
作者:CAVEDU 教育團隊
ROS 機器人作業系統終於完整支援 Windows 作業系統了,網路上有很多安裝教學,今天我們也來跟著做一次。操作過程也請參考 ROS 官網與 Microsoft Gituhub。
Windows作業系統
- ROS1 for Windows 需要 64位元的 Windows 10 Desktop 或 Windows 10 IoT Enterprise.
- ROS1 目前無法執行於 Windows 10 IoT Core.
預留安裝硬碟空間
- 在C: 下建立一個名為 opt 的資料夾,這就是後續安裝的路徑。
- C: 要保留大約 10GB 的空間
安裝 Visual Studio 2017
- 安裝 VS 2017,並建立一個VS prompt 來安裝必要的套件
- 如果需要在 Windows 作業系統上執行 ROS 專案,需要 Visual Studio 與 Microsoft SDK for Windows.
- 請點我下載 Visual Studio 2017 Community 或 Professional 版本
- 安裝時需一併安裝 C++ Development
建立一個 Visual Studio 的系統管理員命令提示字元
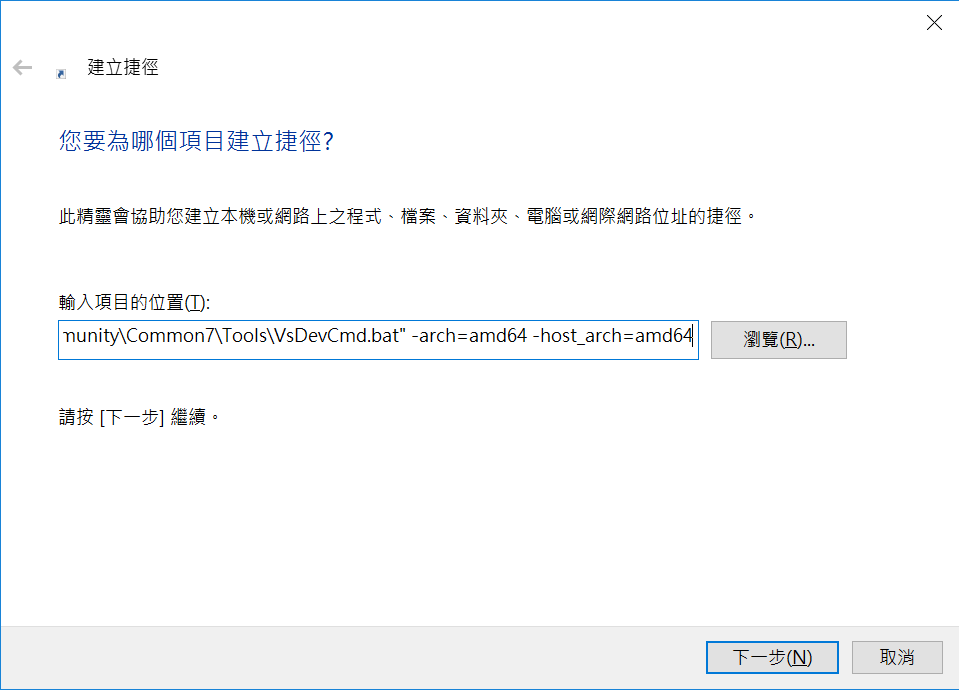
在 C:\opt 資料夾下,點擊滑鼠右鍵,新增一個捷徑
如下圖,請根據您所使用的 VS 版本,輸入以下內容:
VS Community:
C:\Windows\System32\cmd.exe /k "C:\Program Files (x86)\Microsoft Visual Studio\2017\Community\Common7\Tools\VsDevCmd.bat" -arch=amd64 -host_arch=amd64
VS Professional:
C:\Windows\System32\cmd.exe /k "C:\Program Files (x86)\Microsoft Visual Studio\2017\Professional\Common7\Tools\VsDevCmd.bat" -arch=amd64 -host_arch=amd64
VS Enterprise:
C:\Windows\System32\cmd.exe /k "C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\Common7\Tools\VsDevCmd.bat" -arch=amd64 -host_arch=amd64
(圖片來源:CAVEDU提供)
將本捷徑命名為「 ROS 」;
將本捷徑權限設定為系統管理員;
對本捷徑點擊滑鼠右鍵,選擇「屬性」;
在跳出視窗中,點選「捷徑」標籤,同一視窗中點選下方的「進階」按鈕,如下圖:
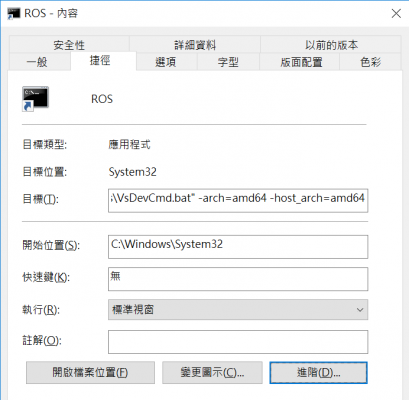
