作者:林鉦育

重點摘要
在本文開始之前,先為各位摘錄本次的實驗重點:
1.實驗用車由 7starlake 所提供。
2.這次實驗並不是以電腦視覺+ AI 作為主要的自動駕駛功能,而是透過GPS + LiDar建圖層(感謝Gabriel Ger)來作為自動駕駛功能,電腦視覺則是使用於危機處理(理由稍後於下文詳述)。
3.實驗時的車速很慢,不到20km/hr。
4.車內座位設計 6人,其他人用站的。
5.本次實驗在信義路上的一小段區域,未來會在特定的封閉區域內開始做定點環繞(封閉區域:科學園區、校園、觀光區⋯⋯或是其他指定道路範圍)。
6.此實驗可以進行,要感謝柯文哲市長與台北市資訊局扛得住看不見的政治壓力。
搭乘源起
7/27 就在臉書看見新聞,報導台北市政府要開放實際無人車實驗空間,讓新科技有落地測試的可能,當我還在臉書感嘆的時候,7/30 LJ 就傳來一個訊息問我有沒有興趣跟著LASS團隊一起搭乘這台車,並重啟舒適度與道路環境實驗。
正當我興高采烈的覺得太棒了,並感恩讚嘆以前認真做研究的成果,讓我現在還可以持續收割。我竊喜地想這次的無人車實驗,只要我請個假,半夜溜去實驗之後,隔天睡死,又是個美好的一日。沒想到實驗的日期是約定在8/4 週五⋯⋯這是一天之內要進行組織質變討論與競賽評審報告,想逃都逃不開,只好忍痛跟LJ說放棄這次的實驗。
不過,緣分就是那麼不可思議,LASS不知道發生什麼原因,必須延後一天才能進行實驗,參加這個實驗團的機會就再度降臨到我身上啦!在結束了無趣的8/4之後,緊接著就是來到聚會指定的8/5凌晨2:30大安捷運站。
