作者:陸向陽
俗話說:「沒吃過豬肉也看過豬。」是的,無論有無玩過,相信大家多少看過無人機表演。無人機(UAV、UAS、Drone)是個俗稱,學名稱為「多軸飛行器」或「多旋翼機」,為何這東西近年來如此火紅?筆者對此進行一些詢問,也自己找資料研讀,試圖拼湊其發展歷程。

(圖片來源:shutterstock)
無人機初期發展
首先討論第一個問題,「已經有遙控玩具直升機了,為何還需要無人機?」是的,如果只是要達成滯留於空中這一點,直升機就足以勝任,似乎沒必要用無人機。
但其實,無人機是技術演進下的產物。
先從過去的發展說起。早在 20 世紀初期,人類就嘗試做旋翼型飛機,但只有一個旋翼是無法飛行的;飛上去的飛機,機翼旋轉,機翼切割空氣後的反作用力也會使機身反向旋轉,導致無法操控方向,這也是電影常出現的情節:直升機尾翼被破壞後,機身就一直旋轉下墜。
為了避免反作用力,而在尾部增加一個小型垂直旋翼,用來抵消機身旋轉的反作用力,如此即可穩定飛行,這就成了今日的直升機。而在解決反作用力問題的過程中,也有人提出用兩個、三個或更多個水平旋翼的作法,一方面提供方向升力,一方面也抵消反作用力,但實際嘗試的結果也難以穩定飛行,因而作罷。
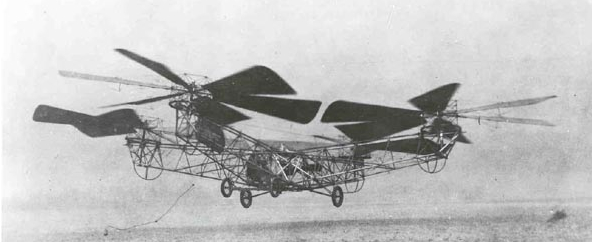
上個世紀 1923 年由George De Bothezat 設計的四軸飛行器,在俄亥俄州一個名為 McCook Field 的專門試飛場,升空約 2 分 45 秒即降落。
線傳飛控系統讓操作更便利
說到這,再從另一點切入,許多人是否看過二戰前後的戰爭電影中,飛機在下墜無法拉升時,鏡頭會帶到飛行員努力把操作桿往下壓,試圖讓飛機攀升?
是的,過去的飛機是靠著機械連動桿方式,將飛行員的操作桿與飛機上的襟翼連結,飛機調整襟翼角度來決定爬升或下降,而飛機飛得越快,空氣給襟翼的阻力就越大,飛行員要用更大的力量才能調整襟翼角度。
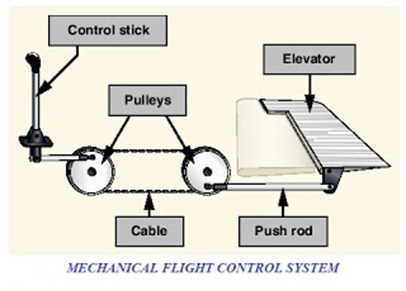
最傳統的飛行操控,駕駛的操作桿與襟翼機械連動(圖片來源:pritamashutosh.wordpress.com)
二戰結束後,完全機械連動的作法有些改善,改用油壓,飛行員扳動襟翼的力道壓力稍獲減輕,但飛行越快速阻力越大的問題依然存在,只是施力比重降低。
接下來到了 1970 年代,F-16 戰鬥機嘗試改用線傳飛控系統(Fly by Wire),即是用馬達與襟翼連動,飛行員的操作桿,只是單純的方向指示,而操作桿的電子信號會傳遞到馬達上,進而調整襟翼角度,如此一來,飛行員正式脫離急升急降、快升快降的費力費功時代。
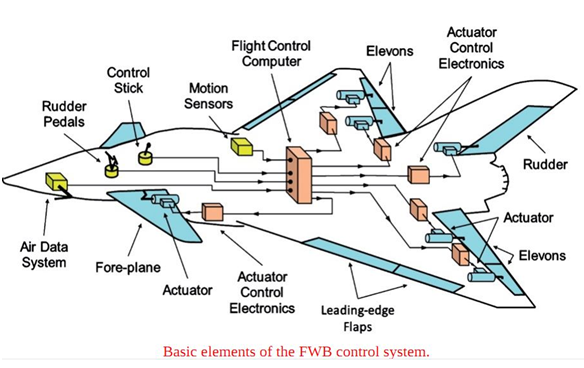
線傳飛控系統示意圖(圖片來源:aviationnepal.com )
事實上,今日多數汽車的方向盤也都使用油壓技術,使方向盤轉動比較不費力,但在高速下依然會感到難以轉動方向盤,因而有車廠提出動力方向盤,讓方向盤也成為單純的方向指示,轉動的機械方向轉變成電子信號,傳遞到馬達上,由馬達負責真正的機械扭轉。這也是為了未來的自動駕駛、自動停車等功能鋪路。
加速度感測器達成穩定飛行
線傳飛控系統是一個重要的演進歷程,另一個重要演進歷程要提到 2006 年的 Wii 與 2007 年的 iPhone,Wii的遊戲手把 Wii Remote 使用加速度感測器,來感測玩家的肢體動作,而第一代 iPhone 也因為配置了加速度感測器,一旦感應到 iPhone 手機的方位轉變,手機螢幕也就跟著垂直顯示、水平顯示。
加速度感測器之後的消費性應用也越來越多,例如拍照防手震、輔助導航等,但更因為有了加速度感測器,使多旋翼飛行成為可能。
前面曾提到,多旋翼飛行因為不穩定而作罷,但有了加速度感測器之後,可以將不穩的方位角度,以電子信號方式傳遞給微控制器(Micro Controller Unit,MCU)晶片,且每秒可以傳遞數十、上百次訊號,微控制器晶片再將訊號進行快速運算,而後對不同位置的旋翼,下達不同的轉速訊號,如此快速感應、快速修正,使穩定飛行成為可能。
線傳飛控系統、微控制器晶片、加速度感測器(更嚴格說,是拜半導體領域的 MEMS 微機電系統技術進步,才能讓加速度感測器小型化、便宜化,進而打入消費性電子應用市場)這三者,使過去單純人為操控的多旋翼飛機可以穩定飛行,因此,現在可以看到二旋翼、三旋翼、四旋翼,甚至到十六旋翼都有。

