隨著人形機器人與自主移動機器人(AMR)從實驗室走向工廠與家庭,邊緣端的運算架構正面臨歷史性的轉折。Intel 最新推出的 Panther Lake(Core Ultra 系列 3)處理器,憑藉革命性的 Intel 18A製程,將 CPU、GPU 與 NPU完美整合至單一晶片中,開創了高達 180 Platform TOPS 的異質算力新巔峰。
然而,空有強大的硬體並不足以讓機器人靈活運作,Intel 透過 OpenVINO™ 軟體工具鏈,居中扮演了「大腦神經中樞」的角色。本文將深入探討 Panther Lake 三核心異質架構在機器人開發中的核心定位,以及 OpenVINO 如何釋放邊緣端 AI 的極致潛力,為具身智慧落地奠定堅實基礎。
晶片製程與架構的雙重飛躍:Panther Lake 點燃機器人邊緣算力
在具身智慧(Embodied AI)與雙足人形機器人蓬勃發展的 2026 年,機器人本體對於邊緣運算晶片的要求,已經從單純的「高算力」演進為「高能效比」與「極致的即時響應」。
傳統機器人開發往往需要拼湊多套硬體系統:使用工業級 CPU 跑即時作業系統(RTOS)以控制馬達關節,再外接一張獨立的 GPU 顯示卡或 AI 加速模組來處理視覺感知。這種碎片化的硬體架構不僅帶來高昂的功耗與散熱成本,更因為晶片間通訊的延遲,限制了機器人在複雜動態環境中的反應速度。
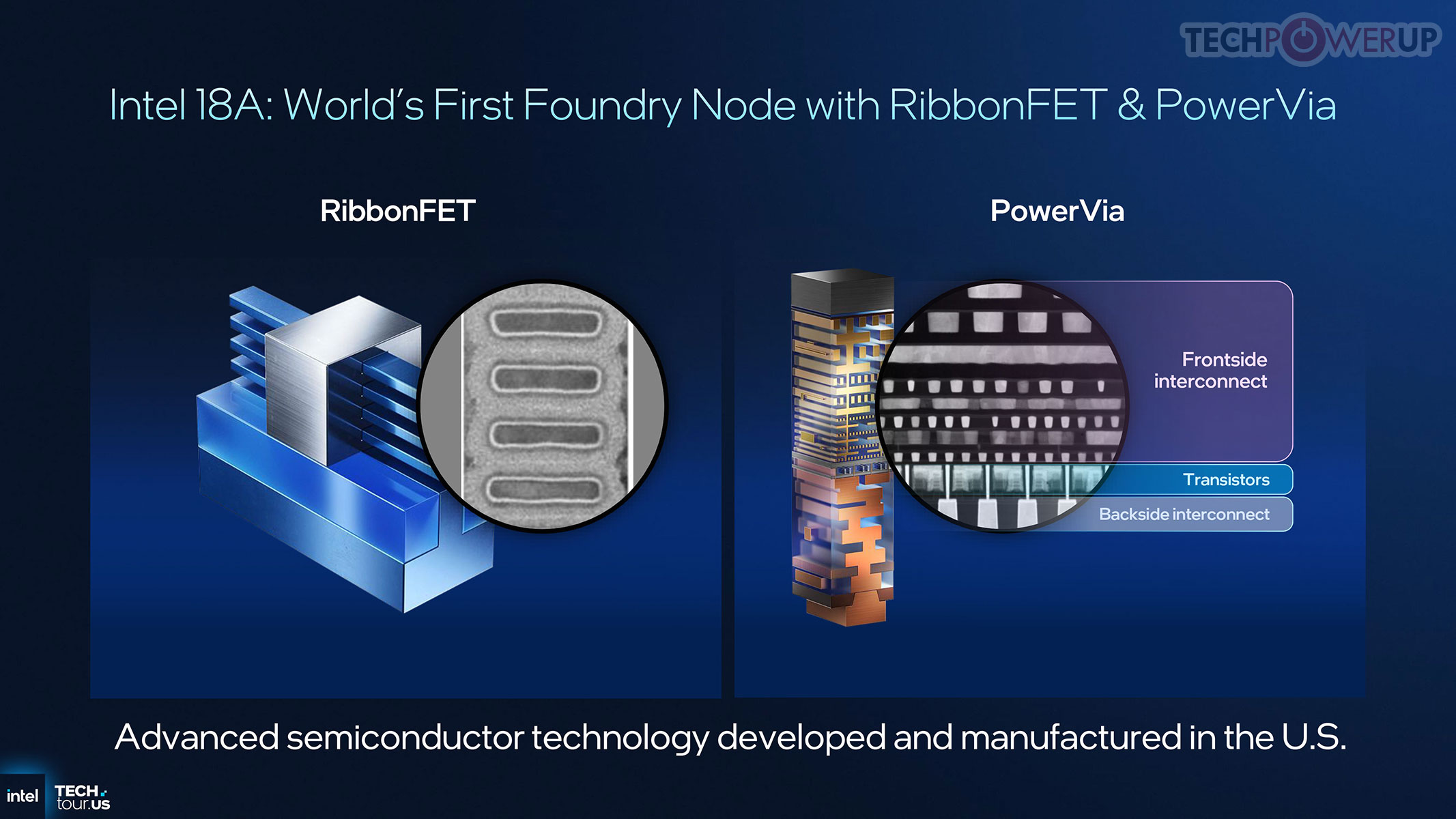
Intel Panther Lake 的誕生徹底打破了這項硬體壁壘。作為首款採用 Intel 18A(1.8奈米級)尖端製程的大眾市場處理器,Panther Lake 在極小的封裝空間內,完美實現了 CPU、GPU 與 NPU 的單晶片融合(SoC)。這意味著機器人研發人員可以在單一主機板、甚至是單一嵌入式模組上,同時處理高精度的實體運動控制、大規模平行空間建圖,以及低功耗的機載 AI 推論。
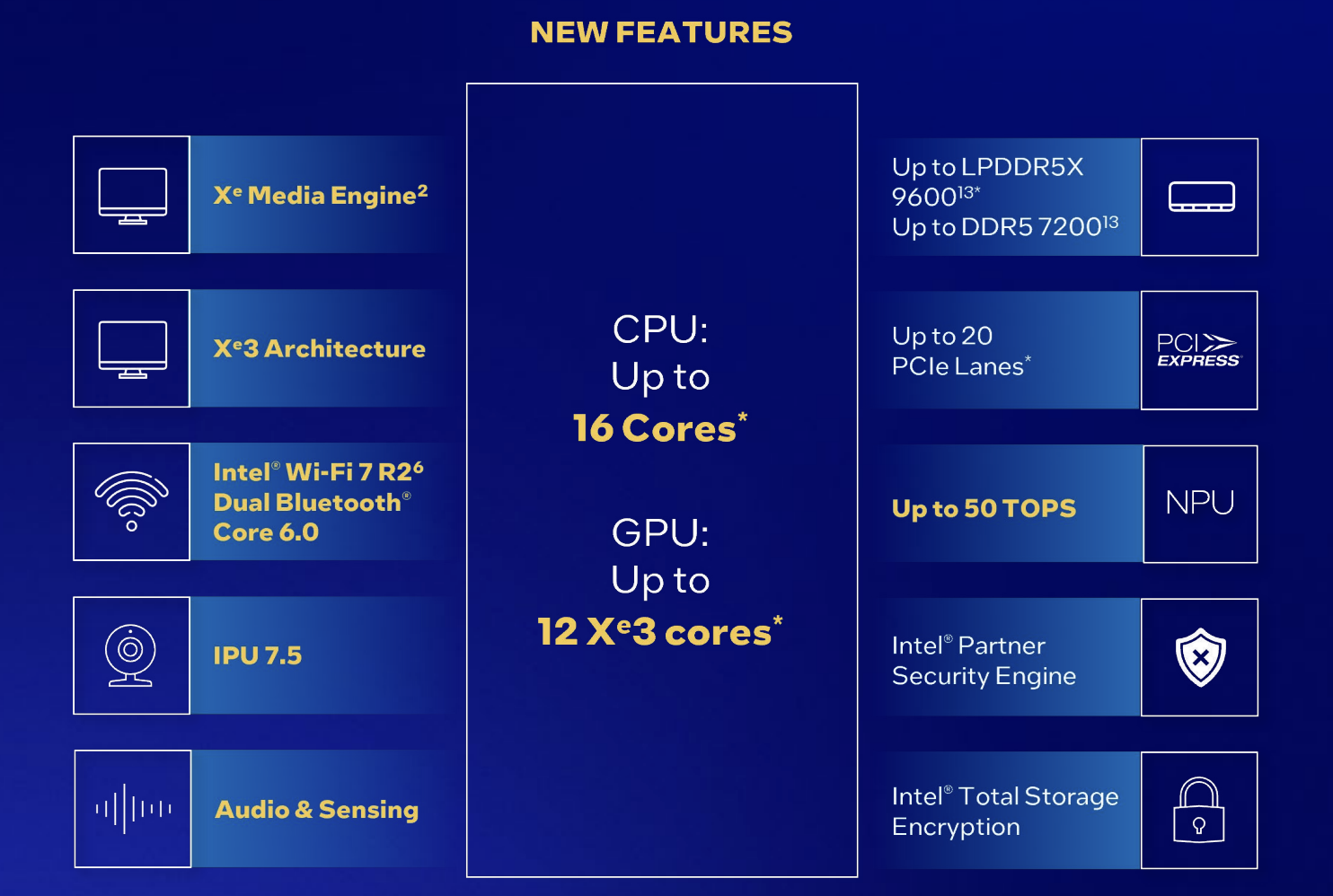
Intel® Core™ Ultra Series 3 (Panther Lake)新功能(source)
這種「異質整合」不僅顯著縮小了機器人內部的微型控制艙空間,更將系統整體的功耗控制在極佳的範疇,直接解決了人形機器人因電池續航不足而難以商業化部署的痛點。
