
送餐也將無人化:AI配送從洛杉磯到澳洲黃金海岸
AI與機器人技術快速發展,「送餐機器人」被視為最有機會率先改變民眾日常生活的應用之一。相較於仍在測試階段的自駕車,人行道配送機器人的運行環境較為單純,配送距離通常只有數公里,因此更容易率先落地。
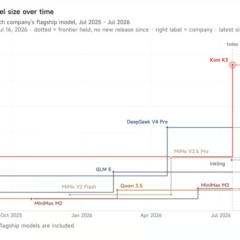
月之暗面Kimi K3模型技術觀察
北京月之暗面(Moonshot AI)在7月份發佈其最新的大語言模型Kimi K3,該模型因為有2800B(或寫2.8T,T為Trillion,台灣稱為2.8兆,大陸稱為2.8萬億)的龐大參數量而受到矚目。

【創業小聚】瞄準無人機「通訊層」 澤龍智能搶攻非紅商機
成立於 2025 年的澤龍智能(LongLink Solutions),以無人機的「通訊層」為核心定位,打造兼具安全性、抗干擾與量產能力的通訊系統。

推探OpenAI Codex Micro專屬控制器
OpenAI在7月揭露一個前端AI硬體產品,稱為Codex Micro,Codex是OpenAI開發、訓練出的一個大語言模型,專門用於撰寫程式,而Codex Micro則是用來支援呼應Codex應用的硬體控制器。

提升購屋效率與體驗 日本房仲業導入「AI+真人」新模式
生成式AI快速發展,各行各業都開始思考如何將人工智慧導入日常工作,而高度依賴資訊整理、客戶服務與市場分析的不動產產業,也成為AI應用的重要場域。

AI仿生機器人將重新定義人與機器的關係?
中國機器人企業 UBTech(優必選)近期發表的全尺寸「Ultra-Bionic」系列仿生機器人,將人形機器人的焦點從「工作能力」延伸到了「情感陪伴」。