前往集合地點的路上,我透過app叫了計程車,路上司機提到他剛從Att 4 fun帶一位顧客來到這附近,也問了我要去哪?要做啥?我就跟他說:「我要去做無人車實驗」
司機一聽,不知道是否感受到未來逼近的壓力,就說:「那或許未來叫車都不用有司機了,直接來一台無人車接送你們就好囉?」
我的回答是:「不用緊張啦,在台灣很可能還要20年吧!」
但我心想,其實科技成熟不用那麼久,但我非常相信大多數台灣人最愛透過自己不敢碰的政治力量,阻擋這些事情的發生。
總之到了現場後,我們整個實驗團(應該是說LASS實驗團,我是插花的XD)趁著現場也沒什麼人,趕緊跑去搭車啦!

出發前大家都在看自己的裝備
無人車搭乘體驗
搭乘流程影片:
一開始主要是透過LJ 幫忙引路,向相關單位拿取實驗名額證明,並分成兩團開始上車實驗。
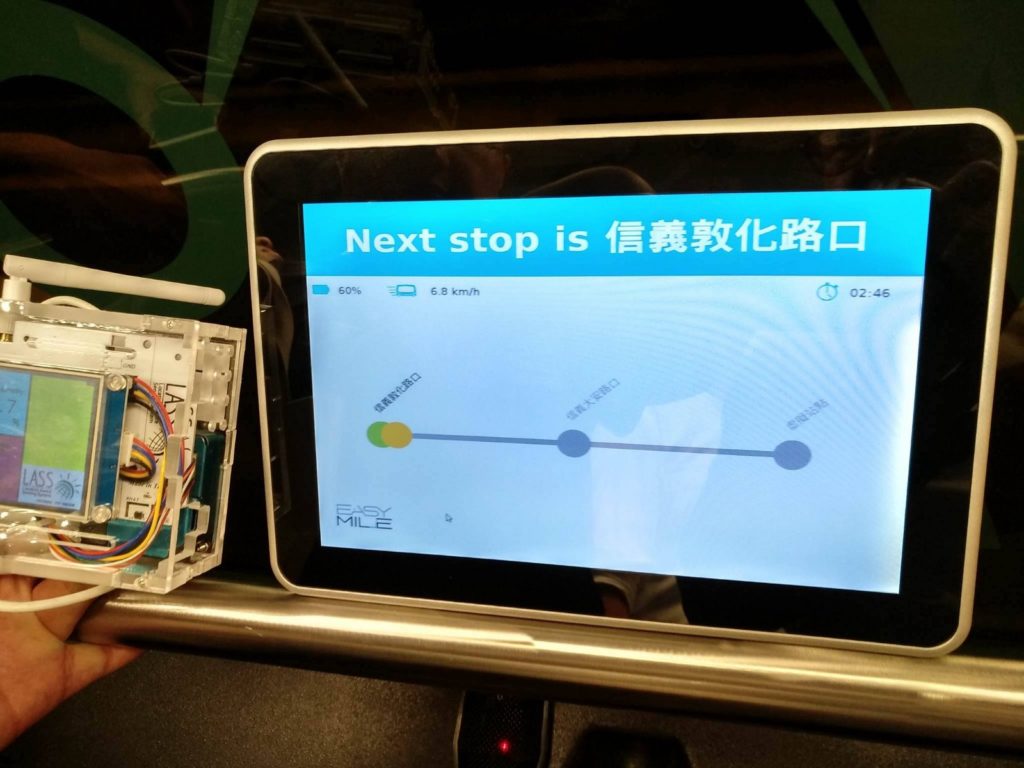
本次實驗站點數
此次路線不長,整個實驗路段總共只有三站,而我們是在中間的那一站上車,每次搭乘都是從信義大安路口上車開始,分別向各自兩站來回走。
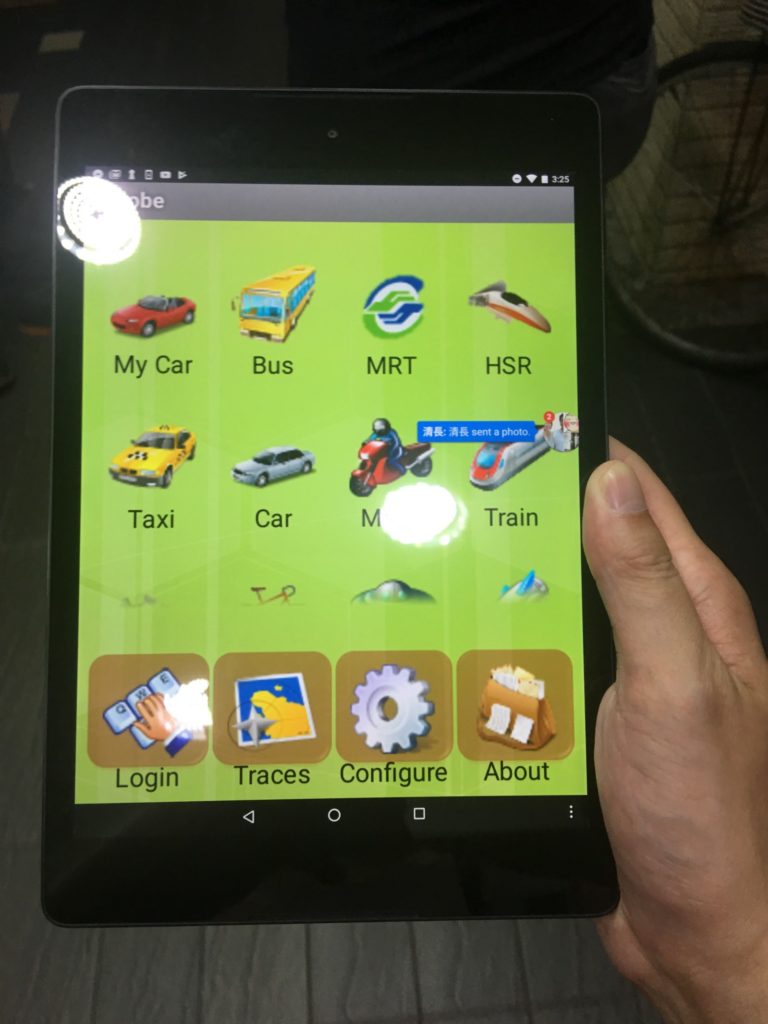
實驗室內部版本VProbe,外面載不到Ker
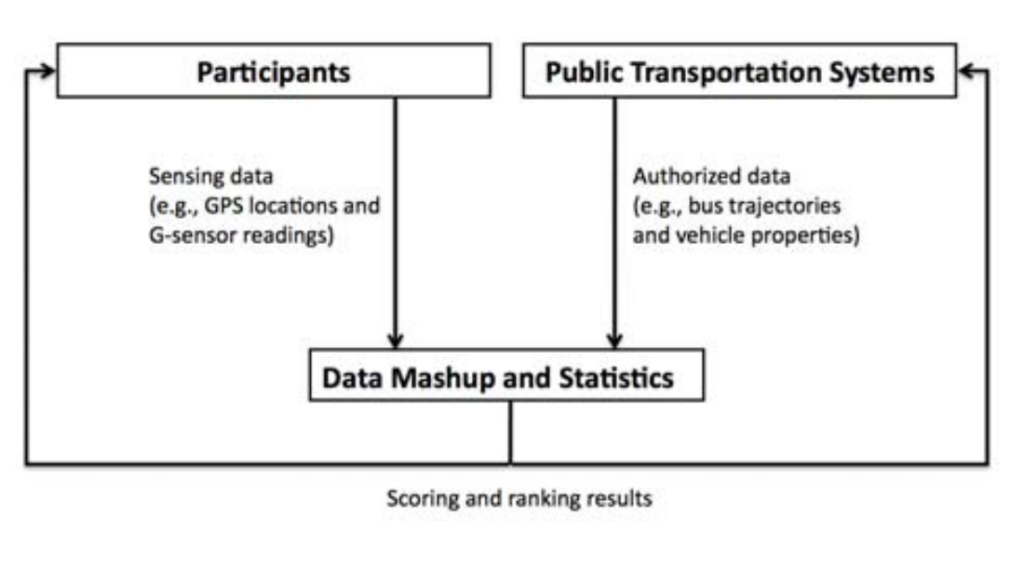
VProbe 實驗架構,不過當年是Statistics,現在應該要用Data Mining比較潮
我的工作主要是拿 VProbe App,量測這趟旅程經過的路線與行駛過程中的駕駛行為好壞,最後VProbe對這次搭乘的評價是:GOOD — 不輸捷運的平穩度。
