鐵的南極對著 HAL830,並用磁通量來測量磁鐵與 HAL830 之間的距離,如下圖所示:
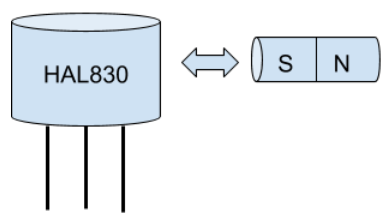
(圖片來源:Bird 提供)
在這樣的配置下,磁通量永遠會是正的,因此你可以把 HAL830 的中點電位設到很低甚至 0 V,充分利用它的動態範圍。當磁鐵的南極越靠近 HAL830,磁通量會越大,輸出電壓就會越高;當磁鐵離開 HAL830 越遠,磁通量越小,輸出電壓就會越低;當 HAL830 感應不到磁場,也就是 B=0mT 時,它的輸出電壓就會是你設定的中點電壓。
事實上 HAL830 內部還有很多很強大的功能可以設定,若要有以上這些功能或是溫度補償、最高與最低輸出限制、濾波器頻寬等,都可以透過寫入 HAL830 內部的 EEPROM 設定。
HAL830 只有三隻腳,當然不可能透過我們常用的 SPI 或 I2C 等界面來讀寫 EEPROM。寫入 HAL830 EEPROM 的方法主要是利用電源接腳上的電壓變化,並在這個變化上調變資料位元來與它通訊,這對大部分接腳很少的 IC 而言,是很常見的作法(詳細的通訊協定與寫入、讀取的方式在 HAL830 的 datasheet 上都有詳細的說明,有興趣的讀者可以參考)。
旋轉霍爾感測器
另外一種常見的霍爾效應感測器就是旋轉霍爾感測器(rotary Hall-effect sensor),又名霍爾角度感測器(Hall-effect angle sensor)。以下我以 Allegro 的一顆 A1333 霍爾角度感測器爲例說明,A1333 有 14 隻腳與 24 隻腳的 TSSOP 兩種封裝:
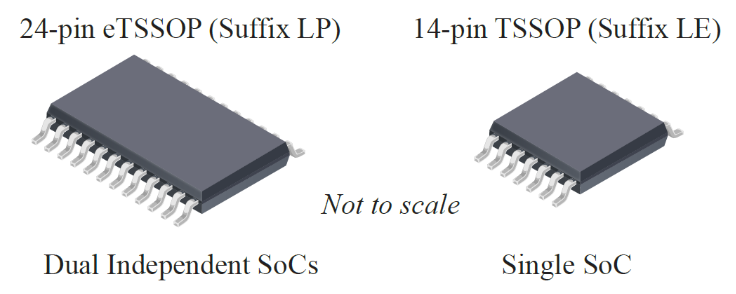
(圖片來源:Bird 提供)
兩者的差別在於 TSSOP24 的包裝裡面有兩顆一模一樣的 A1333 晶片(die)。由於這種霍爾感測器經常用在各種需要極高可靠度的設計中,因此通常會提供 dual-die 的封裝,當其中一顆故障時還有另外一個可以用,不過在系統設計時,大家必須要有這樣的考慮:控制器必須隨時監測感測器的有效性,當判斷其中一個 die 故障時,就僅使用來自另外一個 die 的輸出。
A1333 通常與圓形、對向充磁的磁鐵搭配使用,與磁鐵的相對位置通常是這樣安排:
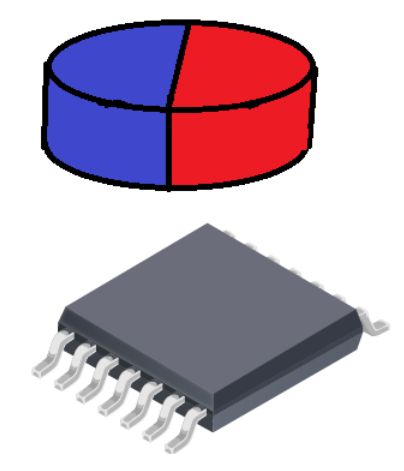
(圖片來源:Bird 提供)
由於磁力線永遠是由北磁極流向南磁極,這樣的配置會在 A1333 上方造出一個與磁鐵角度相關的磁力線流向,而 A1333 利用內部的圓形垂直霍爾感測器(circular vertical Hall sensor,CVH sensor)就可以感應這個磁場的方向,進而定出它在 360 圓周上的角度,因此像 A1333 這種旋轉式霍爾感側器,它的輸出就是一個絕對角度。
A1333 對磁場角度的變化非常敏感,磁場強度夠的時候(90 mT 以上),它可以有 12-bit 的精度,也就是說它可以把 360 度分成 4096 階的度數,每個 LSB 就會是 360 度 / 4096 = 0.08789 度,因此 A1333 如果與磁鐵搭配得好,可以做非常精密的角度測量,很適合應用在機器人、馬達控制等需要精確且快速角度測量的設計中。
