作者:阿里哥
前幾篇文章,我們從不同的角度出發,聊過了幾個和機器人相關的主題。從「玩機器人可以學到什麼」、「機器人的移動方式」,到「怎麼做出第一隻機器人」,甚至聊到了赫赫有名的「機器人三定律」。
不過有一個非常基本卻又極為重要的題目,我們卻一直沒有好好地來討論過,那就是到底「什麼是機器人?」 所以這篇文章讓我們一起來聊聊這個主題:什麼是機器人?
 「機器人」的起源
「機器人」的起源
如果有機會到網路上搜尋「什麼是機器人」,我們可以找到不下數十種的定義和說法。不同國家、不同的產業,不同的研究單位都可能有一套自己認為合適的定義。甚至,有些電腦程式也被稱為機器人。而且,如果要完全依照那些精確的定義去決定哪個是機器人,而哪個又不是,我們會發現,將很難找到一台完全滿足所有定義的機器人。
並不是每一台機器都可以被稱之為機器人。那到底什麼樣的機械可以被歸類為機器人呢?
Robot 這名詞,最早出現在1921年捷克科幻作家卡雷爾.恰佩克(Karel Čapek)的著作《羅梭的萬能工人》中,原文是「Robota」,後來成為通行的「Robot」,是用來形容故事中虛構的機器人角色。Robota在捷克語中,是工人或僕人的意思。

《羅梭的萬能工人》科幻劇劇照(來源)
一般而言,大眾印象中的機器人都是很厲害的:除了做事精確可靠不失誤,可以不厭其煩一遍又一遍地執行相同的任務,而不會感到無聊,更可以執行危險或人類不想做的工作。它們天不怕地不怕,甚至可以在深海或外太空這種不適合人類生存的環境中工作。最重要的是,無論你對它們多麼糟糕,它們也不會罷工,更絕對不會上勞工局檢舉你。
認定「機器人」的條件
對於機器人玩家而言,我們傾向以開放的條件去認定機器人的外觀,更著重的,在於它本身所具備的能力,來認定它是不是機器人。這些能力包含:感知環境、自主思考和產生行動。
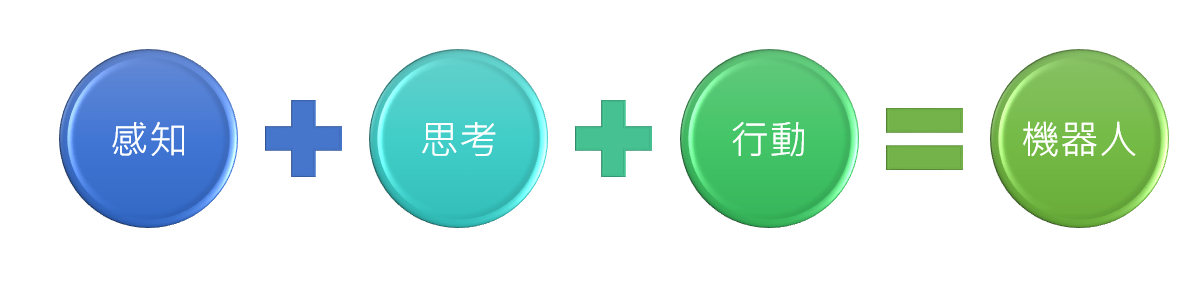
依據機械本身所具備的三大能力,來定義此機械裝置是否為機器人。
1、感知環境
機器人應該要能夠與它們身處的環境產生互動。
與人類不同,機器人沒有視覺、聲音、觸覺、嗅覺和味覺。因此,機器人需要使用各種不同的感知器,來探索和了解它們所處的環境。像是超音波測距感應器、光強度感應器、溫度感應器、壓力傳感器等等。
2、自主思考
機器人需要具有分析判斷的能力。
例如分析感知器收集到的資訊、解決複雜的邏輯問題並自主學習,甚至進一步具有和人類社交互動的能力。目前熱門的「人工智能」技術,就可以被用來提升機器人這個部分的能力。
3、產生行動
機器人要能與周邊環境產生互動,除了能感知外也要能產生相對應的行動。所謂的行動,不只是單單指在路面、水中或是天空上移動的能力。它也包含機器人操控或改變它所處環境的能力,像是改變建築物內的照明或溫度。
因此我們可以這樣定義:「機器人是一部可以感知環境,自主思考,進而產生行動來達成特定任務的機器。」
現實生活中已有哪些機器人?
以踢足球為例,機器人首先要看得到球(感知環境),接著需判斷要將球踢到哪裡去(自主思考),最後產生踢球的動作,將球踢出去(產生行動)。這一系列的過程,跟人類踢球的過程是很類似的。
嚴格的說,需要同時具備這三項能力才能被稱為機器人。像筆記型電腦、多功能烤箱、電視機或汽車就不能算是機器人,因為它們沒有能感知它們周邊環境的能力。智慧型手機雖然功能強大,但也不算是機器人,因為它不會產生行動。另一方面,一台掃地機器人,或能追尋軌跡移動的自動車,則可以被視為是一個機器人系統。

有趣的是,在這個科技產品大爆發的年代裡,「機器人」與「機器」之間的界線變得很不清楚。不是所有擬人化或有人體外型的機械都可以稱作機器人,而完全看不出人形的機械裝置,卻也有可能台道道地地的機器人。例如:沒有人稱CNC車床為機器人,但是相同工作原理的工業用機械手臂總是被稱為機器人;教育用的人型玩具總是被稱為機器人,不過它卻可能完全沒有任何感知周邊環境的功能;而自動駕駛車,卻是台標標準準的機器人,因為它擁有感知、自主思考和產生行動的能力。
結語
有機器人之父美譽之稱的約瑟夫恩格爾伯格(Joseph Engelberger)曾說過:「我無法給機器人一個定義,但是當我看到它時,我就知道它是機器人。」可見要給機器人一個簡單的定義,並非一件容易的事。
我們今天大膽地為機器人選擇了這一套定義,主要的目的只是為了方便未來我們對機器人科技的理解和學習。我們須時時放在心上的是,這定義絕對不是金科玉律,它必然也會隨著機器人科技的提升而與時俱進。永遠保持著開放的態度來面對新科技,像海綿一樣隨時吸收新的知識,應該是我們所能不被科技海嘯淹沒的生存之道。
(本文同步發表於九號空間部落格,文章連結;責任編輯:林佳盈。)
◎加入我們的Line,獲得更多及時文章更新&活動資訊→
![]()

- 【機器人講堂】仿生科技在機器人的應用 - 2019/05/06
- 【機器人講堂】大朋友如何學習機器人 - 2019/04/18
- Maker工作環境大公開,專業玩家的自備工具 - 2019/03/10
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!



Trackbacks/Pingbacks