想像在未來的工廠裡,一名技術人員雙手正專注於焊接,與此同時,從他背後伸出的兩隻機器手臂正穩穩地扶住沉重的零件,並在焊接完成的瞬間遞上檢測儀器。這不是科幻電影,而是「穿戴式機器手臂(Supernumerary Robotic Limbs, SRL)」的落實場景。作為「物理 AI」的最前瞻應用,SRL 正讓人類跨越生物學的限制,進入「多肢協作」的新紀元。
突破進化的侷限:什麼是 SRL?
穿戴式機器手臂(SRL)不同於傳統的動力外骨骼(Exoskeleton)。外骨骼的主要目的是「增強原有肢體」的力量,而 SRL 則是為人類「增加額外肢體」。這項技術的核心挑戰不在於機械結構,而在於如何讓這對「多出來的手」與人類大腦達成直覺般的同步。
隨著具身智能(Embodied AI)的突破,SRL 已能透過輕量化神經網路實施「意圖預測」。機器人不再是被動等待指令,而是透過穿戴者的身體語言(如重心偏移、肌肉電訊號)來判斷何時需要介入輔助。
表一:SRL 與傳統外骨骼技術對比
| 比較項目 | 動力外骨骼 (Exoskeleton) | 穿戴式機器手臂 (SRL) |
|---|---|---|
| 核心目的 | 增強原有肌肉、減輕負重 | 增加獨立肢體、執行並行任務 |
| 控制方式 | 追隨人類肢體運動 | 自主/半自主 AI 意圖識別 |
| 自由度 (DoF) | 與人體關節同步 | 額外 6-12 個獨立自由度 |
| 主要痛點 | 穿戴笨重、運動受限 | 大腦認知負荷、重心不穩 |
核心技術:如何操控「第三、四隻手」?
要讓人類同時操控三、四隻手,最大的挑戰是「認知負荷(Cognitive Load)」。目前的解決方案主要分為以下兩大路徑:
-
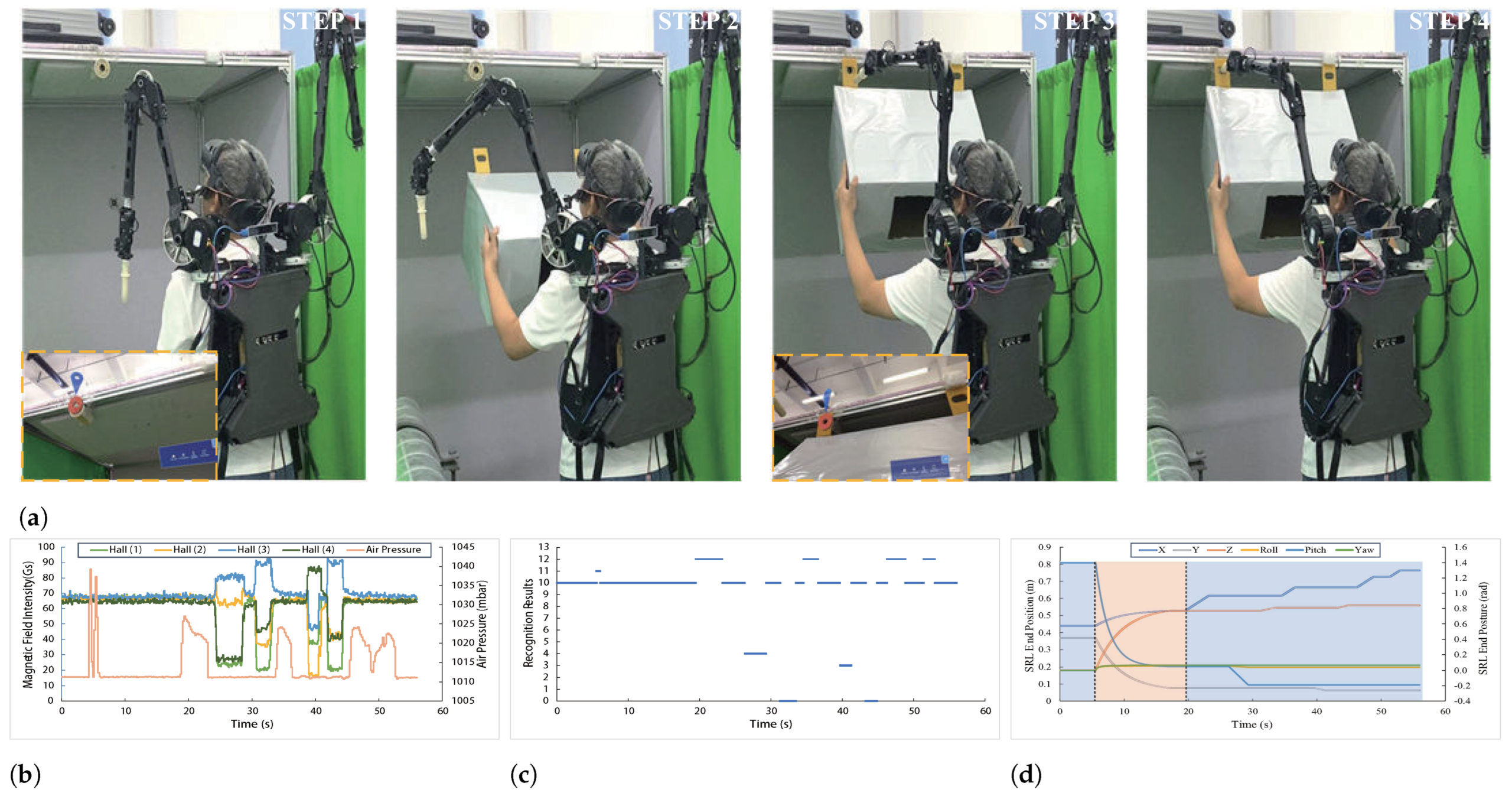
共享控制與自主避障:利用 SRL Proxemics(近身空間學) 框架,AI 會自動劃分安全區。當人類主手臂作業時,SRL 會自主負責支撐或傳遞,只有在關鍵時刻才需人類透過微小的感官暗示(如舌尖觸覺界面或語音)介入微調。
-