A1333 有很多種不同的界面:PWM、90 度相角差編碼器(quadrature encoder)及 SPI 數位界面:
- PWM
PWM 是最簡單的應用界面,它直接用 PWM 的 duty cycle 0-100% 來代表 0-360 的角度,藉由測量每次的 duty cycle,就可以知道角度,但 PWM 輸出的缺點是速度較慢,A1333 的 PWM 載波頻率最高只能設定到 3.125 KHz,換句話說在 PWM 模式下最快每秒只能測量 3125 次角度,但事實上 A1333 的能力遠不止於此,它內部更新角度訊號的頻率可高達 1 MHz,因此對於需要快速角度測量的應用來說,PWM 界面並不合適。
- 90 度相角差編碼器
90 度相角差編碼器(quadrature encoder)又叫做 ABI 界面,這個名字是從它的訊號名稱來的,這個界面有三個訊號分別叫做 A、B、I,它就是模仿傳統旋轉編碼器的訊號格式,產生兩個相位相差 90 度的方波 A 及 B,以及一個每轉一圈就產生一次的 index 訊號。
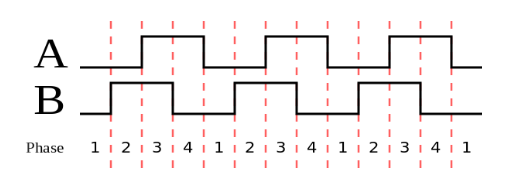
(圖片來源:Bird 提供)
A 和 B 兩個訊號都是增量編碼(increamental encoding),磁鐵每轉動一個特定的角度,A 和 B 都會產生一個脈波,藉由偵測這兩個訊號的相位差(超前或是落後),可以知道旋轉的方向及速度,但無法知道絕對角度(絕對角度需要靠 index 訊號在每一次轉過 0 度原點時歸零計算,因此 ABI 界面需要另外用一個計數器來數方波的個數,才能知道絕對角度)。
- SPI 數位界面
最強大的界面非 SPI 莫屬,SPI 是點子系統中很常用的數位資料傳輸界面,而且它的速度很快。以 A1333 的 SPI 來說,最快可以支援到 10 MHz 的 clock,其 frame 有 16-bit 和 20-bit 兩種模式,16-bit 是一般常見的 SPI 格式,而 20-bit 則是在 16-bit 的資料上再額外加上 4 個 bit 的 CRC 錯誤檢查碼,用以提高傳輸的可靠度;每一次讀取需要兩個 data frame,因此最快每秒可以讀取 10,000,000 /(16 * 2)= 312,500,雖然還趕不上它內部 1 MHz 的更新頻率,但也比 PWM 和 ABI 快多了。
霍爾效應電流感測器
一般傳統的直流電流感測方法是利用電流流過電阻時的壓降,造出一個微小的電壓差,再測量這個電壓來估算電流。這個方法非常簡單,但最大的缺點就是它會消耗能量,電阻上會有 P = I2R 的能量損耗,在被測電流大的時候,這個能量其實不可忽略,因此如果要降低這個損耗,就得用比較小的電阻來測量電流,但一來準確的低電阻元件不容易取得,二來電阻小的話壓降也小、訊號就弱,其實是個兩難的設計難題。
霍爾效應是利用磁場影響電流的原理產生電壓差來感應磁場,因此如果我們固定磁場,就能用霍爾電壓來偵測電流的大小;換句話說,由於霍爾電壓是因爲磁場產生的,因此在磁場中的導體可以儘可能做到低電阻,如此一來沒有功耗的問題,一樣可以測量電流。