各司其職的異質三核心:打造機器人的身、心、靈
Panther Lake 的 180 Platform TOPS 總算力並非盲目的數字堆疊,而是透過高度最佳化的三大運算單元進行「各司其職」的精密分工。在機器人的底層軟體架構中,這三個核心分別對應了不同的感官與運動功能。
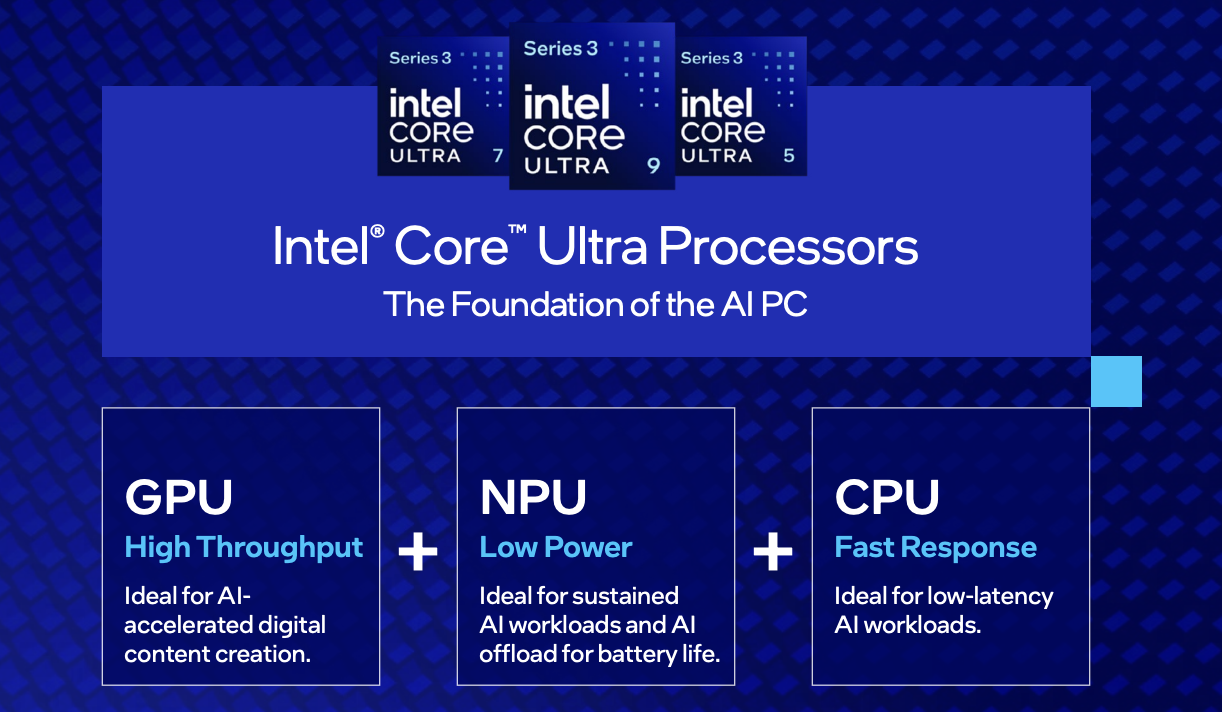
CPU:機器人的「中樞神經與骨骼控制」
首先,CPU 部分採用了次世代的 Cougar Cove 效能核心(P-Core)與 Darkmont 節能核心(E-Core)架構。P-Core 擁有極高的單執行緒效能與微秒級的指令響應,這在機器人控制領域中是不可或缺的「骨骼運動中樞」。
機器人的平衡控制、步態規劃以及逆運動學(Inverse Kinematics)解算,本質上都是高度依賴序列邏輯的複雜數學矩陣。這類運算需要維持在 1kHz 以上的超高控制循環頻率(Control Loop),一旦發生任何卡頓,機器人就會立刻失去平衡而跌倒。
Panther Lake 的 P-Core 能以極低的時脈抖動(Jitter)確保運動指令的確定性輸出。與此同時,Darkmont 節能核心與低功耗節能核心(LP-E Core)則負責處理底層硬體通訊協定堆疊,例如接收來自 CANBus、EtherCAT 或高速乙太網路的感測器資料封包,或是當機器人處於待機巡檢狀態時,以低於數瓦的功耗維持基礎的系統監控與電池管理系統(BMS)。
GPU:機器人的「脊髓反射弧」(視覺感知與安全)

其次,整合了 Xe3 Celestial 架構的內建 GPU,則擁有高達 122 GPU TOPS 的龐大資料處理量,並原生自帶硬體級的 Tensor Cores 與光線追蹤單元。在機器人系統中,GPU 扮演的是「空間想像與高級認知」的角色。
舉例而言,當機器人在未知的工廠環境中移動時,必須依賴視覺同時定位與建圖(Visual SLAM)演算法,即時將深度相機與光達(LiDAR)傳回的數百萬個點雲資料,轉化為三維空間地圖。這種大規模平行且運算精度要求極高(FP16/FP32)的任務,正是 Xe3 GPU 的絕對主場。
此外,近年火熱的端對端模仿學習模型(Imitation Learning),其基於 Transformer 的龐大網絡架構也高度依賴 GPU 的 Tensor 核心進行大吞吐量的資料流處理。