雖然LJ一直覺得這台車有走走停停的現象,但我個人是沒感受到,App也沒感受到,或許是因為我都是用坐著來感受這台車吧。
乘坐感覺

車內空間不大
這台車真的不大,只有六個座位,同時站位大概也只有6位不到,更重要的是車內空間小,估計在夏天會很恐怖,很熱且空氣循環差,車內空間蠻像在搭乘文湖線。
這次測試行駛速度不到10km/hr,感覺很平穩,但沒有經過正式車流量大的十字路口測試,無法評估是否能在台北市的平面道路上正式運作。
另外我猜測,小空間設計很可能是要利用少量多班的方式,快速有效地運送顧客。畢竟這是無人車,只要能讓班次夠多,也是可以解決大量乘客的問題,而且班次多就更能舒緩尖峰離峰運量不一,難以調度司機班次的問題。
最後一個隱性好處是動力來源是電力,所以這次的實驗車相當安靜而且又不會造成空氣污染,對於都市環境的提升也有相當大的益處。
整體而言,剩下來的問題應該就是法規的開放、技術力是否能達到正式上路,以及商業模式的問題了。
乘後討論

右一是台北市資訊局,右二是中華電信,右三是7starlake總經理,其餘都是LASS團隊
一下車沒多久,由LJ領隊的LASS團隊就跟7starlake的總經理討論合作可能,討論的面向包含:提供LASS網路的支援,如何將空氣盒子放到7starlake上,還有7starlake如何協助LASS團隊持續發展等。
大家交換了不少意見,最後短期內可以看見的是,空氣盒子應該有機會仿豪泰客運模式,在7starlake上的某處放置空氣盒子。可以想見,隨著無人車的佈點拓展,就會有越來越多的無人感測裝置,協助偵測全台灣的環境。
後續有幾個有趣的問題,是開放給LASS與其他有興趣的讀者的,包含:
- LASS 要放哪些感測器在車上?