多模態神經映射:最新的研究如 RT-X 跨領域模型,能將人類的肌電訊號(EMG)與眼動追蹤結合。AI 學習人類的「作業節奏」,當你眼神看向某個工具時,SRL 便已預判路徑並將其準備就緒。
尖端研發前哨:重新定義人機邊界的先行者
在穿戴式機器手臂(SRL)從實驗室走向市場的關鍵進程中,三大研究機構分別從「任務邏輯」、「神經控制」與「社會心理」三個維度,奠定了現代多肢協作的理論基礎。
1. MIT d’Arbeloff Lab:基於 Petri Nets 的動作先知
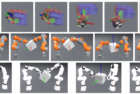
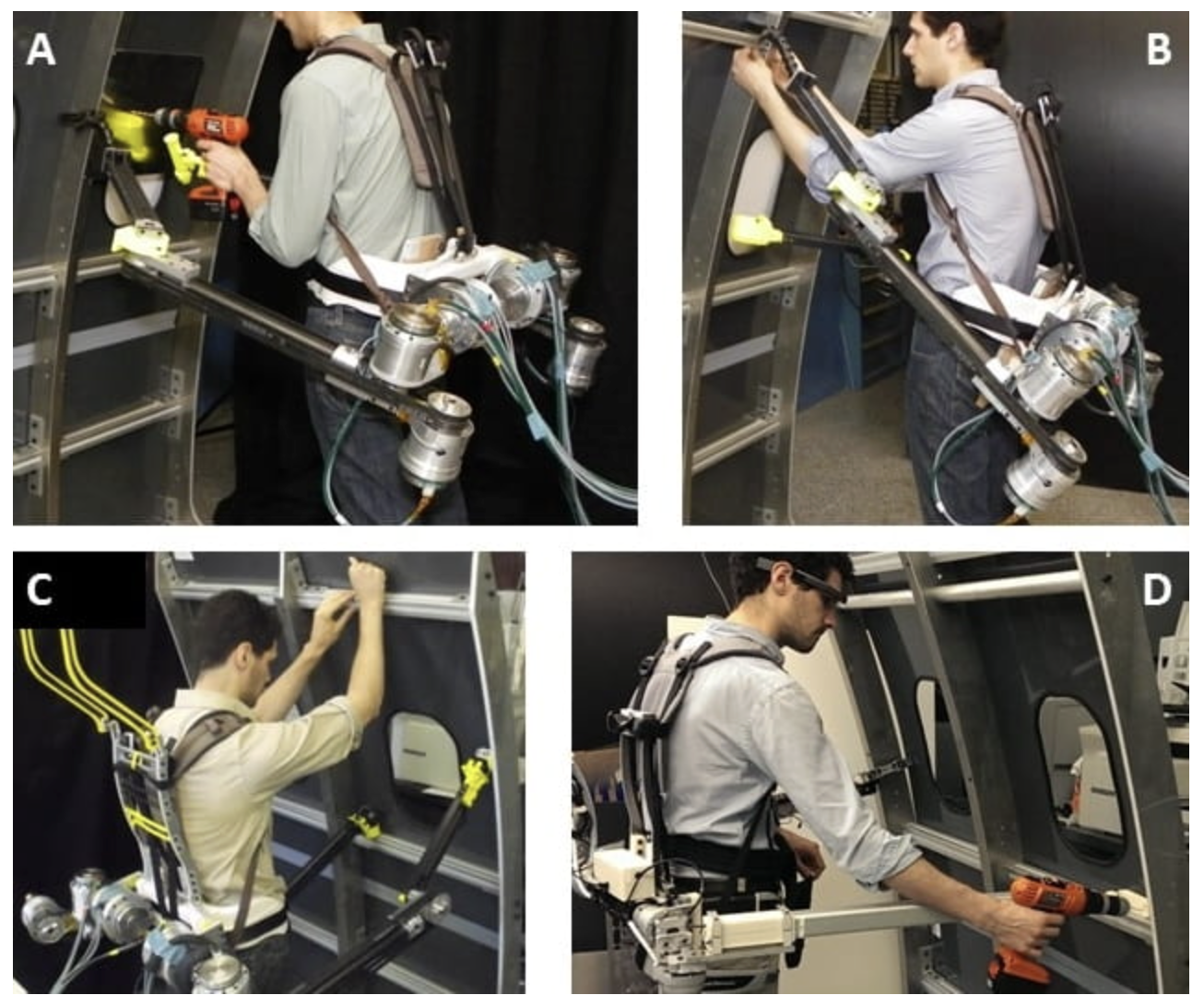
MIT 的 d’Arbeloff 實驗室是 SRL 技術的開山鼻祖。其最新突破在於開發出了一套基於 Petri Nets(培崔網路) 的任務預測模型。傳統的機器手臂往往只能被動反應,但 MIT 的系統能將複雜的工業任務(如飛機蒙皮鉚接)拆解為數個離散狀態,並透過 Petri Nets 建立數學模型。當感測器偵測到人類左手拿起鉚釘、右手準備氣動槍時,系統會精準預測下一個狀態,自動驅動背後的雙臂移動至支撐點提供結構補強。
這種「任務預測模型」解決了 SRL 最大的技術痛點:協調性。透過 Petri Nets 的邏輯門機制,機器手臂能有效處理並發事件(Concurrent events),確保在多任務並行時,機器動作不會與人類動作發生邏輯衝突。實驗數據顯示,這套模型能讓機器人的預判準確率提升至 95% 以上,讓穿戴者感覺背後的兩隻手彷彿具備了「戰友般的默契」,能提前在人類發力前就位,達成真正的無縫協同。
2. Imperial College London:腦機接口實現「無感操控」
倫敦帝國學院(ICL)的 Human Robotics Group 則將研究重心放在神經生理層面。他們在 Shared Control(共享控制) 框架下,成功進行了結合 腦機接口(BCI) 與肌電訊號(EMG)的無感操控實驗。研究團隊認為,要讓第三隻手真正成為身體的一部分,操控指令不能占用原本的運動神經通路。透過植入式或高解析度非侵入式 BCI,實驗對象能以單純的「意念」或眼動,在不干擾雙手作業的情況下,獨立指揮額外的機器手臂進行取物。