NPU:機器人的「高級認知與空間想像」
最後,晶片中所搭載的次世代 NPU 5(神經網路處理器)則提供約 50 TOPS 的專用 AI 算力。NPU 在機器人開發中被定位為「脊髓反射弧」,專門負責需要「常時啟動」(Always-On)且具備「確定性延遲」的低功耗感知任務。
1.視覺感知與主動避障:
NPU 負責即時運作 YOLOv10 或各類語意分割模型,對畫面中的人員、障礙物或掉落物進行不間斷的物體檢測。由於 NPU 在硬體層面上與 CPU 和 GPU 相互隔離,即使機器人的 GPU 正因處理複雜的 3D 建圖而滿載,NPU 的避障功能也絕對不會受到資源搶佔的影響,確保機器人在任何極端情況下都能做出即時的「神經反射」,避免撞擊人類或設備。
2.多感測器融合與低功耗運作:
機器人的觸覺感測器、六軸 IMU 資料以及低解析度環境監測畫面,皆可直接送入 NPU 進行即時融合推導。NPU 執行 INT8 或最新 FP8 精度的 AI 模型時,其每瓦效能比(Perf/Watt)遠遠超越傳統 GPU,這讓機器人能夠在不犧牲感知精確度的前提下,大幅延長單次充電的作業時間。
異構晶片的比較與分工
為了更直觀地理解 Panther Lake 各個運算單元在機器人開發中的核心價值,下表針對 CPU、GPU 與 NPU 的特性與實際應用場景進行了深度對比:
| 處理器單元 | 機器人角色 | 核心工作類型 | 關鍵優勢 |
|---|---|---|---|
| CPU | 骨骼運動控制 | 步態規劃、力矩計算、CANBus/網路通訊、系統管理 | 實時性高、邏輯處理能力強 |
| NPU | 神經反射(安全) | 實時避障、目標追蹤、深度相機資料處理、Always-On監測 | 零資源搶佔、功耗極低、延遲穩定 |
| GPU | 大腦思考(認知) | 3D SLAM 建圖、大語言模型語意理解、複雜操作模型 | 浮點平行運算能力強、吞吐量大 |
OpenVINO:化繁為簡的軟體交通警察與神經優化器
硬體架構的多元化雖然帶來了前所未有的強大性能,但同時也給軟體工程師帶來了巨大的挑戰。在實務開發中,如何協調不同的 AI 模型在 CPU、GPU 與 NPU 之間無縫切換?如何確保高優先級的避障任務不會因為大模型的載入而產生延遲?Intel 針對這項痛點給出的完美答案,就是 OpenVINO™(Open Visual Inference & Neural Network Optimization)推論引擎工具鏈。