亞馬遜運貨無人機 Amazon Prime Air 初期採八旋翼設計(圖片來源:Amazon Prime Air)
不過各位可以發現,為何看到的示範總是四旋翼居多?其實,二旋翼會有偏傾的問題,除非旋翼有傾轉機制才能保持穩定飛行,機械設計上較複雜。
而更增加到八個旋翼、十個旋翼呢?其實未嘗不可,而且滯空時比四旋翼更穩定,但缺點是更多馬達更耗電力,滯空時間更短,以及更多旋翼也代表需要更多的 MCU 運算才能實現穩定操控,軟體運算與控制上較為複雜;所以四旋翼是求取穩定飛行、機械構造簡單、操控運算簡單等考量而得。
充滿可能的未來應用
回頭來討論「為何不持續用直升機?」答案因為是直升機的機械構造比較複雜,水平的大型主旋翼與尾部的小型垂直旋翼間有著機械連動關係,保養起來比較麻煩,較不易維持機械妥善性,而這正是大家看好四軸多旋翼飛行的原因,希望在保有硬體、軟體的簡單性前提下,逐漸提升發展。
直升機主旋翼與輔助旋翼間的機械連動結構(圖片來源:mie.umass.edu)
雖然看好,但目前四旋翼無人機依然存在提升的挑戰,例如多數無人機的續航時間僅在半小時內,若配備更大的電池,機身重量也會增加,要升空馬達也會更耗電,依然無法長久,甚至縮短滯空時間;針對此現象,對岸大陸業者提出使用燃料電池,宣稱電力可達 4.5 小時的續航,但燃料電池自身的商業化也是個問題。
不過一切都還在嘗試中,一切都有可能;Google 就曾提出 Wing 專案,試圖結合旋翼與定翼(即一般飛機、滑翔機)的好處,但之後宣告失敗。Amazon 也在發展送貨無人機 Prime Air Drone,後續的新機款也是嘗試結合旋翼與定翼,看來無人機的技術發展與應用,仍有極大的發展與想像空間。
(責任編輯:小波)

- 「公升級」Agentic AI方案比較:Apple、NVIDIA、AMD - 2026/06/29
- 受保護的內容: 輕鬆實現創意:M5Stack AI Chatbot、Cardputer Adv開箱體驗 - 2026/06/26
- 創客開發板AI加速晶片觀察 - 2026/06/26
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