我們以 Allegro 的 ACS72981 這顆霍爾效應電流感測器爲例來說明。ACS72981 是一整個系列的 IC,有各種不同的電流測量範圍,從 50 A 到 200 A 都有,還分成單向和雙向,所謂單向就是它的待測電流只能朝一個方向流動,而雙向就是它可以測量兩個方向的電流。
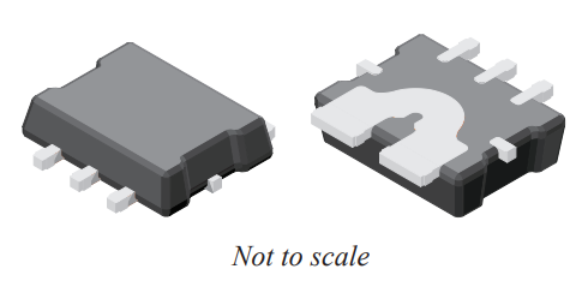
ACS72981(圖片來源:Bird 提供)
ACS72981 的封裝相當特別,它有兩隻很粗的接腳,就是讓待測電流流過的路徑。根據原廠的 datasheet,這兩隻腳如果妥善焊接的話,它的電阻可以低到 200 uohm,也就是 0.0002 ohm,就算流過 100 A 的電流,上面的功耗也不過:P = I2R = 100*100*0.0002 = 2 W,以規格書上這個封裝的熱阻 RθJA= 18 °C/W 來說,只會造成 36°C 的溫升,這樣的功耗是電阻式的電流測量方法很難做到的。
而 ACS72981 的輸出特性也很簡單,它就是一個正比於電流的電壓。以 ACS72981KLRATR–150B5 這顆 5 V 供電、可以測量 +/-150 A 的版本來說,因爲它可以測量雙向的電流,因此輸出的中點電壓在 1/2 VCC,也就是 2.5 V;換句話說,當被測電流是 0 時,ACS72981 的輸出電壓是 2.5 V,另外,這一顆的測量放大倍率是 13.33 mV/A,也就是說每 1 A 的電流會在輸出上產生 13.33 mV 的電壓。
如果流過正向 20 A 的電流,它的輸出就會是:(20 * 13.33 / 1000)+ 2.5 = 0.2666 + 2.5 = 2.7666(V);如果我們在輸出上測到一個 1 V 的電壓,流過的電流就會示:(1 – 2.5) / (13.33 / 1000)= -1.5 / 13.33 * 1000 = -112(A),也就是說這是一個反向 112 A 的電流。
由於 ACS72981 是利用霍爾效應來測量電流,而磁場是霍爾效應中很重要的因素,因此 ACS72981 很容易受到磁場的干擾,在原廠的 datasheet 中也有特別說明,設計電路板時要盡量避免臨近線路的磁場(通常是大電流路徑造成的)對 ACS72981 造成的干擾。
小結
這次我們談了比較進階的三種霍爾效應元件:線性霍爾感測器、角度霍爾感測器以及霍爾效應電流感測器。其實簡單的一個霍爾效應在半導體製程的成熟下,可以變化出很多種不同應用的零件,也因此賦予電子產品的設計有更多的功能。希望讀者們在看完文章後,在自己的專案中有需要時,能想到這些零件,並加以應用。
(責任編輯:賴佩萱)

- 【Maker電子學】Flash 記憶體的原理與應用—PART22 - 2025/02/27
- 【Maker電子學】Flash 記憶體的原理與應用—PART21 - 2025/02/21
- 【Maker電子學】Flash 記憶體的原理與應用—PART20 - 2025/01/24
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