這項實驗的里程碑意義在於證實了人類大腦具備極佳的「神經可塑性」。透過 ICL 開發的解碼演算法,大腦能學習將多出的機械肢體視為「原生部位」。在實驗中,受試者甚至能像控制呼吸一樣,直覺地調整 SRL 的張力。這種「無感操控」技術不僅大幅降低了長時間作業的認知負載,更為高難度的外科手術提供了全新的可能——外科醫師能以意念調整內視鏡位置,同時雙手繼續專注於微米級的切割任務。
3. Inami JST Project:Jizai Arms 與多肢體社交美學
相較於美歐著重於功能性,東京大學 Inami JST Project(自在肢項目)則從「具身認知」與「社交心理」出發。其開發的 Jizai Arms(自在肢) 是一套具備極高工業美感的模組化六臂系統。該研究的核心在於探索「多肢體社交」:當人類擁有更多肢體時,人與人之間的物理互動模式將如何改變?例如,兩人之間透過各自的機器手臂進行「第三手握手」,對人類自我認同與空間感知(Body Schema)會產生什麼樣的心理衝擊。
稻見昌彥(Masahiko Inami)教授的研究發現,人類能迅速產生「肢體所有權感(Sense of Ownership)」。透過 Jizai Arms 的交換與掛載實驗,團隊發現當使用者將肢體「借給」他人或與他人聯手完成任務時,會產生一種超越言語的深度同步感。這項研究不僅提供了 SRL 的硬體標準化方案,更為未來機器人融入人類社交場合(如護理溝通、協作表演)提供了寶貴的心理學數據,預示著未來社會「肢體」將成為一種可隨時插拔、分享的數位化生理資產。
預見未來場景
1. 高精尖製造:航太與造船的「超級工匠」
在大型航太零件組裝中,狹窄的艙體空間往往容不下多名工人,但單人作業又難以平衡大型零件。配備 SRL 的工匠可以一人完成三人的工作:雙手進行精密鑽孔,SRL 負責重力支撐與碎屑清理,顯著降低了工安風險並提升 60% 以上的作業效率。