(圖片來源:CAVEDU提供)
勾選「以系統管理員身分執行」,接著連按兩次 OK 就完成。如下圖:

(圖片來源:CAVEDU提供)
安裝 Chocolatey
Chocolatey 是一個 Windows 套件管理器,類似於 Linux 的 apt-get,方便安裝各種 ROS 所需的工具與函式庫。請由 Chocolatey 網站下載對應的套件包並安裝完成。後續就可使用 choco install 等語法來安裝所需的套件。
(圖片來源:CAVEDU提供)
Chocolatey 安裝完成之後,開啟上一步所完成的 ROS 命令提示字元,並輸入以下指令:
@"%SystemRoot%\System32\WindowsPowerShell\v1.0\powershell.exe" -NoProfile -InputFormat None -ExecutionPolicy Bypass -Command "iex ((New-Object System.Net.WebClient).DownloadString('https://chocolatey.org/install.ps1'))" && SET "PATH=%PATH%;%ALLUSERSPROFILE%\chocolatey\bin"
將上述內容貼入命令提示字元並按 Enter,有相關詢問請都同意。完成之後請關閉這個 ROS 命令提示字元:
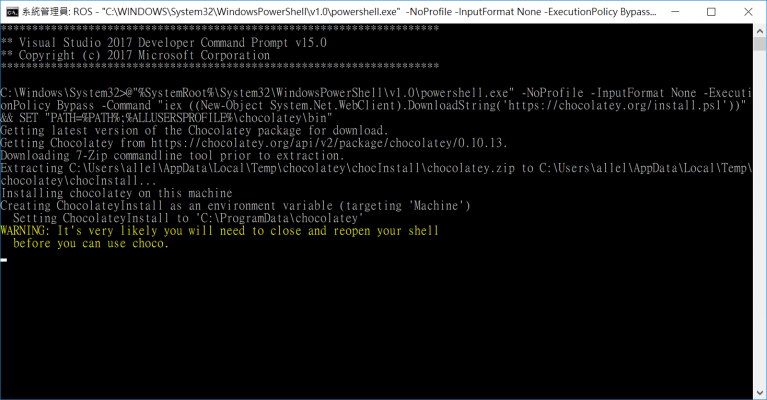
(圖片來源:CAVEDU提供)
安裝 Git
Git 的功能不用多說了吧,方便我們取得許多套件以及網路上的範例。請在 ROS 命令提示字元中輸入以下指令:
choco install git -y
安裝 ROS for Windows
ROS 官方文件建議安裝 desktop_full metapackage ,是所需套件的集合,包含了機器人建置、執行、除錯與視覺化等相關功能。
請在 ROS 命令提示字元中輸入以下指令,在此需要一些時間:
choco source add -n=ros-win -s="https://roswin.azurewebsites.net/api/v2" --priority=1 choco upgrade ros-melodic-desktop_full -y
ROS 2 並存
如果需要使用 ROS2,可以建立一個獨立的空間再指到這裡。例如以下指令就是指到 c:\opt\chocolatey:
mkdir c:\opt\chocolatey set ChocolateyInstall=c:\opt\chocolatey choco source add -n=ros-win -s="https://roswin.azurewebsites.net/api/v2" --priority=1 choco upgrade ros-melodic-desktop -y