- 感測器組如何安裝,要安裝在哪些位置?
- 感測器組的電源如果要獨立於車體,那麼電源的來源穩定提供方法或者是永續提供方法要如何做?
- 感測器搜集資料要透過什麼網路進行回傳?
- 感測器組的安裝與建置費用要從何而來?
由此可見,NPO Project要能實際落地,都需要一個好的商業模式才能成真。這也告訴我,未來應該要成為一個遇到任何專案,都能讓他變成可行的商業模式專家,才能幫助許多有趣的事情,在生活周遭不斷發生。
技術問題
剛好旁邊也有做無人車的專業技術人員,現場就直接討論無人車在台灣需要處理的議題,包含:通訊頻道、是否可以釋放5.9MHz的頻帶,與V2X之間的統一溝通協定,以及車子內部電腦或者是IOT裝置的資料處理規範。
另一個有趣的技術問題是,現行無人車遇到的最大問題在於「低速行駛」,若是高速行駛的狀態,無人車需要處理的是公尺級的問題,但在低速行駛要處理的是「公分級」的問題,這考驗感測器的靈敏度與抗噪力,連帶演算法的精準度也必須大幅度提升。
最後則是傳統無人車遇到的問題,為何這次採用GPS+ LiDar,而非我們熟知的電腦視覺+其他感測器?主因是都市環境路線單純,同時大氣中太多不可抗拒之力(包含霧霾與雨天),為了能讓Jobs to be done,與其選用有太多不確定因素的感測器為主要導航功能,還不如採用GPS+ LiDar。雖然這對大多人所期待的AI自駕車還差很遠,但已是很棒的第一步了。
乘後感

本次實驗所有相關成員集合
這次無人小巴的上路,背後除了技術與廠商到位之外,更重要的是相關行政單位的努力,但這個努力需要有遠見與執行力的主事者在位才有辦法,其他人再怎麼做,一旦法規、資金、人員、資源不到位,就無法讓一件好事落地。
這幾年來,很多人說從太陽花後看不見任何改變,又或者是認為台灣很糟糕,但我自己感受到的是,民間的社群持續蓬勃發展,很多有意思的法條與制度正在調整,有趣的活動與產業正在興起,這些改變雖然慢,但誰能說台灣沒有持續在變好呢?我想這些還在覺得爛的人,大概就是同溫層問題吧。
回頭想一想,我在金融還可以做什麼呢?或許就是盡力在可以實踐的地方努力,讓想做的事情落地。也期待無人小巴能真正落地在生活場景之中,讓改變成真!
最後,感謝LASS 團隊與LJ 讓我有這次機會跟團,希望LASS能成為台灣另外一股強而有力的清流,成為幫助社會前進的民間力量典範之一!
(本文同步發表於作者部落格,部落格本文連結;責任編輯:林佳盈)
無人車實驗影片紀錄:
延伸閱讀
- 1.LASS官網
- 2.無人車第一階段實驗結果新聞
◎加入我們的Line,獲得更多及時文章更新&活動資訊→
![]()
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