2. 醫療與長照:醫護人員的「數位外掛」
在居家照護中,一名護理師若要為失能長者翻身並同時進行傷口護理,通常極度吃力。SRL 能提供穩定的物理支撐(如托住長者背部),讓醫護人員能騰出雙手進行專業醫療處置,這解決了高齡化社會中照護人力嚴重短缺的痛點。
3. 極限作業與搜索救援:災難現場的「多臂先鋒」
在瓦礫堆搜救時,救援隊員需要一邊搬開石塊,一邊維持自身平衡並操作探測器。SRL 可以作為「動態支撐點」抓牢不穩固的結構,確保隊員安全,同時自動掃描周邊環境熱顯像。
結語
SRL 的發展不僅是工業技術的演進,更是一場關於「人類定義」的哲學討論。當 AI 能完美代償我們的大腦處理額外肢體時,人類將具備處理多維任務的能力。這不僅是產能的飛躍,更是讓殘疾人士、高齡者以及極限勞工重新獲得身體自主權、甚至超越生物極限的關鍵鑰匙。
(責任編輯:歐敏銓)
》延伸閱讀:
-
arXiv (2026): SRL Proxemics: Spatial Guidelines for Supernumerary Robotic Limbs
-
MDPI (2025): Shared Control of SRL Using Mixed Reality and Mouth-and-Tongue Interfaces
-
MIT d’Arbeloff Laboratory: Supernumerary Robotic Limbs Project
-
Hyundai News: AI Robotics Strategy and X-ble Shoulder Development

- NVIDIA與Hugging Face為LeRobot導入全新開源模型與框架 - 2026/07/13
- 電腦視覺結合AI、數位孿生 2026年世足賽號稱史上最「高科技」 - 2026/07/10
- Agentic PC來了?NVIDIA RTX Spark重塑邊緣、桌機算力版圖 - 2026/07/09
訂閱MakerPRO知識充電報
與40000位開發者一同掌握科技創新的技術資訊!