如果將 Panther Lake 比喻為擁有多種強大武器的戰士,那麼 OpenVINO 就是其大腦的決策與協調系統。OpenVINO 在機器人開發中,首先扮演的是「異質架構的交通警察」。透過其核心的 「AUTO 模式與動態排程機制」,開發者不再需要以硬編碼(Hard-coding)的方式死板地指定某個模型必須在哪個硬體硬碟上執行。OpenVINO Runtime 會即時監測 Panther Lake 各個核心的當下負載與記憶體頻寬。
當機器人在密集通訊或進行複雜運動控制、導致 CPU 負載激增時,OpenVINO 會在微秒之內,自動將原本在 CPU 上排隊的視覺識別任務轉移至 NPU 或 GPU 執行。更重要的是,它具備完善的「動態退避(Fallback)機制」。一旦 NPU 因處理大規模光達資料而滿載,OpenVINO 能確保緊急的障礙物識別模型瞬間切換至 GPU 的 Tensor 核心或 CPU 的 AVX-VNNI 向量指令集運作,這種軟體層面的高可用性,是確保機器人不會在現實複雜工廠環境中突然「當機」或失控的關鍵技術。
除了智慧調度,OpenVINO 更是機器人 AI 模型的「神級瘦身教練」。具身智慧時代的模型體積動輒數億甚至數百億參數,若直接塞進邊緣端晶片,不僅會撐爆記憶體,還會帶來恐怖的耗電與發熱。OpenVINO 內建的 NNCF(神經網路壓縮框架,Neural Network Compression Framework),能夠在幾乎不損失模型精度的前提下,對權重進行深度的最佳化與壓縮:
1.領先的混合精度量化技術:
針對 Panther Lake 的 NPU 5 硬體特性,OpenVINO 的 NNCF 能夠將主流 PyTorch、TensorFlow 或 ONNX 格式的模型,一鍵轉換為 FP8(8位元浮點數) 或 INT8(8位元整數)的混合精度格式。這使得大型多模態模型在機載端運作時的記憶體頻寬佔用減半,運算速度與能效比獲得數倍的爆發性提升。
2.打破框架壁壘的統一中間表示(IR):