後續可用以下指令來更新:
set ChocolateyInstall=c:\opt\chocolatey choco upgrade ros-melodic-desktop -y
以上就是ROS的安裝與環境設定。接下來就讓我們簡單測試一下ROS是否能正常使用。
操作 ROS on Windows
ROS 操作幾乎都是在命令提示字元下完成的,且常常需要開啟多個。
在 ROS 命令提示字元中執行 ROS setup script:
c:\opt\ros\melodic\x64\setup.bat
如果未出現錯誤,就可以執行常用的 ROS 指令,建置節點,一起來玩吧!相關 ROS command line 指令請點我
執行常用 ROS 指令
相關ROS command line 指令請點我,各 ROS 命令提示字元開啟之後都要執行一次,或者可以再加入 “&&c:\opt\ros\melodic\x64\setup.bat“,這樣就不用每次都輸入了。如下圖:
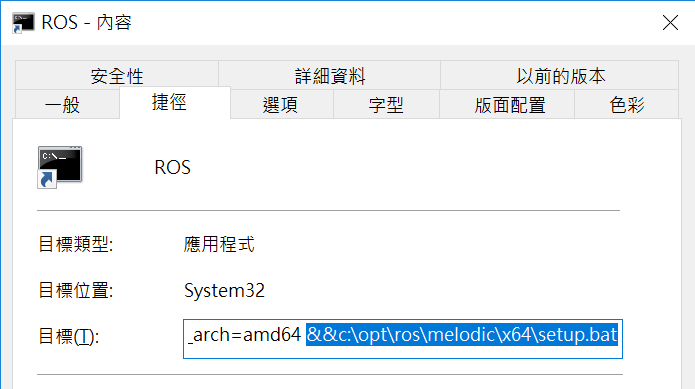
(圖片來源:CAVEDU提供)
首先,先執行 roscore:
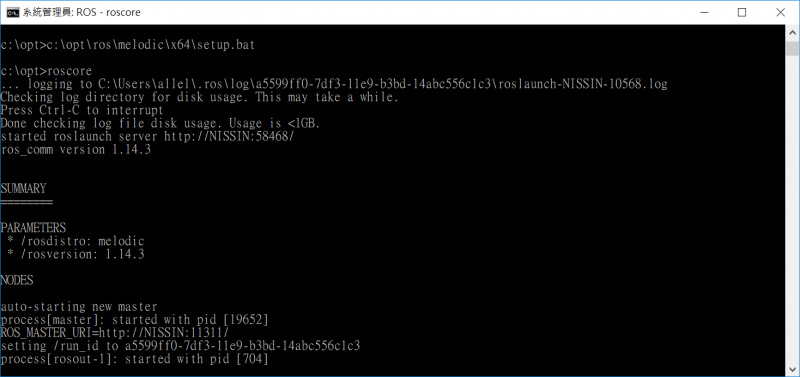
(圖片來源:CAVEDU提供)
執行 rostopic list,看看可用的 topic:
(圖片來源:CAVEDU提供)
執行 rosrun roscpp_tutorials talker

(圖片來源:CAVEDU提供)
註:
如果出現 qt 相關錯誤時,可以手動安裝 qt (https://www.qt.io/download)
(本文轉載自 CAVEDU 教育團隊、原文連結;責任編輯:楊子嫻)

- 【CAVEDU講堂】NVIDIA Jetson AI Lab 大解密!範例與系統需求介紹 - 2024/10/08
- 【CAVEDU講堂】Google DeepMind使用大語言模型LLM提示詞來產生你的機器人操作程式碼 - 2024/07/30
- 【CAVEDU講堂】《Arduino首次接觸就上手》新手村教學:LED燈閃爍 - 2024/04/18
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


2022/09/05
建議您到原文下方留言提問,回覆會比較快喔:https://blog.cavedu.com/2019/05/24/ros-windows-install/
2022/09/05
Hi Sir,
在進行 desktop_full metapackage時,遭遇
“Error retrieving packages from source ‘https://roswin.azurewebsites.net/api/v2’:
無法解析遠端名稱: ‘roswin.azurewebsites.net'”
錯誤,請問該如何處理