機器人研發團隊往往由多個小組組成,視覺組慣用 PyTorch 訓練物體檢測,語意組習慣用 Hugging Face 的 Transformers 部署語音,控制組則可能使用 MATLAB 或 C++。OpenVINO 充當了「統一語言翻譯官」,不論底層訓練框架多麼碎片化,都能將其轉化為統一的 `.xml` 與 `.bin` IR 檔案。上層開發者只需要呼叫統一的 `openvino.compile_model()` API,即可輕鬆榨乾 Panther Lake 的每一滴硬體性能,大幅縮短了產品研發與上市的週期。
結語
Intel Panther Lake 異質晶片與 OpenVINO 的強強聯手,本質上重新定義了邊緣端機器人開發的遊戲規則。它成功將傳統上互不相容的「高即時序列控制」與「大規模平行 AI 推論」完美融合在單一晶片生態中。透過 OpenVINO 的智慧調度與模型量化,機器人不僅擁有了更長效的續航力,更獲得了在無網路連線環境下、完全在裝置端(On-Device)執行多模態感知與避障的硬實力。
這場由軟硬體協同引領的技術革命,無疑為接下來具身智慧機器人走向更大規模的商業化落地,鋪設了一條平坦且高速的坦途。在下一篇文章中,我們將進一步探討 Intel 如何透過 Open Edge Platform 2026.0 與全新推出之 Physical AI Studio,將這一軟硬體優勢拉升至全新的 VLA(視覺-語言-動作)模型高度,實現真正的具身模仿學習。
(責任編輯:歐敏銓)
》延伸閱讀:
1. Intel Core Ultra Series 3(Panther Lake) Architecture Whitepaper
詳細闡述了 Intel 最新世代異構架構、18A 工藝及 NPU 5 的底層硬體運作邏輯。
2. OpenVINO™ Documentation (2026.0 Long-Term Support Release)
3. Intel Panther Lake在OpenVINO 2026.0上的效能表現

- 電腦視覺結合AI、數位孿生 2026年世足賽號稱史上最「高科技」 - 2026/07/10
- Agentic PC來了?NVIDIA RTX Spark重塑邊緣、桌機算力版圖 - 2026/07/09
- 聚焦機器人與智慧應用 ASRock新推高效能邊緣AI控制器 - 2026/07/09
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!


